Autosar CAN开发06(CAN通讯开发需求-CAN矩阵)
前言
在这之前,我们已经了解了CAN总线的相关概念,那么接下来,我们就看看汽车行业CAN总线相关的开发需求。
当然了朋友们,CAN相关的开发内容是非常多的,比如应用报文开发、网管报文开发、诊断报文开发、XCP开发、CAN时间同步报文开发、J1939等等,这些都属于CAN报文开发的范畴。
在这里我们先只讲一下最简单、最常用、同时也是最重要的:应用报文开发。至于其它内容,我们后续会在其它文章单独讲解。
应用报文概念
这应用二字,实际上跟我们工作常说的应用层中的应用是一个意思。我们开发一个项目,最重要的目的是啥?就是用这个东西的应用功能嘛对吧。
举个栗子:
比如车上的仪表。
它功能就是用来显示各种车身数据,比如显示车速,仪表仅靠自己肯定是不能知道车速的,它只能是车上的其它管车速的地方,把车速传过来,然后仪表收到后,就把车速显示出来。
当这个车速信号是通过CAN报文传过来的时候,这个CAN报文就叫做CAN应用报文。
实际上,车上那么多ECU,每个ECU都需要其它节点传过来的各种数据,比如ECU-A工作需要使用ECU-B的车门开关状态、转向灯状态。ECU-B工作又要用ECU-C的温度、电压等等。
而这些传来传去的,用于应用功能数据传输的报文,叫做应用报文。
为什么说它最重要呢?
因为如果缺了应用报文,整个东西的主要功能就废了。
比如有一个牛逼的风扇,它能休眠低功耗(网管报文)、能接上诊断仪升级(诊断报文)等等,但它主要应用功能是干啥?用来吹风嘛对吧,但如果它直接不吹了,那还休眠个啥,升级个啥?
...
在企业中,当某个项目刚开始时,车企会只要求ECU实现应用报文的功能,使得车上的应用功能能正常就可以了,至于网管报文、XCP、诊断等等,这些报文功能,推迟一点实现是没问题的。
应用报文需求(CAN矩阵)
1、背景介绍

知道啥是CAN矩阵的朋友,可以跳过这一节。
CAN矩阵就是关于CAN应用报文的需求。
在了解什么是CAN矩阵之前,我们需要了解一下实际车企与各个供应商之间的一个背景。
大家都知道,一辆车的组成是非常复杂的,车上的不同零部件来源于不同的零部件供应商。
举个简单的栗子。
某大车企甲,它要造一辆车。
这辆车上有3个ECU:ECU_A、ECU_B、ECU_C。它们分别来自于供应商A、B、C。
那么问题来了。
我们前面说过,一辆车要正常跑起来,各个ECU之间会有大量的数据交互,ECU_A可能用到其它两个ECU传过来的数据,ECU_B、ECU_C也是一样的情况。
但是,供应商A、B、C是车企甲的客户,供应商A、B、C之间是不认识的。
那咋办?总不能车企甲把他们3个拉出来吃顿饭认识一下吧?
所以车企想了个办法。
由于车企是统筹这辆车的,是知道每个ECU要干什么事情的。
于是,车企把ECU_A要从其它两个ECU接收的数据、以及ECU_A要发送给其它两个ECU的数据整理到一个EXCEL表里,然后释放给ECU_A。对于其它两个ECU,车企也是如此操作。(也可能都给一模一样的CAN矩阵,但这个CAN矩阵会包含3个ECU节点所有接收、发生的报文信号)
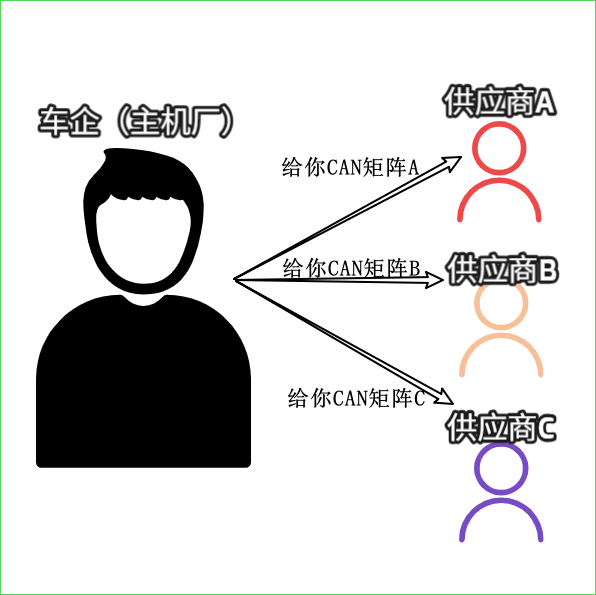
有了这个EXCEL,供应商之间就不用去认识彼此了。供应商开发功能的时候,对着EXCEL表开搞就行。
而这个EXCEL,对于供应商来说,就是所谓的应用报文需求,也既CAN矩阵。
2、认识CAN矩阵
了解了CAN矩阵的背景后,接下来,我来看一下CAN矩阵里面都有啥,以及它们是什么意思。

首次接触的朋友看到这CAN矩阵估计会有点懵,不明白里面的意思。
我们接下来一一讲解。
2.1 CAN报文(Message)
首先,我们来看看CAN矩阵里面关于CAN报文的相关属性。
另外说明一下,以下报文属性的名称在不同车企的CAN矩阵中,使用的名字不一,只要表达了对应意思即可。
2.1.1 报文名称(Message Name)
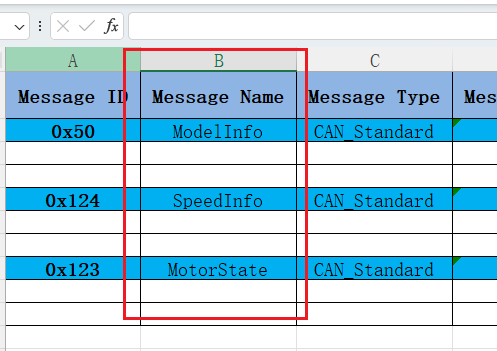
每条报文都必须有属于自己的名称,但这个名称唯一的作用就是给别人(工程师)看的。
从实际物理层面,在CAN数据传输时,没有报文名称这个东西。
2.1.1 报文长度(Message Length)
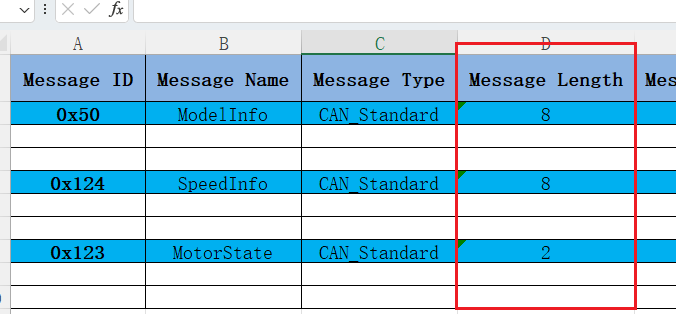
既报文数据长度。(单位为byte)
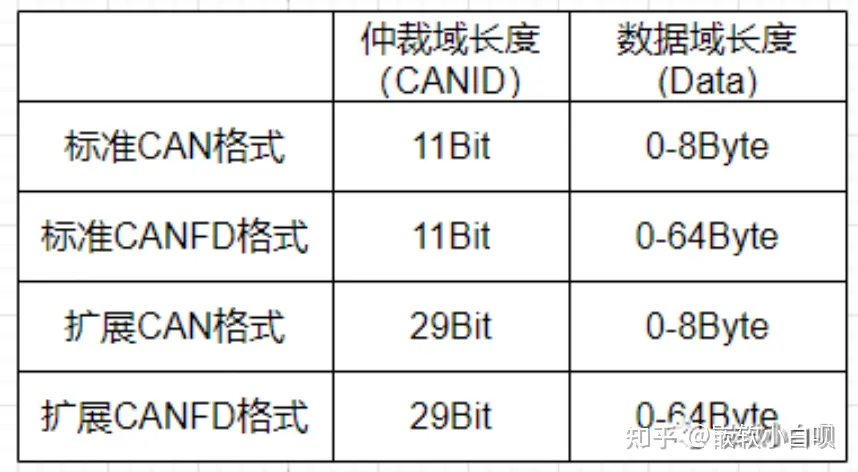
普通格式的CAN报文的数据长度最长是8 Byte,CANFD格式的CAN报文长度最长是64Byte。
2.1.3 报文ID(Message ID)
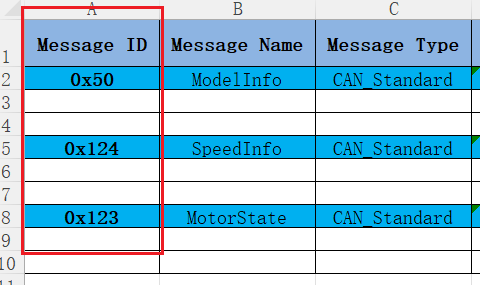
对于标准格式CAN报文,CANID范围为0x0~0x7FF(占用11bit)。
对于扩展格式CAN报文,CANID范围为0x0~0x1FFFFFFF(占用29bit)
2.1.4 报文类型(Message Type)
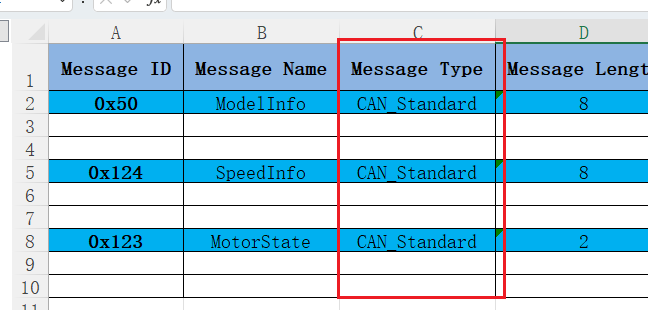
即下列的四种格式。(上图所示CAN报文类型为标准CAN格式)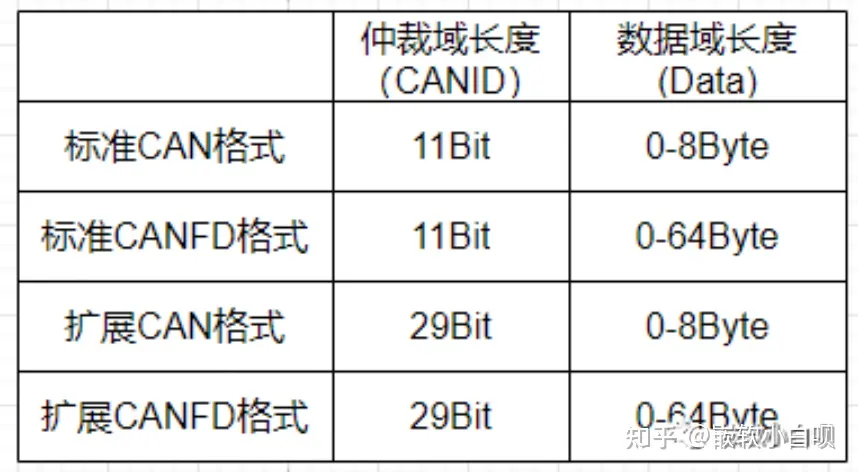
2.1.5 报文发送类型(Message Send Type)
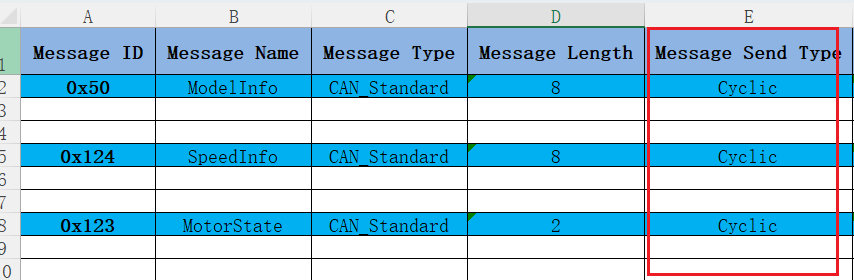
(上图所示3条报文都是周期报文)
周期报文:报文按照固定周期发送
事件报文:报文在某事件触发后按照约定周期发送n帧该报文。至于这个事件是什么,则是客户去定的
周期事件报文:报文在正常情况下按照固定周期发送,在某事件触发后,则按照事件触发后的约定周期快速发送n帧报文
2.1.6 报文发送周期(Period)
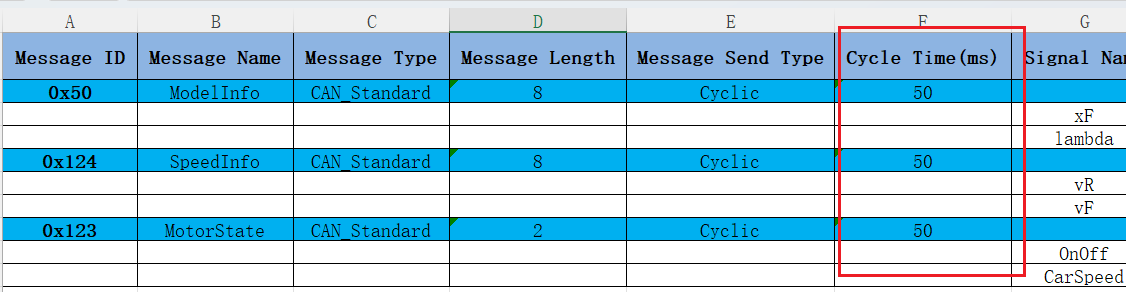
即报文固定发送的周期(仅针对周期报文、周期事件报文)。
2.1.7 报文重复发送次数(Number of Repetition)
即某事件触发后,报文重复发送的次数(仅针对事件报文、周期事件报文)。
2.1.8 报文重复发送周期(Repetition cycle time,待修改)
即报文重复发送的周期(仅针对事件报文、周期事件报文)。
2.2 CAN信号(Signal)
关于CAN信号,我们先举个栗子去理解一下什么是CAN信号。
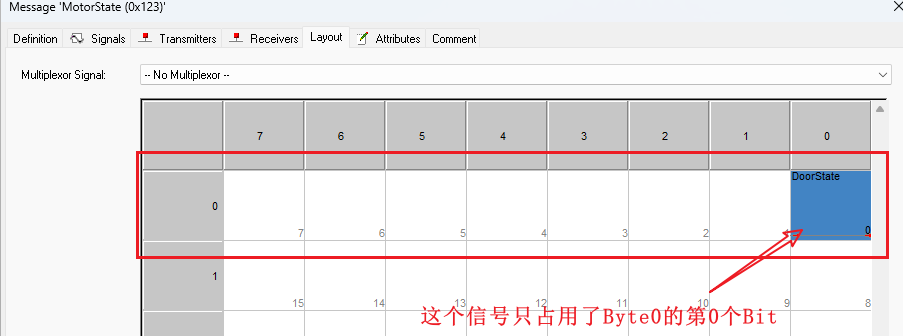
比如有一个车门开关的信号"Signal_DoorState"。它的值只有0或1,因此,它只需要占用1个bit,如下图所示。
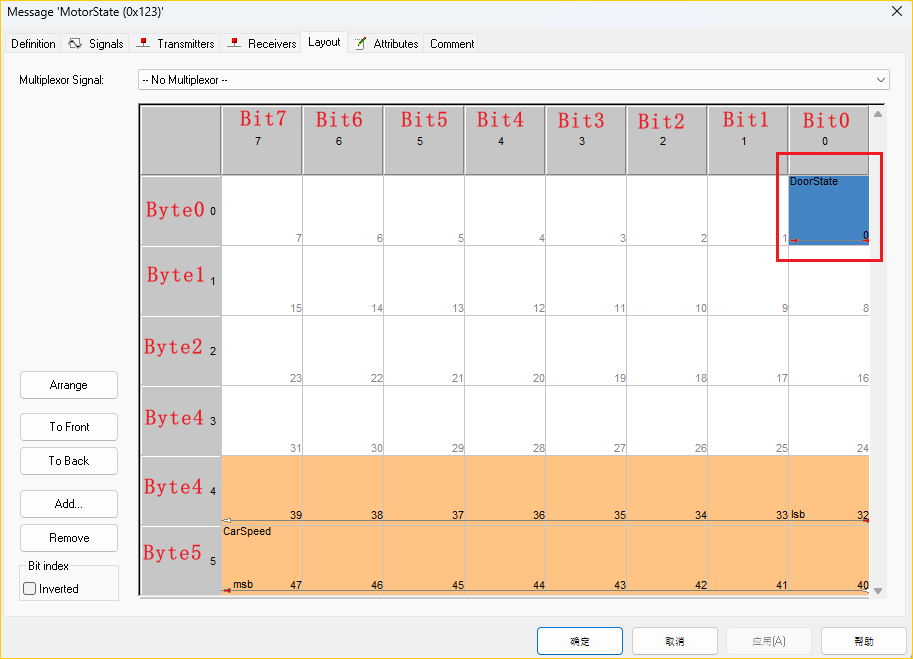
从这里大家应该看出来了,一个报文可以放很多CAN信号,具体能放多少,取决于报文总长度以及每个信号的长度。(比如上图,这个0x123报文只放了2个信号,空白的地方都没用上。)
再比如一帧CANFD、64Byte的报文,总共有64*8=512个bit,如果每个bit都放一个信号,总共有512个信号。
好了,接下来,我们来看看CAN信号的相关属性。
2.2.1 信号名称(Signal Name)
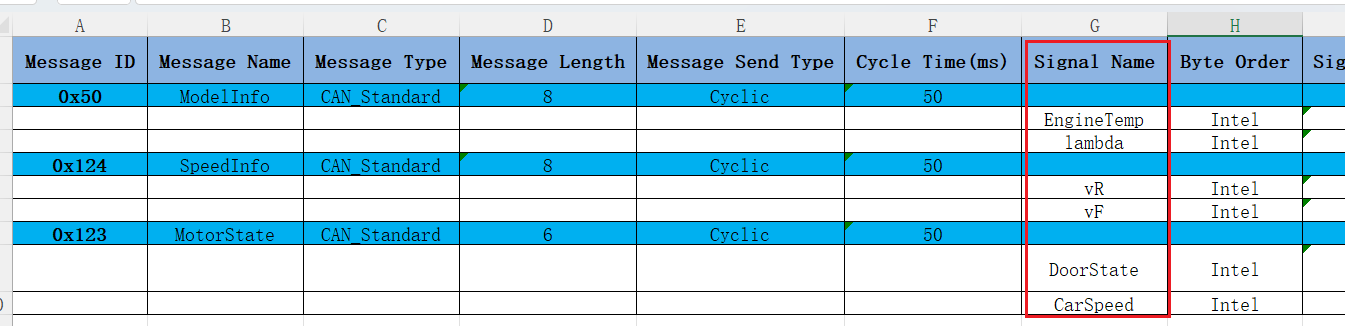
跟报文名称一样,每个信号都必须有属于自己的信号名称,但这个名称唯一的作用就是给别人(工程师)看的。
从实际物理层面,在CAN数据传输时,没有报文名称这个东西。
2.2.2 信号大小(Signal Size)
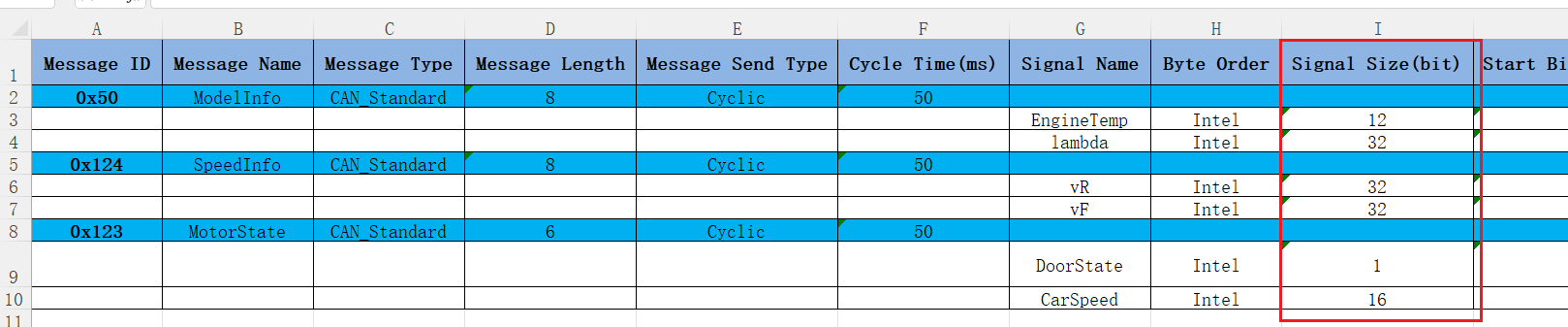
即信号的长度。(单位为Bit)
2.2.3 信号排列(Byte Order)
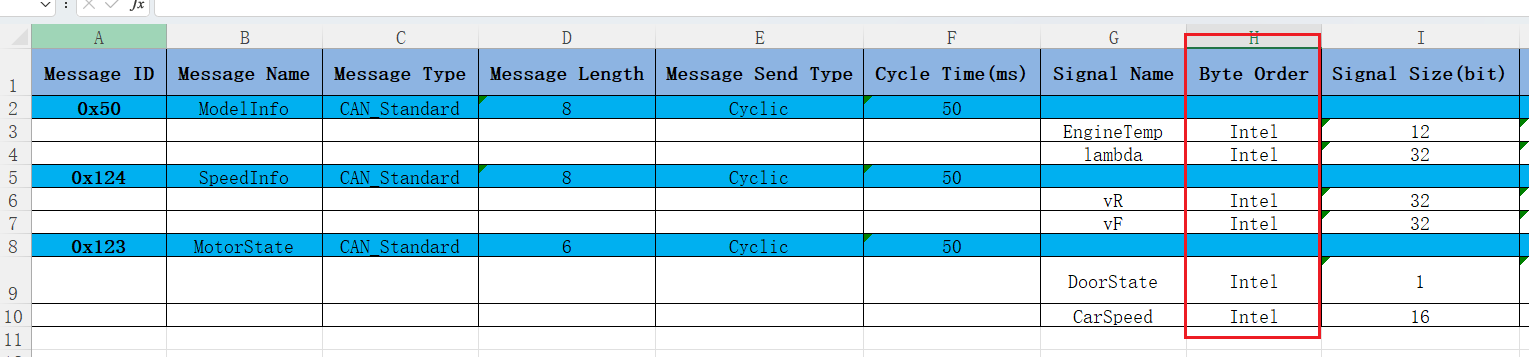
信号排列方式有2种:Motorola、Intel。Motorola即我们常说的大端,Intel即小端。
所谓的大端,即高字节在前面,小端则是低字节在前面。
这是啥意思呢?
首先从字面意思要注意到的一点:如果信号没有跨字节,就没有大小端的说法,因为它只在一个字节里面,哪有高低字节之说。
因此,大端小端是针对跨字节的信号的。
接下来,举个栗子理解大小端。
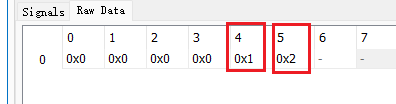
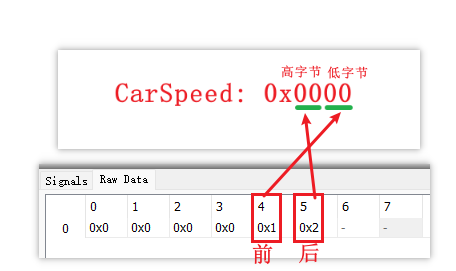
假设一个信号叫做车速:VehicleSpeed,它的信号大小是16个bit(2Byte)。如果我现在传条8Byte的报文给你,并告诉你,Byte4-Byte5就是这个车速信号的值。
于是,收到数据后,你把数据从报文里面提取出来,得到Byte4是0x01,Byte5是0x02。
接下来,需要把2个数据组合起来才能得到这个信号真正的值。
是0x0102 ?还是0x0201呢?顺序一变,这个车速值可是天差地别。
所以,在信号传给你之前,我还需要告诉你,这个跨字节的信号是怎么样的排序方式。
2.2.3.1 大端
如果我说是大端:则高字节在前。
所谓高,是指信号值的高字节。
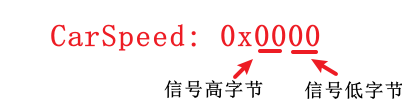
所谓前,则是指数据在CAN总线传输的顺序中位于前,显然Byte4前于Byte5
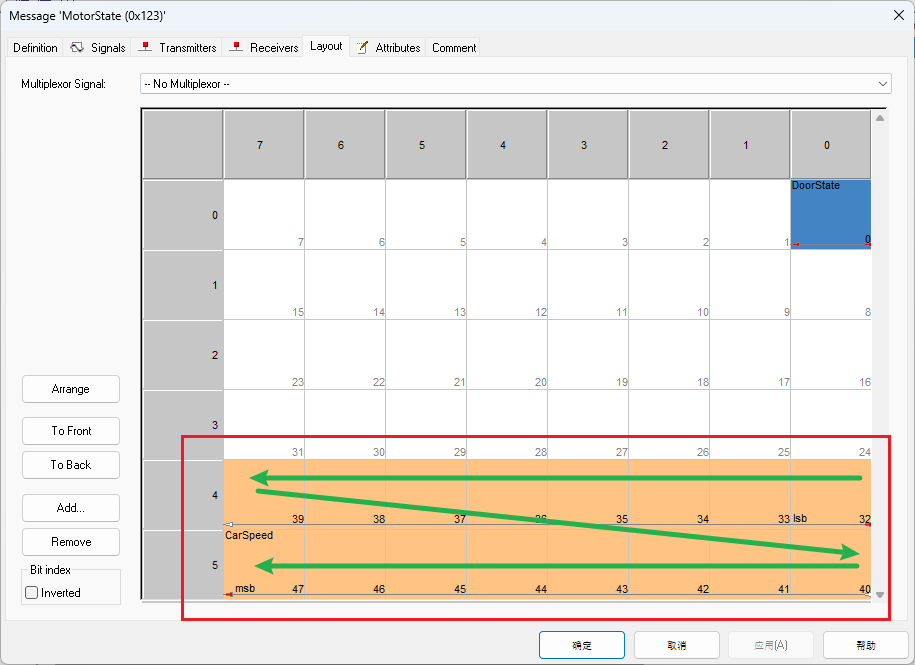
因此,VehicleSpeed = 0x0102。(即,在前面的Byte4(0x01)是信号的高字节。如下图所示)
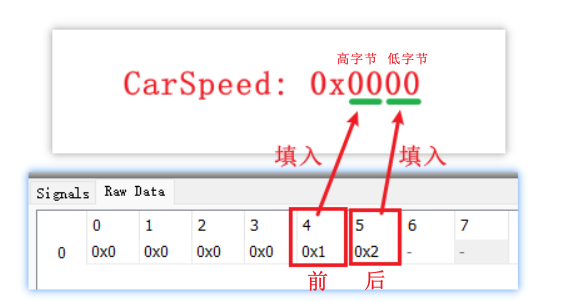
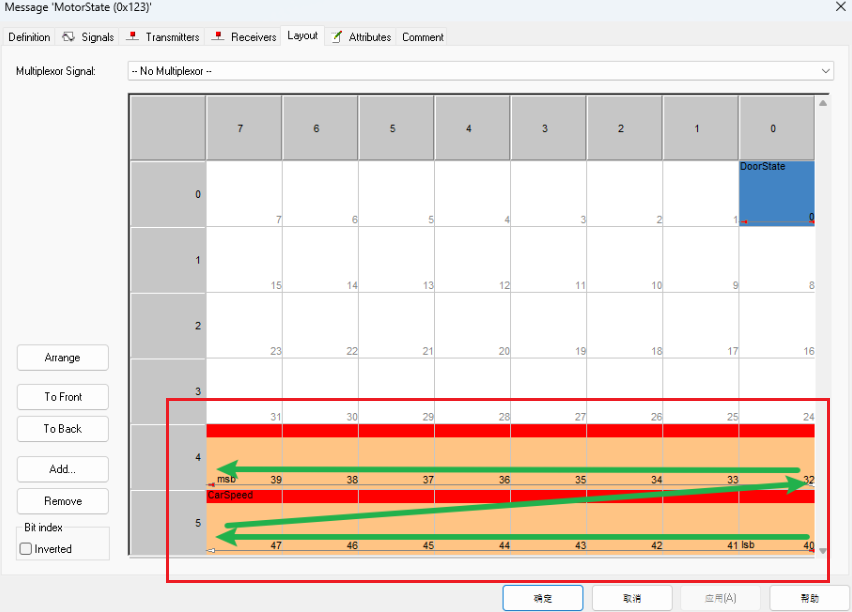
Motorola格式,在报文Layout中,信号排列顺序如下图所指示方向。
2.2.3.2 小端
如果我说是小端:即低字节在前。
所谓低,是指信号值的低字节。
所谓前,则是指数据在CAN总线传输的顺序中位于前,显然Byte4前于Byte5
因此,VehicleSpeed = 0x0201。(即,在前面的Byte4(0x01)是信号的低字节。如下图所示)
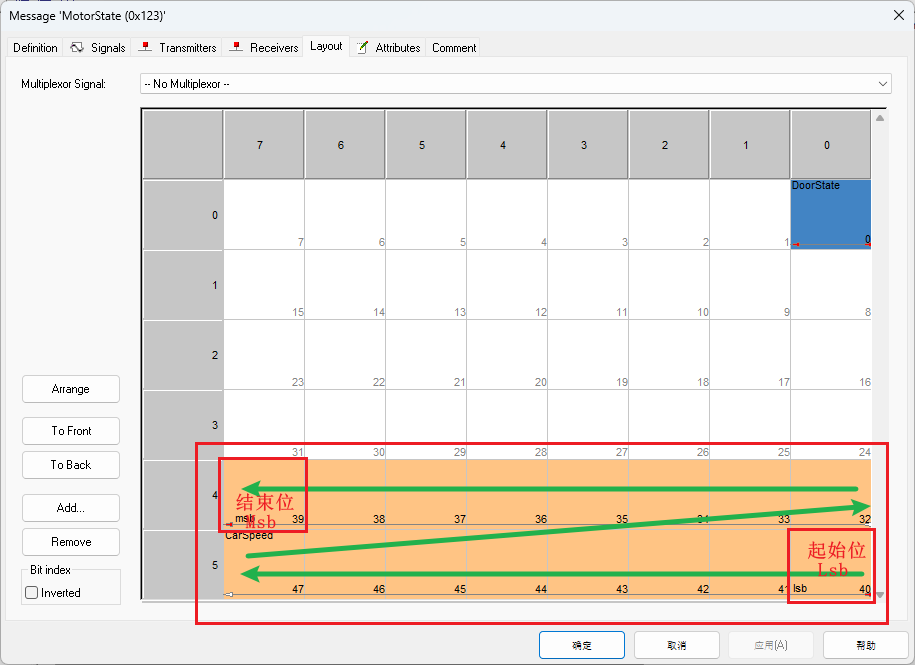
Intel格式,在报文Layout中,信号排列顺序如下图所指示方向。
2.2.4 信号起始位、结束位(Lsb/Msb)
即信号在报文里面的起始位置。如我们上面讲到的CarSpeed信号
如果是Intel格式,Lsb 为32,Msb为47
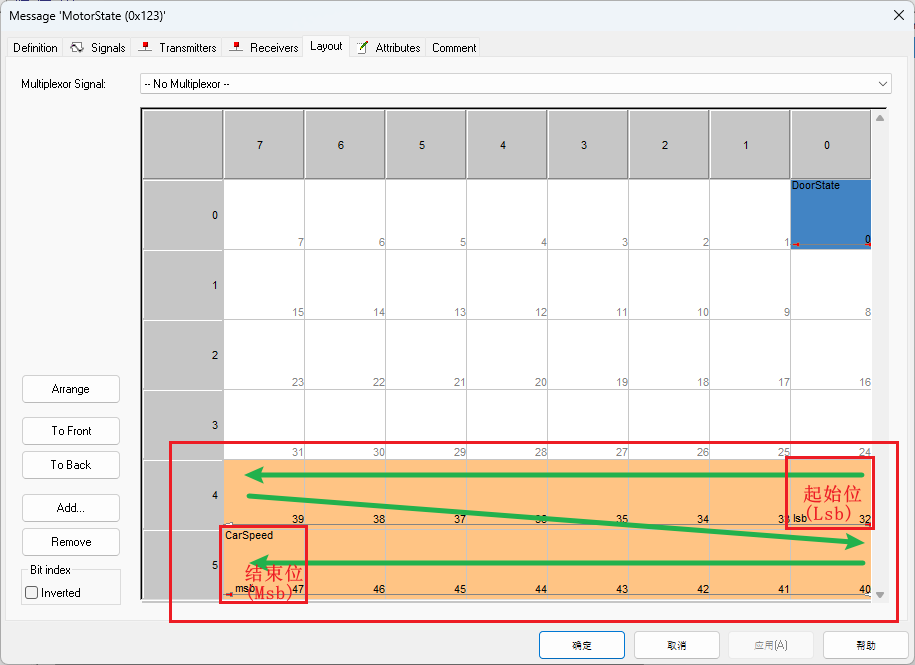
如果是Motorola格式,Lsb 为40,Msb为39
实际上,CAN矩阵里面一般只提供Lsb。(少数企业提供Msb),但效果都是一样的。
比如只知道了Lsb,再知道信号排列和信号大小,就能算出Msb的位置了。因此如果Lsb和Msb两个都给就反而多余了。
2.2.5 信号精度(Factor)
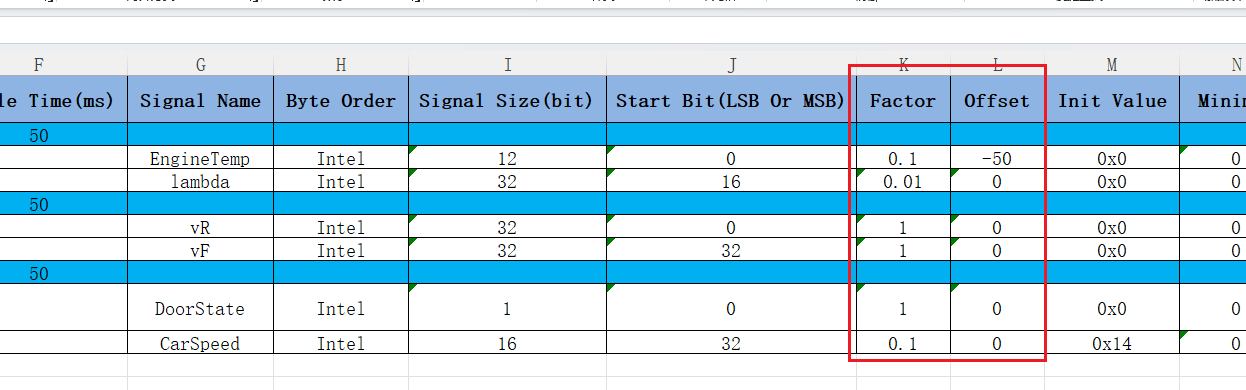
信号精度,有些CAN矩阵里面也叫做Resolution。
2.2.6 信号偏移(Offset)
信号精度和信号偏移两者是放在一起的。他们的作用是用在一条公式里面:
(Physical value) = (Raw value) * (Factor)+ Offset
我们来看看Physical value和Raw value的意思。
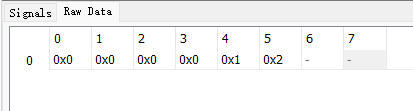
所谓Raw value,即原始值,就是在CAN总线上传输的值,如下图所示:
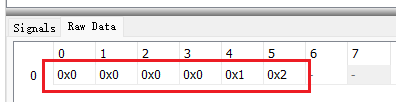
大家也看出来了,总线传不了浮点型的数据,以及如果传有符号的数据会比较麻烦(指定信号某个位代表正负)。
于是,Factor和Offset就出来了。比如我要传一个温度数据:-12.5°
那么,在数据传输前,我先把数据转换一下(假设Factor是0.5,Offset是-20):
(-12.5) = (Raw value) * (0.5)+ (-20)
即Raw value为15,十六进制表示为0x0F。当别人收到0x0F的时候,则按照约定好的Factor和Offset再转换一下,就能得到-12.5了。
2.2.7 信号初始值(Init Value)
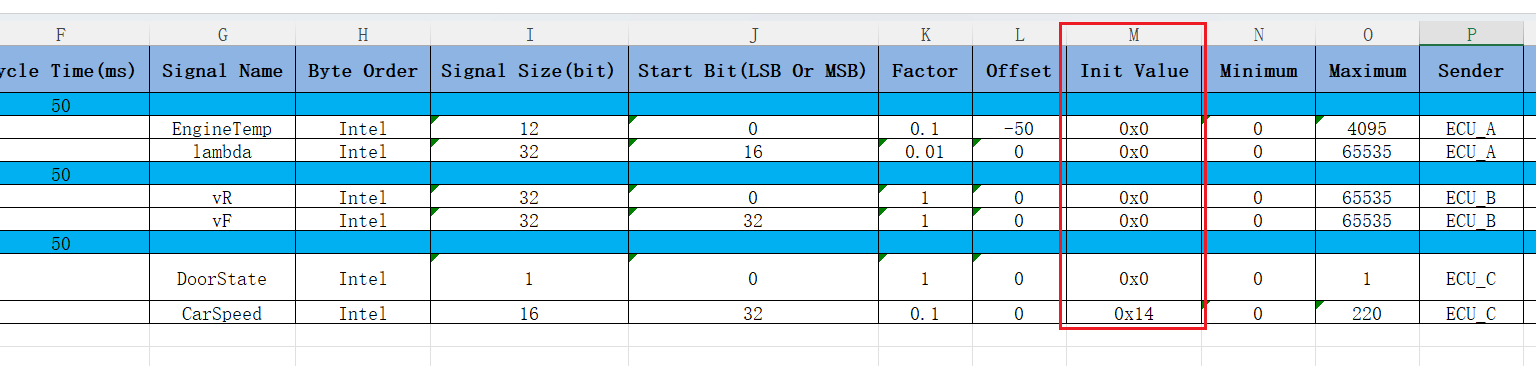
信号初始值的作用也是非常大的。
对与发送报文信号来说,当ECU刚启动时,通常会要求在最短的时间内发出固定周期的报文信号。
此时由于很多功能还没跑起来或者相关功能没有计算出数据,这时候报文数据就需要发出CAN矩阵里面指定的默认值。
对与接收报文信号也是一样的,在ECU刚启动时,别人可能还没发出报文数据,这时候你就要先使用默认值了。
2.2.7 信号最大值、最小值(Minimum/Maximum)
这没啥好说的,即字面意思。
但是大家需要注意,这两个值在CAN物理层面上也是没有任何作用的。因为总线传输信号,一个信号的最大值最小值实际上取决于它的信号长度。
比如,信号长度是4个bit,这里从物理层已经限制了它的最大值是15了。
至于CAN矩阵里面的最大最小值,通常是用于应用层实现功能时做限制。
2.2.7 发送节点(Sender)
即此报文的发送方,且发送方有且只能是一个ECU,
2.2.7 接收节点(Receiver)
即此信号的接收方,接收方可以是多个ECU。
下一篇文章,我们就基于CAN矩阵需求去实现对应的功能。
返回目录:
Autosar BSW 开发笔记(目录)-CSDN博客