7.重建大师点云处理教程
摘要:本文主要介绍重建大师点云处理模块,包含:添加站式激光点云、添加移动激光点云、点云切块等。
新建工程后,点击数据管理界面添加点云按钮,如下图所示:

图 添加点云按钮
或者点击区块,在点云页面也可以添加点云文件,如下图,两种点云方式的导入均可;

图 区块页面添加点云
1.添加站式激光点云
点击添加站式点云按钮,进入下图页面所示:
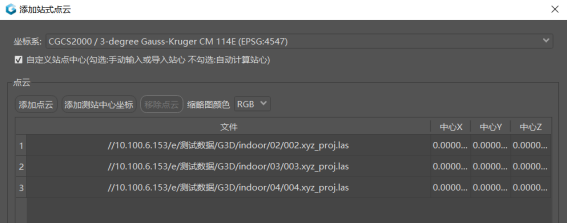
图 地面站点云导入界面
选择合适的点云坐标系,点击添加点云,依次添加点云文件,格式支持las/pts/e57三种格式;
添加测站中心坐标,有两种方式:
一种是在点云列表右侧手动添加站心坐标;
另一种是点击添加测站中心坐标,将测站中心坐标文件导入,文件支持txt格式;文件样例如下图,包含点云名称、x、y,z排列,中间用空格隔开:
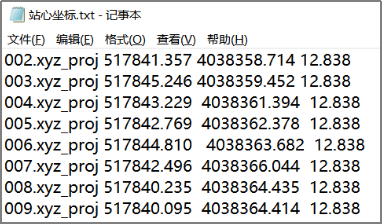
图 站心坐标格式
如无站心坐标,软件可自动推算,取消勾选自定义站心坐标即可。
2.添加移动激光点云
点击添加移动点云按钮添加移动点云,如下图所示,从上到下为选择点云坐标系、添加点云文件路径、添加航迹线文件路径、选择航迹线文件格式、选择航迹线(POS)坐标系。
导入的点云要选择对应的坐标系,航迹线文件的坐标系可以和点云坐标系不一致,要保证选择正确;
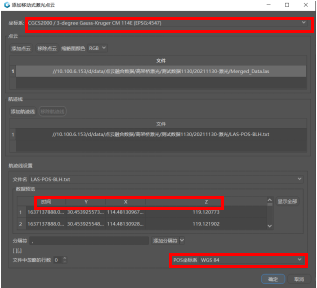
图 移动点云导入界面
添加好点云与航迹线后,点击确定,软件会检查点云与航迹线的时间和位置匹配;
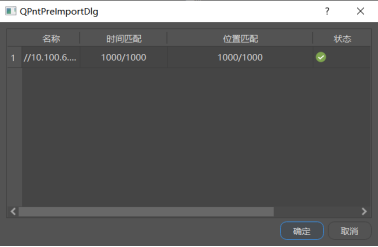
图 点云匹配成功
3.点云切块
点云添加完成后可以在点云管理页面看到点云记录如下图所示,此时点云导入到Block中。
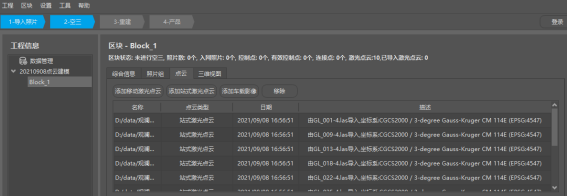
图 导入的点云记录
下图为正在导入点云的综合信息页面,红框中的按钮为点云切块按钮,点击点云切块并启动引擎。
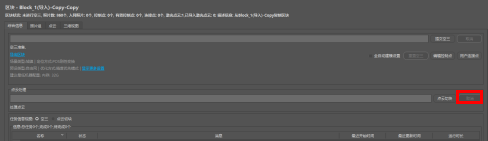
图 点云切块
点云切块支持和空三同时进行,支持多机并行处理,要求从网络共享路径导入点云文件,其他设置与集群处理一致。
点云切块完成后,会将点云文件转换成可视化的小块的OSGB,在三维视图中可点击![]() 查看导入的点云文件。(切块之前无法在三维视图查看);移动式点云切块成功后还会在图中显示航迹线,如图中的黄色标记:
查看导入的点云文件。(切块之前无法在三维视图查看);移动式点云切块成功后还会在图中显示航迹线,如图中的黄色标记:
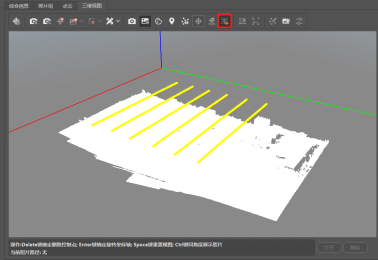
图 在三维视图查看点云文件