Openmanus复现教程:打造自己的Agent助手

文章目录
- Openmanus复现教程:打造自己的manus
- 1. Manus简介
- 2. Openmanus
- 3. 创建环境
- 4. 执行效果
Openmanus复现教程:打造自己的manus
在 AI 驱动的开发工具浪潮中,Manus 凭借其对代码生成、任务自动化的强大支持,成为不少开发者提升效率的 “得力助手”。但官方工具往往存在定制化局限,而OpenManus的出现,为我们打破了这层限制 —— 它作为开源实现,允许开发者基于自身需求调整功能、拓展场景,从 “使用工具” 升级为 “打造专属工具”。
如果你也想拥有一款可自定义的 Manus 类工具,却卡在环境配置、流程复现的环节?这篇教程将带你一步步突破障碍,从概念认知到实际运行,手把手教你搭建属于自己的 OpenManus 环境,最终实现代码生成与执行的全流程落地。
1. Manus简介
在了解 OpenManus 之前,我们先搞懂核心:Manus 到底是什么?
简单来说,Manus 是一款AI 原生的开发辅助工具,它的核心能力围绕 “降低开发成本、提升编码效率” 展开。比如:
面对复杂需求,只需输入自然语言描述(如 “生成一个 DDPG 算法的训练代码”),它就能直接输出结构化的代码框架;
支持多语言、多场景适配,无论是 Python 的深度学习脚本,还是 Java 的后端接口,都能精准匹配语法规范;
能自动处理代码依赖、格式优化,甚至在生成后提供调试建议,减少开发者 “写代码 - 改语法 - 调依赖” 的重复工作。
正是这些特性,让 Manus 成为不少开发者的 “日常搭档”。但官方工具的功能固定,无法满足个性化需求(比如想集成特定的开源库、适配私有开发环境)—— 而 OpenManus 的开源属性,恰好解决了这一痛点。
2. Openmanus
OpenManus 是一个开源的AI工具项目,旨在复刻或替代近期爆火的AI产品 Manus。
它由MetaGPT团队的五名开发者在短短三小时内开发完成,并在GitHub上开源发布。OpenManus的核心目标是提供一个透明、可本地运行的AI工具,能够执行类似Manus的任务,例如自动化生成报告、处理复杂工作流等,但完全免费且无需邀请码。
项目地址:https://github.com/FoundationAgents/OpenManus
3. 创建环境
环境配置是复现的第一步,也是最关键的一步。我们将通过 Anaconda 管理虚拟环境,避免依赖冲突,确保每一步都能稳定运行。
首先打开终端,使用 conda 创建一个名为 “open_manus” 的虚拟环境(指定 Python 3.12 版本,兼容性最优),执行以下命令:
conda create -n open_manus python=3.12
conda activate open_manus
接下来,我们需要从 GitHub 克隆 OpenManus 的源码,并安装项目所需的依赖库。在终端中依次执行以下命令:
git clone https://github.com/FoundationAgents/OpenManus.git
cd OpenManus
pip install -r requirements.txt
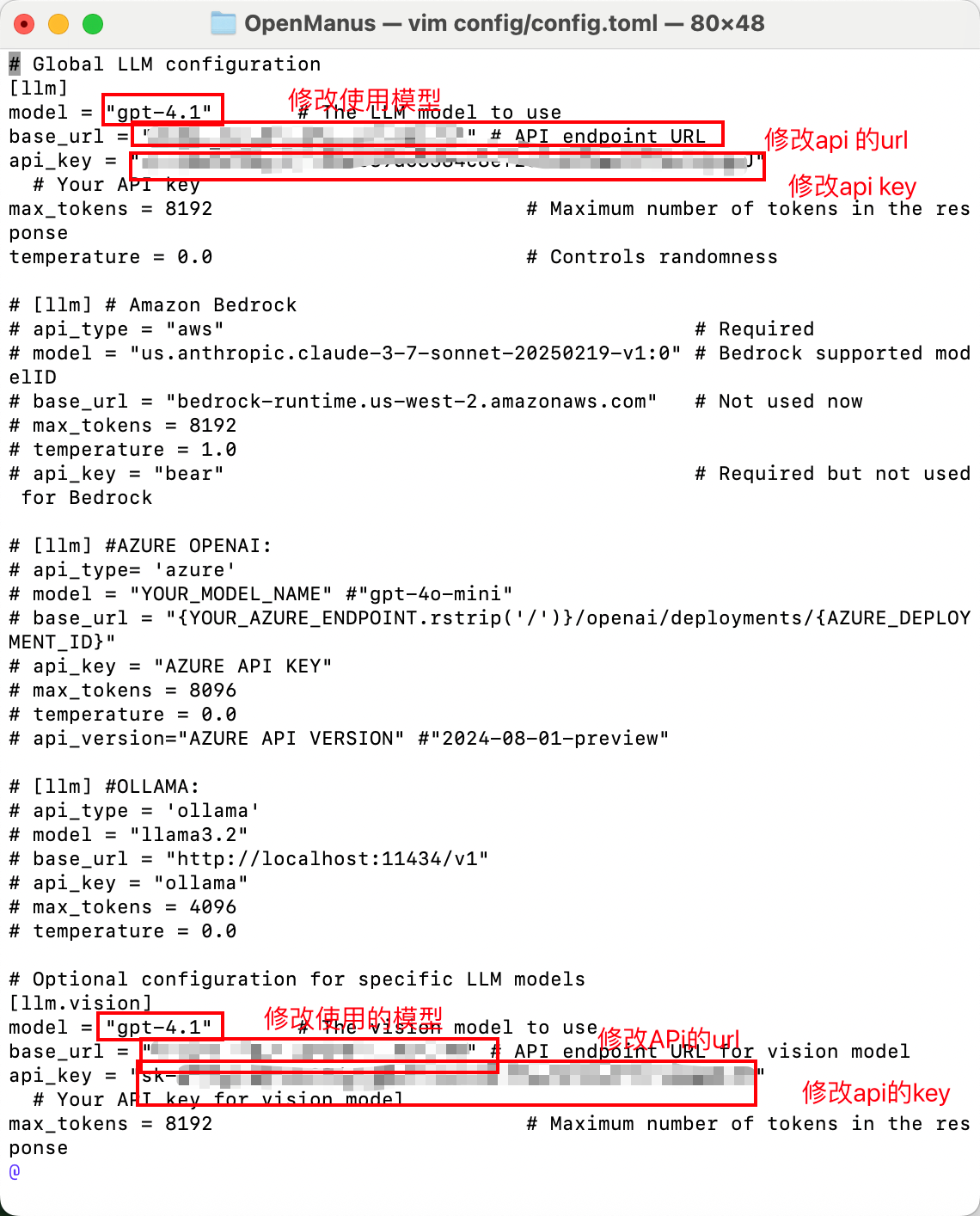
OpenManus 通过配置文件(config.toml)管理运行参数,我们需要先复制示例配置文件,再根据自身需求修改:
cp config/config.example.toml config/config.toml
vim config/config.toml
完成上述配置后,执行以下命令启动 OpenManus:
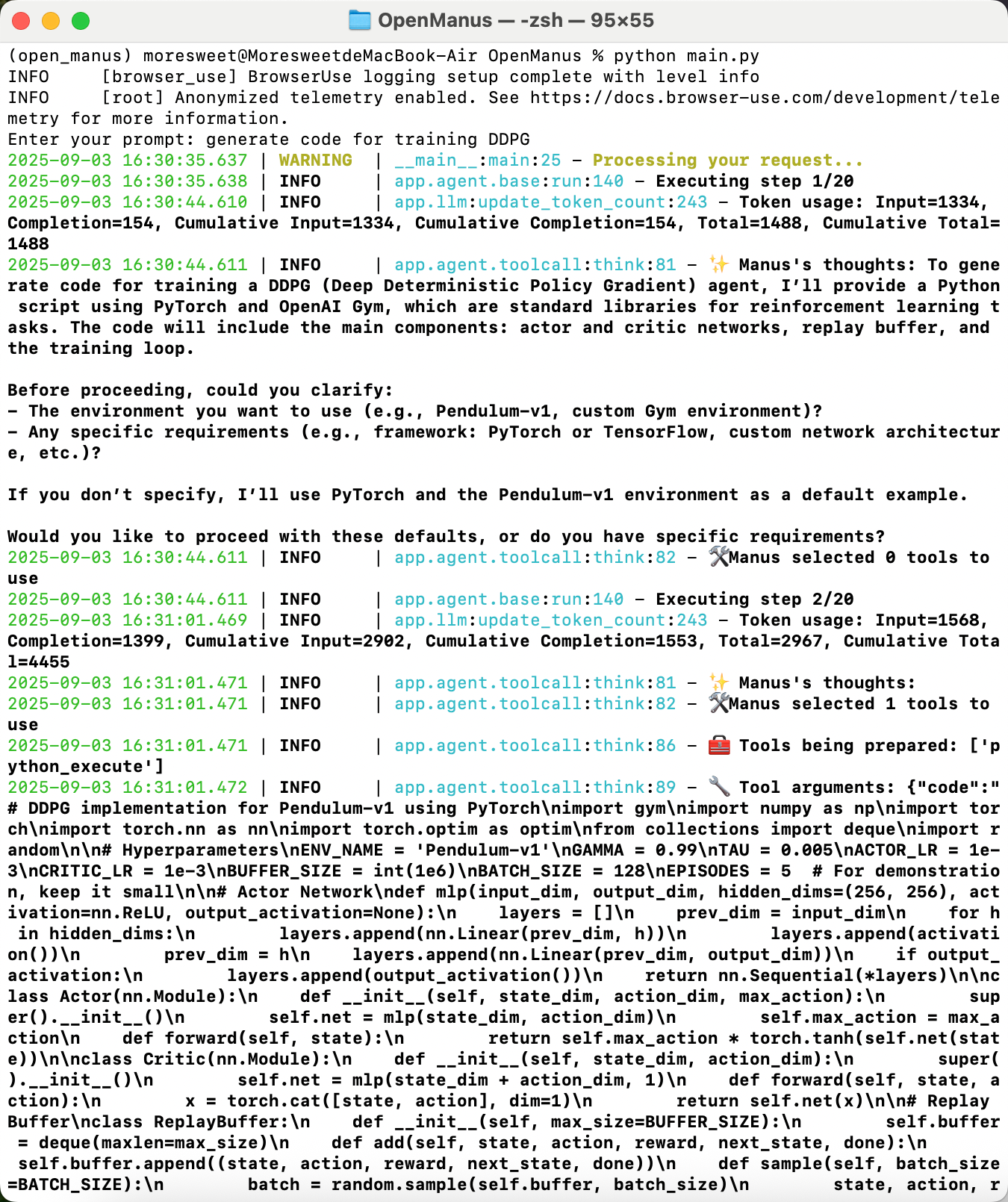
python main.py
启动成功后,终端会提示你输入 “prompt”(即自然语言需求)。笔者这里输入的需求是 “generate code for training DDPG”(生成 DDPG 算法的训练代码)—— 这是强化学习领域的常见任务,正好测试 OpenManus 的代码生成能力。
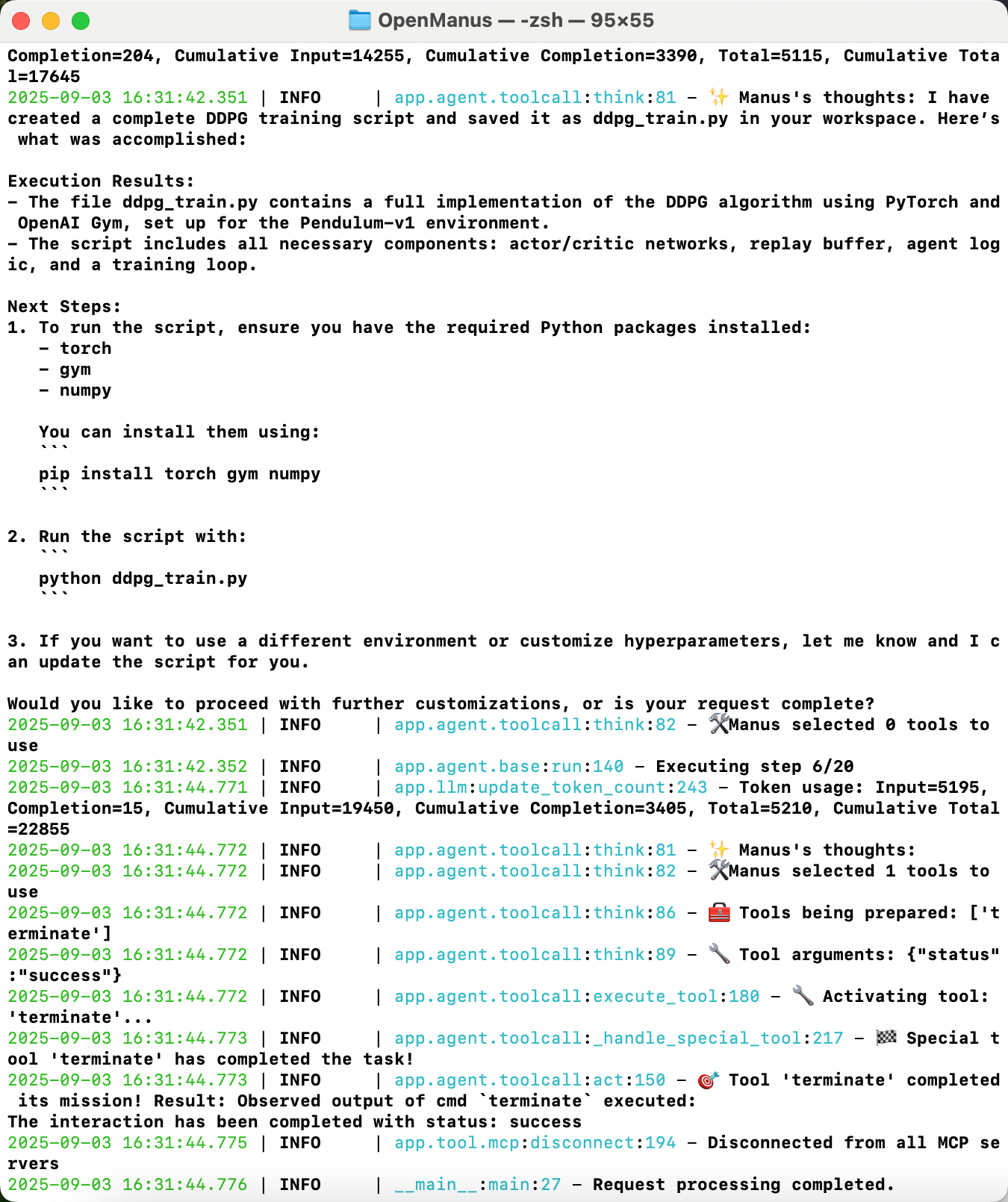
输入 prompt 后,OpenManus 会快速分析需求,并输出代码框架。从下图可以看到,它不仅生成了完整的 DDPG 训练代码(包括网络定义、经验回放、训练循环),还标注了关键步骤的注释,方便后续理解和修改。
此处笔者采用的prompt是“generate code for training DDPG”

4. 执行效果
生成代码只是第一步,能成功运行才是最终目标。我们以刚才生成的 DDPG 训练代码为例,看看如何在本地执行,并验证效果。
OpenManus 生成的 DDPG 代码依赖 PyTorch、Gym(强化学习环境)、NumPy 等库,我们需要进入 workspace 文件夹(代码默认保存路径),安装这些依赖:
cd workspace
pip install torch gym numpy pygame

python ddpg_train.py
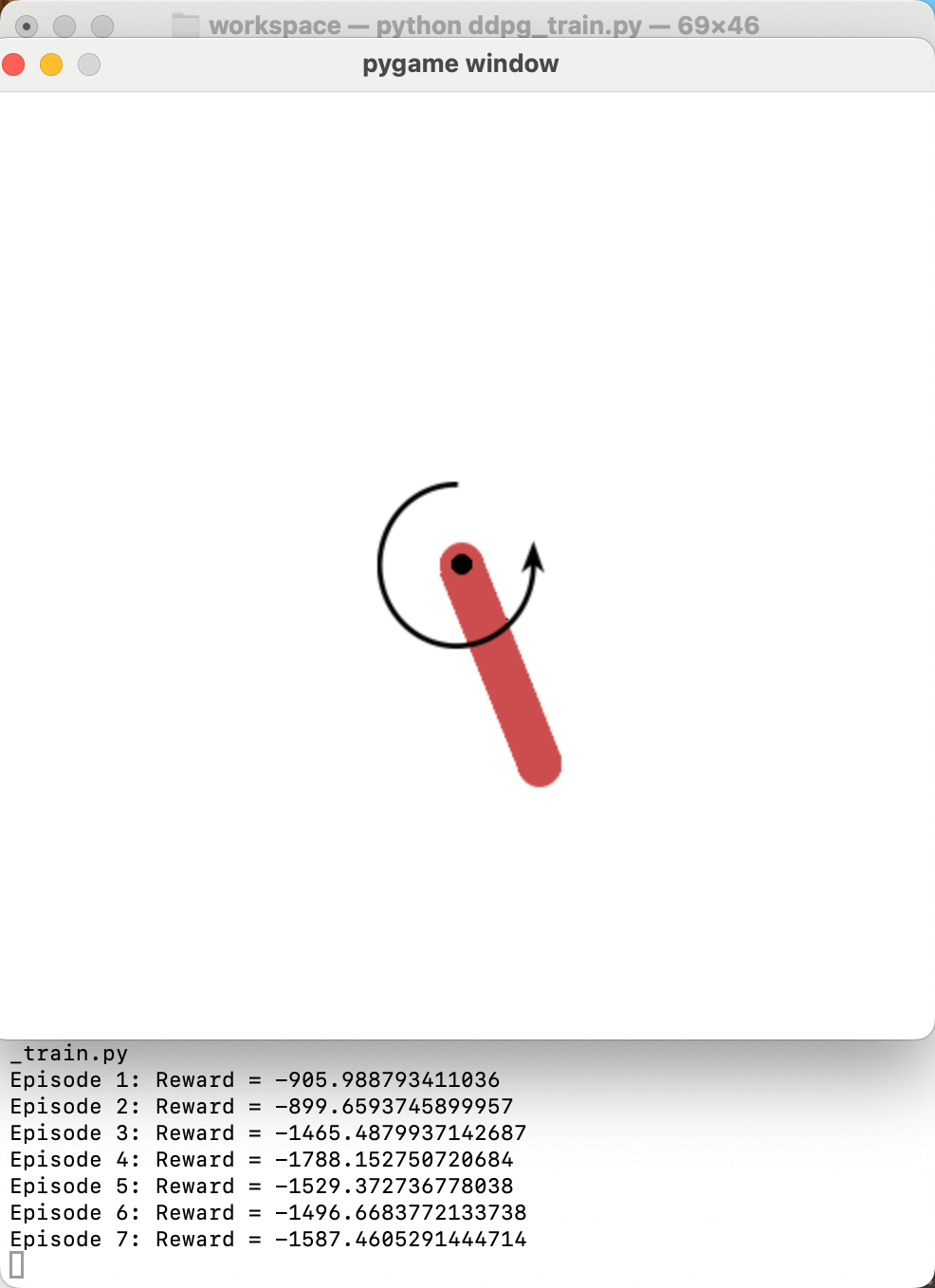
从运行结果可以看到,代码成功启动了训练流程:
首先初始化了 Gym 环境(这里默认使用 Pendulum-v1 环境,即 “倒立摆” 任务);
然后输出每一轮的训练奖励(Reward),随着训练轮次增加,奖励逐渐提升,说明模型正在不断优化;
这意味着:我们不仅成功复现了 OpenManus 的环境,还实现了 “需求输入→代码生成→代码运行” 的全流程闭环!