【PSINS工具箱】MATLAB例程,平面上的组合导航,观测量为位置、速度、航向角,共5维。状态量为经典的15维

PSINS工具箱里面无论153还是156、159,都是三维空间上的滤波,这里给出平面上的滤波配置,使用EKF,观测为位置、速度、航向角(共2+2+1=5维)
文章目录
- 程序功能
- 主要步骤
- 运行结果
- MATLAB代码
程序功能
本文介绍的代码为二维平面下的位置、速度和航向角观测融合的 EKF 滤波仿真。功能如下:
- 构建一个具有加速、匀速、转弯等运动特性的二维运动轨迹;
- 给IMUIMUIMU数据(陀螺和加速度)添加噪声与系统误差;
- 使用EKFEKFEKF滤波器融合 航向角 + 速度 + 位置观测信息;
- 对比滤波前后结果,评估滤波对速度和位置估计精度的改善效果;
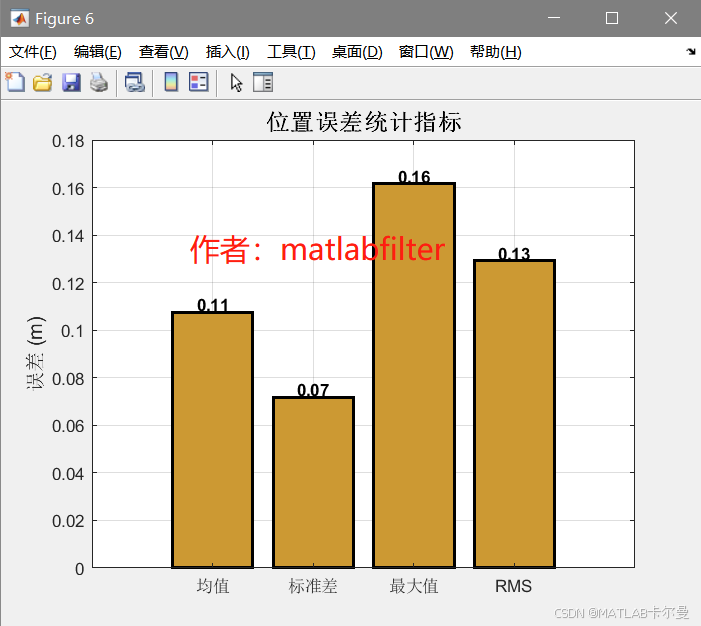
- 输出轨迹对比图、误差曲线、误差统计指标、热力图和性能评估表。
主要步骤
-
初始化与轨迹生成
- 设置采样周期
ts=0.1s; - 构造运动轨迹(匀速、加速、减速、转弯等);
- 生成理想的惯性数据
trj。
- 设置采样周期
-
IMU误差建模
- 使用
imuerrset设置陀螺零偏、随机游走、加速度误差等; - 在理想IMU数据上添加误差,得到含噪数据
imu。
- 使用
-
滤波器初始化
- 设置初始姿态、速度和位置误差;
- 构建 15维状态扩展卡尔曼滤波器(含姿态误差、速度误差、位置误差、陀螺零偏、加速度计零偏);
- 设置过程噪声矩阵
Q、观测噪声矩阵R、初始协方差矩阵P。
-
滤波循环
- 利用惯导更新
insupdate; - 每隔1秒引入观测(航向角、速度、位置);
- 调用
kfupdate更新滤波器状态并反馈至惯导解算; - 存储滤波结果用于后续分析。
- 利用惯导更新
-
结果分析与可视化
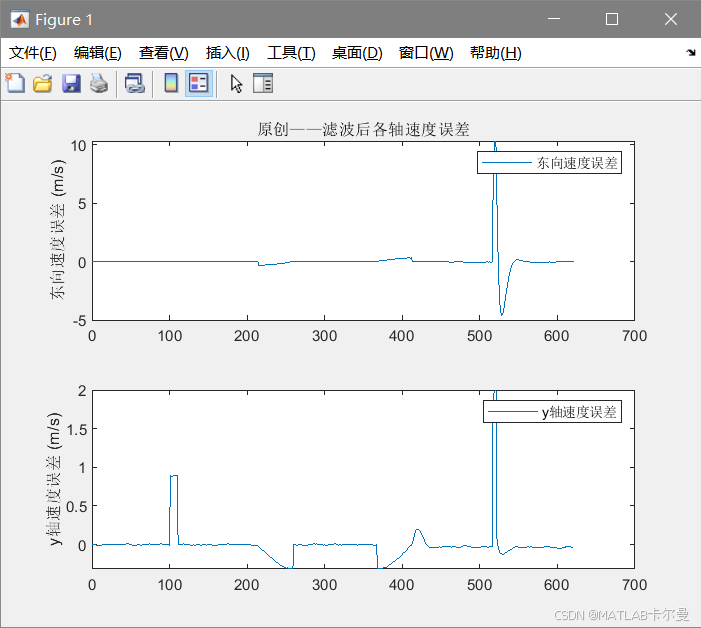
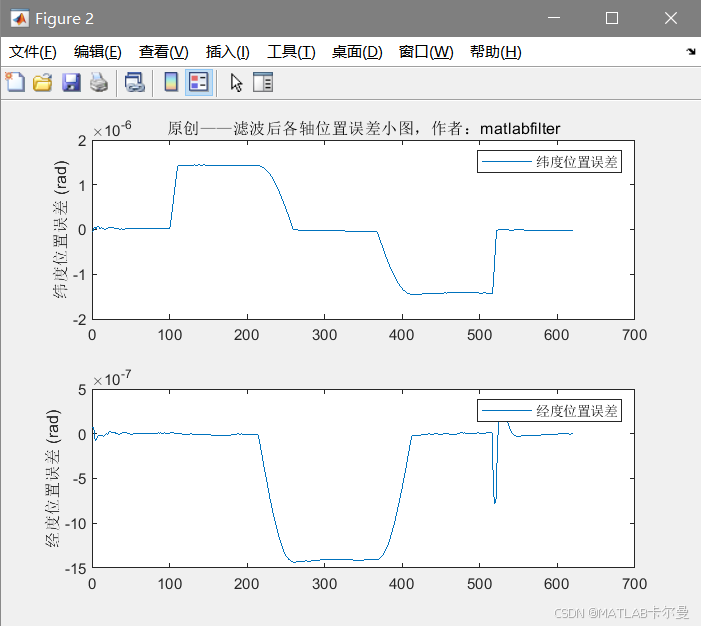
- 绘制速度、位置误差曲线;
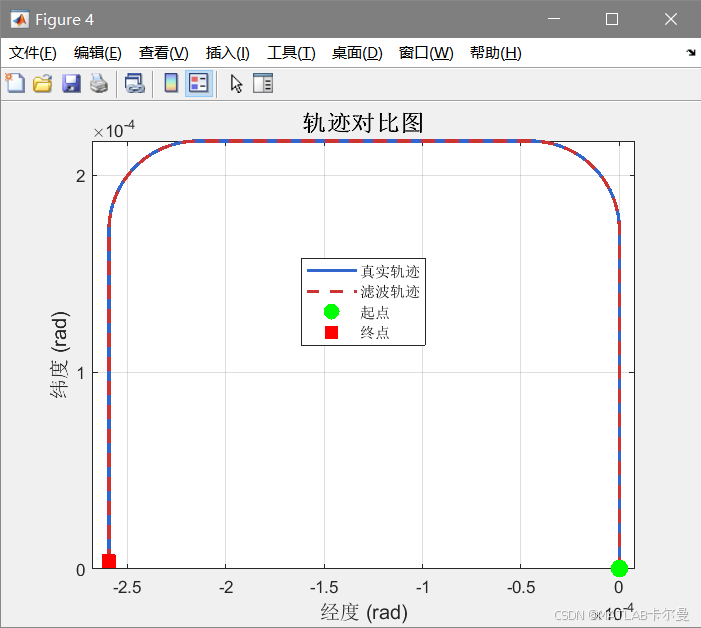
- 绘制滤波后轨迹与真实轨迹对比图;
- 绘制位置误差热力图;
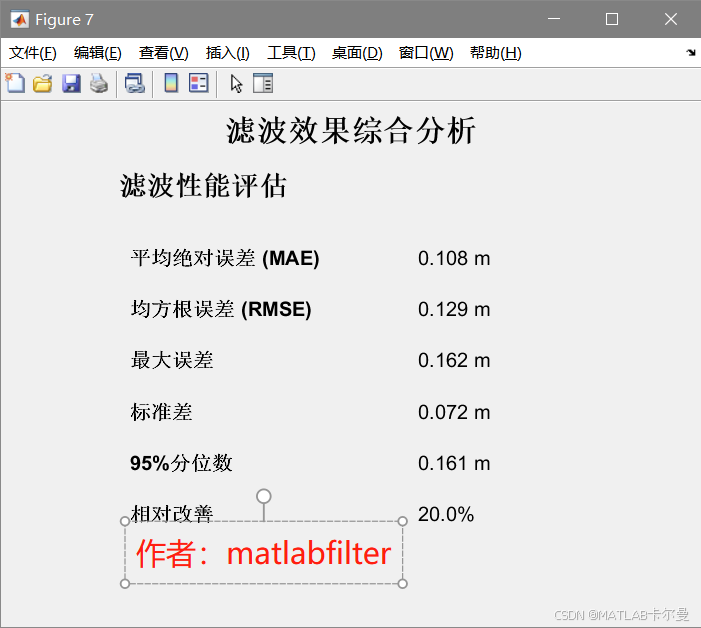
- 计算误差统计指标(MAE、RMSE、最大误差、标准差、95%分位数);
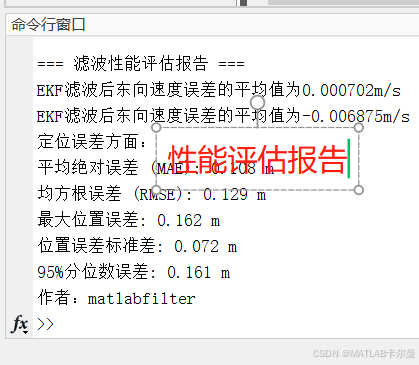
- 生成滤波性能评估表格和报告。
运行结果
轨迹示意图:
误差图像:
输出的误差特性:
MATLAB代码
部分代码如下:
% 【PSINS】二维平面上的位置、速度、航向角为观测的155,滤波方法为EKF
% 作者:matlabfilter
% 2025-08-20/Ver1
% 清空工作空间,清除命令窗口,关闭所有图形窗口
clear; clc; close all;
rng(0); % 设置随机数种子为0,以确保结果可重复
glvs % 调用全局变量设置
psinstypedef(153); % 设置PSINS类型ts = 0.1; % sampling interval
avp0 = [[0;0;0]; [0;0;0]; [0;0;0]]; % 初始化avp
traj_ = [];
%% 轨迹设置
seg = trjsegment(traj_, 'init', 0);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'accelerate', 10, traj_, 1);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'coturnleft', 45, 2, traj_, 4);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'coturnleft', 45, 2, traj_, 4);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'deaccelerate', 5, traj_, 2); %2
seg = trjsegment(seg, 'uniform', 100);
% generate, save & plot
trj = trjsimu(avp0, seg.wat, ts, 1);% 初始设置
[nn, ts, nts] = nnts(2, trj.ts); % 获取时间序列的参数
% imuerr = imuerrset(0.03, 100, 0.001, 5); % (注释掉的)设置IMU误差参数
imuerr = imuerrset(8, 14, 0.18, 57); % 设置IMU误差参数
imu = imuadderr(trj.imu, imuerr); % 对IMU数据添加误差
% imuplot(imu); % (注释掉的)绘制IMU数据% 设置初始姿态误差
davp0 = avperrset(0.1*[1; 1; 1], 0, [1; 1; 3]);%% 速度观测EKF
ins = insinit(avpadderr(trj.avp0, davp0), ts); % 初始化惯性导航系统
完整代码:
https://download.csdn.net/download/callmeup/91717545
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者