piecewise jerk算法介绍
piecewise jerk算法介绍
piecewise jerk算法是百度Apollo中的一种用于路径和速度平滑的算法,该算法假设相邻点之间的jerk为常数,基于该假设将平滑问题构建为二次规划问题,调用osqp求解器求解。参考论文为:Optimal Vehicle Path Planning Using Quadratic Optimization for Baidu Apollo Open Platform
优化问题构建
1.优化变量
 其中x表示自变量,在进行路径规划为x为相对于参考线的横向距离lateral,在进行速度规划时x为相对于路径起点的弧长station。
其中x表示自变量,在进行路径规划为x为相对于参考线的横向距离lateral,在进行速度规划时x为相对于路径起点的弧长station。
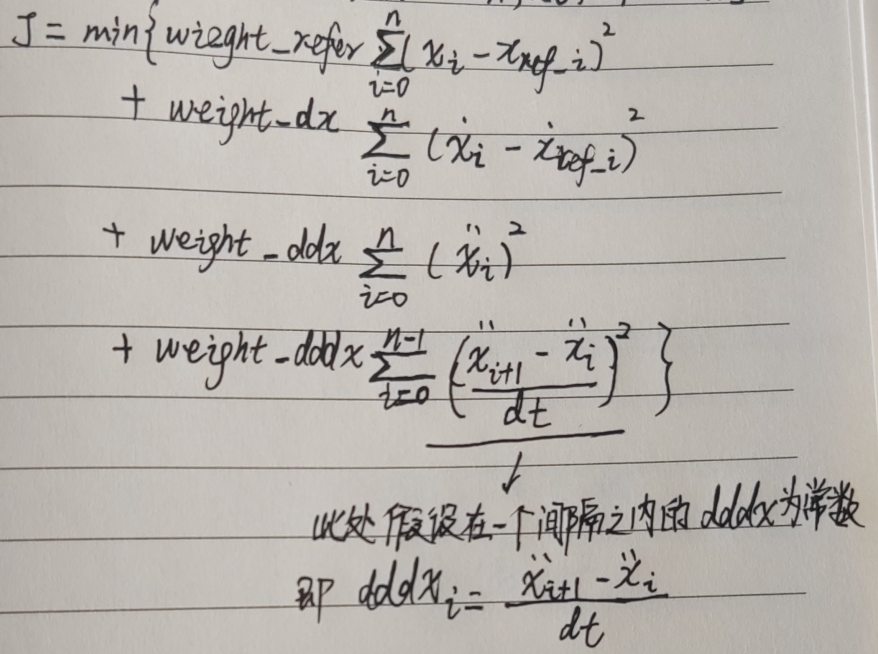
2.目标函数
目标函数主要考虑与参考点的距离和平滑性
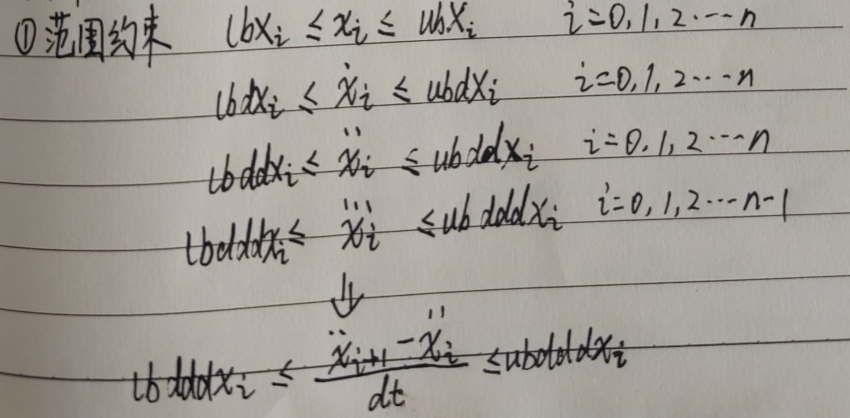
3.约束条件
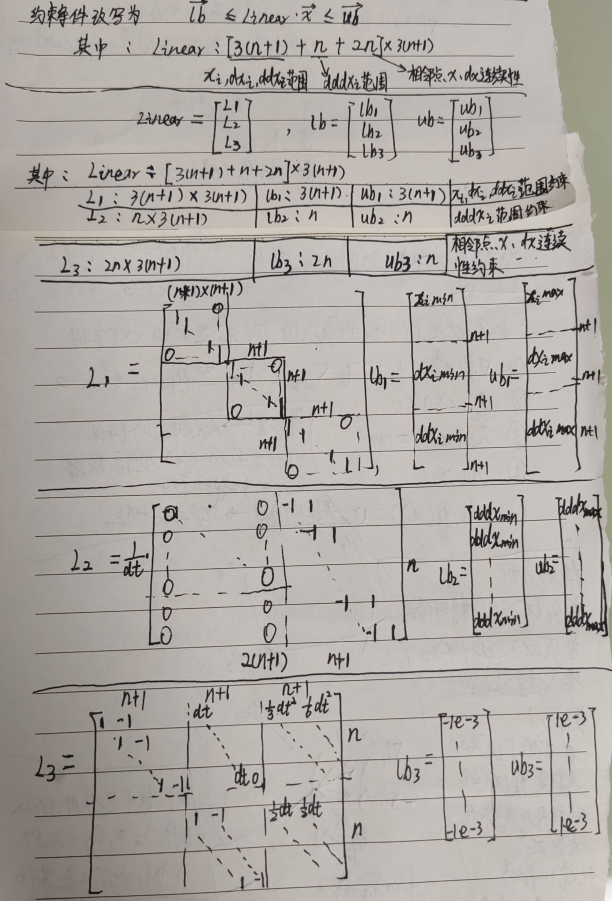
约束条件包含两部分,第一部分为x_i,dx_i,ddx_i,dddx_i的范围约束,在进行路径平滑时表示l_i,l_i’,l_i’‘,l_i’''的范围约束,在进行速度平滑时表示station,velo,acce,jerk的约束范围。
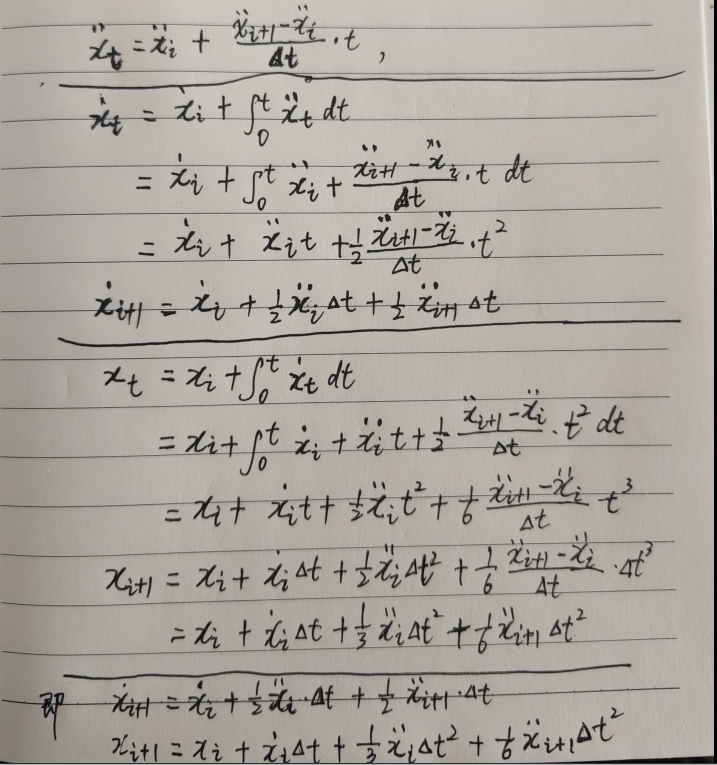
 第二部分为相邻点之间的连续性约束:
第二部分为相邻点之间的连续性约束:
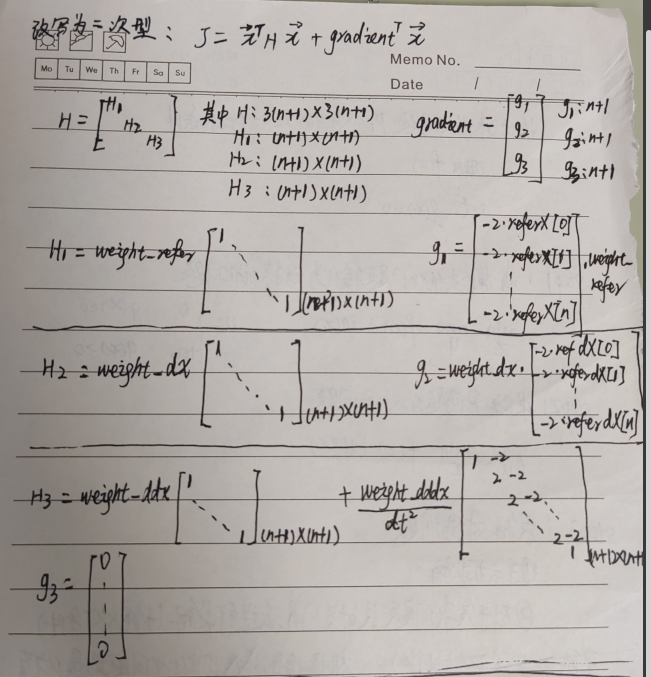
4.修改为二次规划问题
将目标函数修改为二次型
将约束条件修改为矩阵形式: