【Linux系统】进程信号:信号的处理
上一篇文章在介绍完信号的产生和保存后,我们现在对信号有了一个基本的认识,信号由键盘、系统调用、硬件异常、软件条件等方式产生,然后被保存在三张表中,再将信号递达,操作系统有三种处理方式:默认处理、忽略处理、自定义处理。虽然我们现在已经知道这三种处理方式,但是操作系统底层是到底怎么做到在合适的时候处理信号?合适的时候又是什么时候呢?下面我们就来深入了解。
1. 信号捕捉的流程
- 用户态(Ring 3):运行应用程序代码,权限受限
- 内核态(Ring 0):运行操作系统代码,拥有最高权限
- 关键设计:用户自定义函数必须在用户态执行,防止恶意代码获取内核特权
信号捕捉的完整流程
1. 信号处理函数注册
// 用户程序注册SIGQUIT信号的处理函数
signal(SIGQUIT, sighandler);进程通过
signal()或sigaction()系统调用,告诉内核:"当收到 SIGQUIT 信号时,请调用我的sighandler函数"。内核将此信息记录在进程的
task_struct->sighand->action[SIGQUIT]中。
2. 正常执行与信号产生
进程正在用户态执行
main函数中的代码。此时,一个 SIGQUIT 信号产生(例如用户按下了 Ctrl+\)。
内核收到信号,检查目标进程的信号屏蔽字,如果信号未被阻塞,则设置该信号的未决标志。
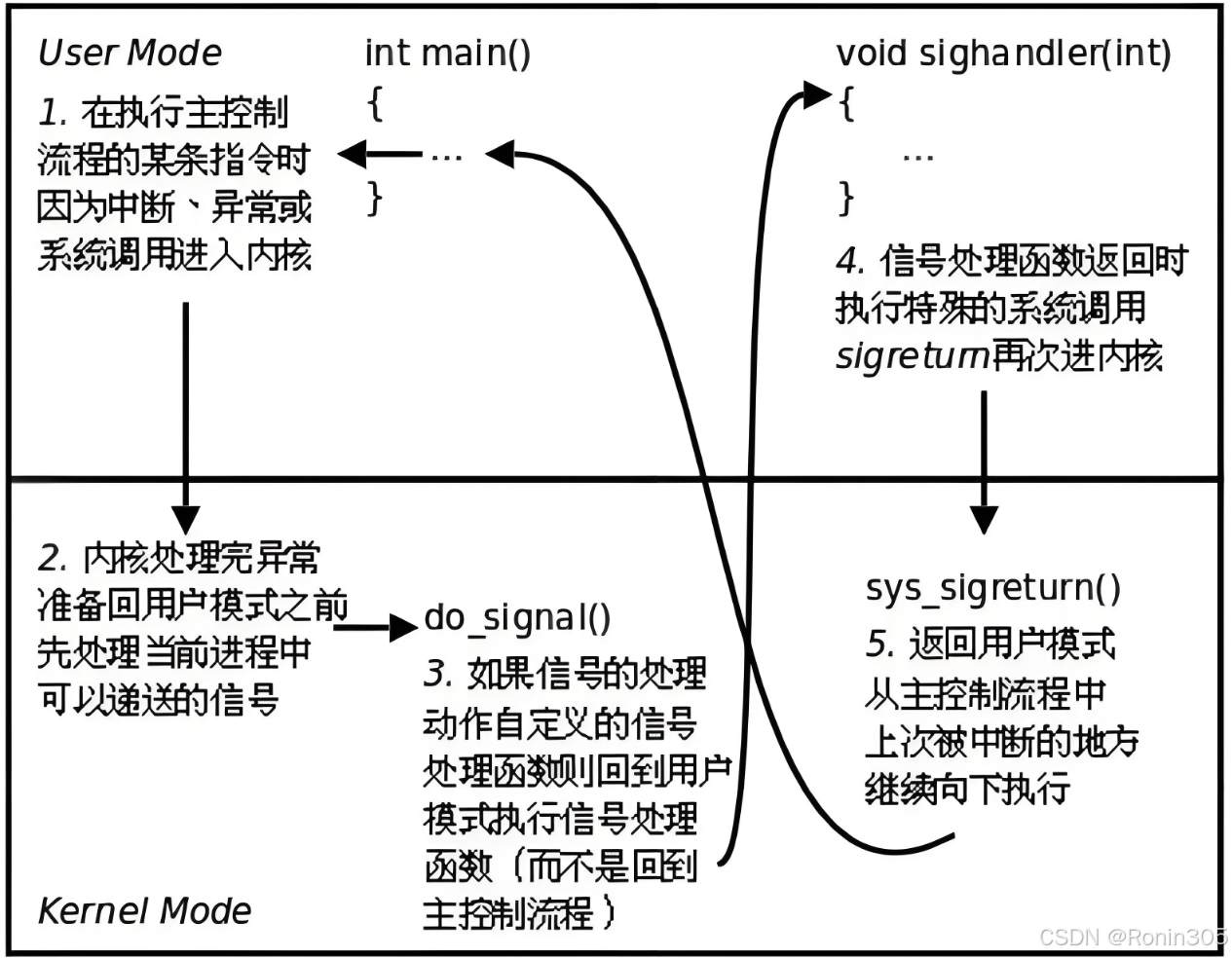
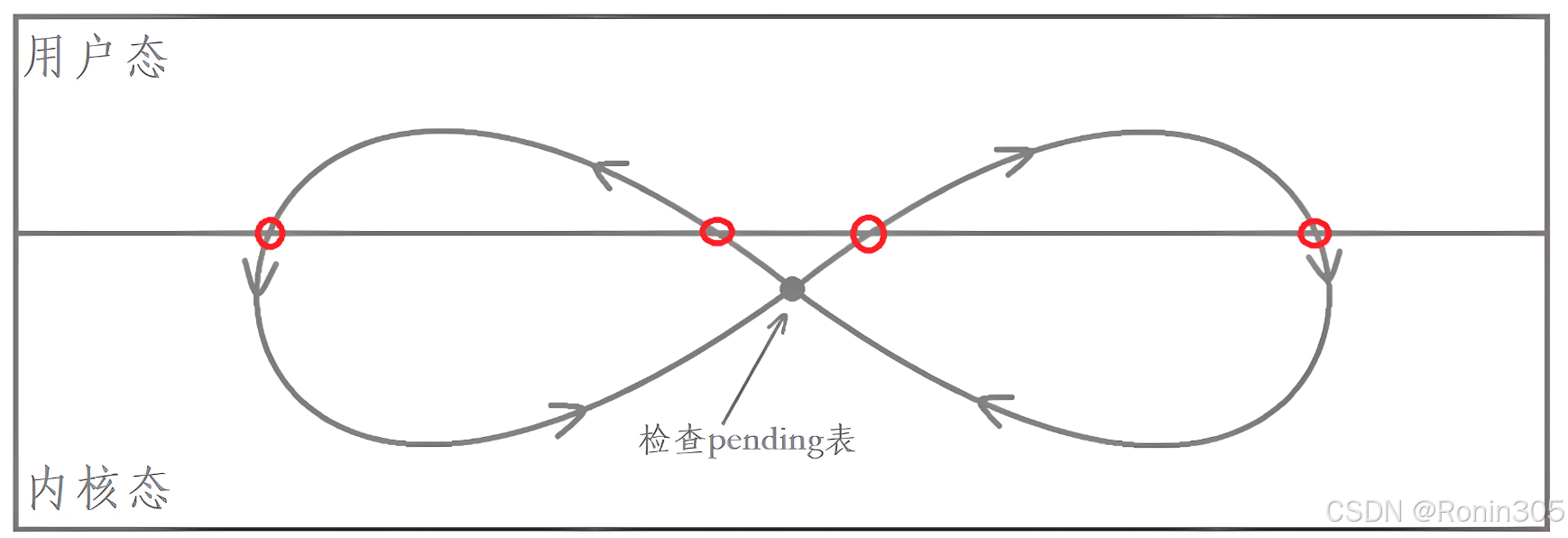
3. 内核态到用户态的返回检查
当进程因系统调用、中断或异常进入内核态,处理完毕后准备返回用户态时,内核会执行一个关键操作:检查当前进程是否有未决的、未被阻塞的信号。
这就是所谓的"在返回用户态之前检查信号"。
4. 信号递达与处理框架构建
如果发现有待处理的信号,且其处理方式是用户自定义函数,内核不会简单地返回原来的用户态执行上下文,而是:
在内核栈中保存完整的用户态上下文,包括所有寄存器状态、指令指针等。
修改用户态栈帧,精心构造一个特殊的栈结构,使得从内核态返回时,CPU 会开始执行信号处理函数。
修改指令指针,使其指向信号处理函数
sighandler的地址。安排返回用户态后首先执行
sighandler函数。
5. 执行信号处理函数
进程返回用户态,但不再是继续执行
main函数,而是开始执行sighandler。sighandler与main函数使用不同的栈帧,它们是两个独立的控制流。信号处理函数在一个特殊的上下文中运行,它可以看到信号编号作为参数,但不知道被信号中断的代码执行到了哪里。
6. 信号处理函数返回
当
sighandler执行到return语句时,并不是返回到main函数中被中断的地方。而是执行一个特殊的系统调用
sigreturn()(这通常由 C 库自动处理,对程序员透明)。
7. 恢复原始上下文
sigreturn()系统调用再次进入内核态。内核从之前保存的上下文信息中恢复原来的用户态栈帧和寄存器状态。
内核清除信号处理相关的临时数据结构。
8. 返回正常执行
如果没有新的信号要递达,内核这次真正地恢复
main函数的上下文。进程继续从原来被信号中断的地方执行,就像什么都没有发生过一样。
关键技术细节
1. 内核栈与用户栈的协作
内核需要精心管理两种栈:
内核栈:存储内核态执行时的数据,包括保存的用户态上下文。
用户栈:信号处理函数
sighandler在执行时使用的栈。
内核会在用户栈上构建一个特殊的帧(Frame),使得信号处理函数能够正常执行并在返回时调用 sigreturn。
2. sigreturn 系统调用的重要性
sigreturn 是信号处理机制中的关键环节,它的作用是:
通知内核信号处理已经完成
让内核恢复之前保存的上下文
清理为信号处理设置的临时结构
3. 信号处理函数的限制
由于信号处理函数的执行上下文特殊,它受到很多限制:
只能调用异步信号安全的函数(如
write,但不能调用printf、malloc等)需要避免处理全局数据时的竞态条件
应该尽量简单快速地执行完毕
四重状态切换的本质
| 切换点 | 方向 | CPU特权级 | 触发机制 | 目的 |
|---|---|---|---|---|
| 1 (用户→内核) | 系统调用/中断 | 3→0 | 硬件中断指令 | 进入内核处理事件 |
| 2 (内核→用户) | 执行handler | 0→3 | 内核修改CS:EIP | 安全执行用户代码 |
| 3 (用户→内核) | 调用sigreturn | 3→0 | 软中断(int 0x80) | 返回内核恢复上下文 |
| 4 (内核→用户) | 恢复主程序 | 0→3 | 恢复原CS:EIP | 继续执行被中断代码 |
💡 为什么需要四次切换?
若直接从内核态执行用户函数:
- 危险:用户代码可能破坏内核栈
- 失控:无法保证返回路径安全
2. sigaction函数详解
sigaction 是 Linux/UNIX 系统中用于精细控制信号行为的核心系统调用,相比传统的 signal() 函数,它提供了更强大的功能(如信号屏蔽、附加数据传递)和更可靠的行为。
函数原型
#include <signal.h>int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact);参数说明
signum:要操作的信号编号(如SIGINT,SIGTERM等)act:指向struct sigaction的指针,包含新的信号处理配置
如果为
NULL,则不改变信号的处理方式
oldact:指向struct sigaction的指针,用于保存信号先前的处理配置
如果为
NULL,则不保存旧配置
返回值
成功时返回
0失败时返回
-1并设置errno
struct sigaction 结构体
这是 sigaction 函数的核心,它包含了信号处理的完整配置:
struct sigaction {void (*sa_handler)(int); // 简单的信号处理函数void (*sa_sigaction)(int, siginfo_t *, void *); // 高级信号处理函数sigset_t sa_mask; // 在执行处理函数期间要阻塞的信号集int sa_flags; // 修改信号行为的标志位void (*sa_restorer)(void); // 已废弃,不应使用
};关键字段详解
1. 信号处理函数选择
sa_handler 和 sa_sigaction 实际上是同一个联合体的不同字段,只能使用其中一个:
sa_handler:简单的信号处理函数,只接收信号编号作为参数void handler(int sig) {// 处理信号 }sa_sigaction:高级信号处理函数,接收更多信息void handler(int sig, siginfo_t *info, void *ucontext) {// 可以访问更多关于信号的信息 }使用哪个函数由
sa_flags中的SA_SIGINFO标志决定。
2. sa_mask - 执行处理函数期间阻塞的信号
指定在信号处理函数执行期间,额外需要阻塞的信号集合
即使没有明确指定,当前正在处理的信号也会被自动阻塞
这可以防止信号处理函数被同一信号重入(递归调用)
工作流程:
- 内核自动将
sa_mask中的信号添加到进程的阻塞信号集 - 处理函数结束后自动恢复原阻塞集
- 内核自动将
3. sa_flags - 行为标志位
通过位掩码组合来修改信号行为,常用标志包括:
| 标志 | 说明 |
|---|---|
SA_SIGINFO | 使用 sa_sigaction 而不是 sa_handler 作为处理函数 |
SA_RESTART | 被信号中断的系统调用自动重启(推荐设置) |
SA_NOCLDSTOP | 如果 signum 是 SIGCHLD,当子进程停止时不接收通知 |
SA_NOCLDWAIT | 如果 signum 是 SIGCHLD,不创建僵尸进程 |
SA_NODEFER | 在执行处理函数期间不自动阻塞当前信号(不推荐) |
SA_RESETHAND | 信号处理完成后重置为默认动作(类似 signal() 的不可靠行为) |
siginfo_t 结构体(当使用 SA_SIGINFO 时)
当设置了 SA_SIGINFO 标志时,信号处理函数可以接收更多信息:
siginfo_t {int si_signo; // 信号编号int si_errno; // 错误号(如果有)int si_code; // 信号来源代码pid_t si_pid; // 发送信号的进程IDuid_t si_uid; // 发送信号的进程的真实用户IDvoid *si_addr; // 导致错误的内存地址(对于SIGSEGV等)int si_status; // 退出值或信号(对于SIGCHLD)// ... 其他字段
}与 signal() 的区别
| 特性 | signal() | sigaction() |
|---|---|---|
| 可移植性 | 不同系统行为不一致 | POSIX 标准,行为一致 |
| 控制精度 | 有限 | 精细控制 |
| 信号阻塞 | 自动阻塞当前信号 | 可自定义阻塞信号集 |
| 系统调用重启 | 依赖具体实现 | 可通过 SA_RESTART 明确控制 |
| 信号信息 | 只能获取信号编号 | 可获取详细信息(siginfo_t) |
| 推荐程度 | 已过时,不推荐在新代码中使用 | 现代程序的首选 |
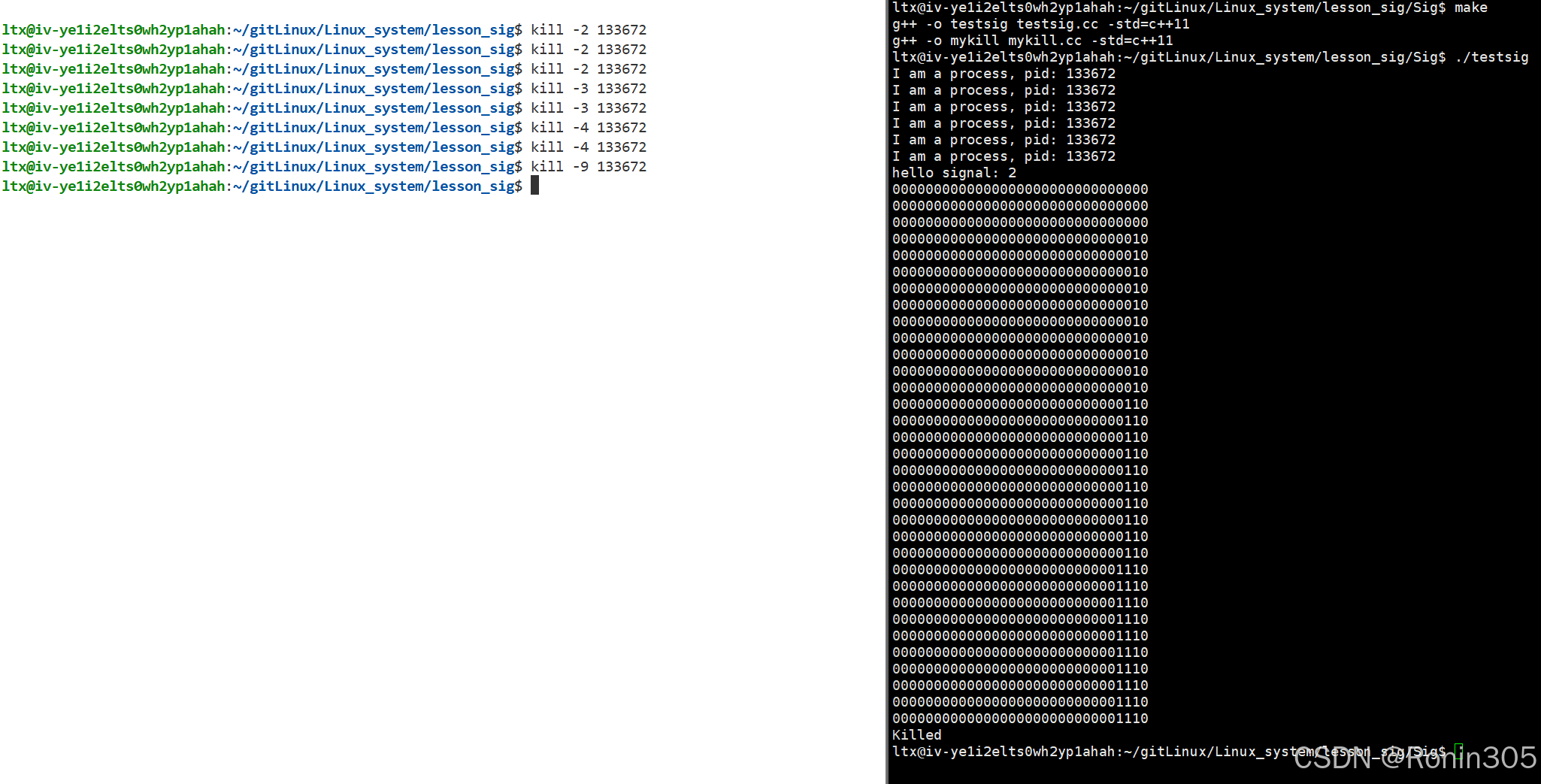
示例:
void handler(int signum)
{std::cout << "hello signal: " << signum << std::endl;while(true){//不断获取pending表!sigset_t pending;sigpending(&pending);for(int i = 31; i >= 1; i--){if(sigismember(&pending, i))std::cout << "1";elsestd::cout << "0";}std::cout << std::endl;sleep(1);}exit(0);
}int main()
{struct sigaction act, oldact;act.sa_handler = handler;sigemptyset(&act.sa_mask);sigaddset(&act.sa_mask, 3);sigaddset(&act.sa_mask, 4);act.sa_flags = 0;// 默认信号处理逻辑sigaction(SIGINT, &act, &oldact); // 对2号信号进行捕捉while(true){std::cout << "I am a process, pid: " << getpid() << std::endl;sleep(1);}return 0;
}将3号和4号信号加入到阻塞表中,使用 sigaction 来捕获 SIGINT 信号,第一次捕获2号信号时,会执行我们自定义函数handler,所以第一次捕获到2号信号时,pending表中2号信号并不处于未决状态,因为已经在执行自定义函数了,然后会在handler中死循环获取pending表,所以我们后续不断发送2号,3号和4号信号时,都会被屏蔽,也就是阻塞住,那么pending表中这些信号就会因为阻塞处于未决状态。
运行结果:
总结:
在Linux信号处理机制中,当进程捕获到某个信号并触发其处理函数时,内核会自动执行以下重要操作:
- 信号屏蔽机制
- 内核首先将该信号自动加入进程的信号屏蔽字(signal mask)
- 这种设计确保了在处理某个信号期间,如果同类型信号再次产生,会被阻塞直到当前处理完成
- 这种机制有效避免了信号处理函数的递归调用问题
- 扩展屏蔽功能(sa_mask字段)
- 通过sigaction结构的sa_mask字段,可以指定需要额外屏蔽的信号集
- 这些被屏蔽的信号会在信号处理期间被暂时阻塞
- 处理函数返回时,系统会自动恢复原先的信号屏蔽字状态
- 示例:处理SIGINT时可能需要同时屏蔽SIGQUIT
- 其他字段说明
- sa_flags:包含控制信号处理行为的各种选项标志
- 常见选项包括SA_RESTART(中断系统调用自动重启)
- 本节示例代码中统一设为0表示使用默认行为
- sa_sigaction:用于实时信号处理的扩展函数指针
- 与标准信号处理函数sa_handler互斥
- 提供更丰富的信号上下文信息(如发送者PID)
- 本章不涉及实时信号的详细处理机制
补充说明:
- 这种自动屏蔽机制对于保证信号处理的原子性至关重要
- 典型应用场景:在信号处理函数中修改全局变量时避免竞态条件
- 错误示例:若未屏蔽相关信号,处理SIGALRM时再次收到SIGALRM可能导致处理函数重入
3. 操作系统是怎么运行的
3.1 硬件中断
硬件中断的本质
什么是硬件中断?
硬件中断是外部设备(如键盘、磁盘、网卡)向CPU发出的信号,表示需要处理某个事件或请求服务。这是一种异步事件,可以在任何时候发生,打断CPU当前正在执行的任务,其核心目的是避免CPU轮询外设造成的资源浪费。
基本概念
中断请求(IRQ):硬件设备发出的中断信号
中断向量:唯一标识中断类型的编号
中断处理程序:对应每个中断向量的处理函数
中断控制器:管理和优先级排序多个中断请求的硬件
触发原理:
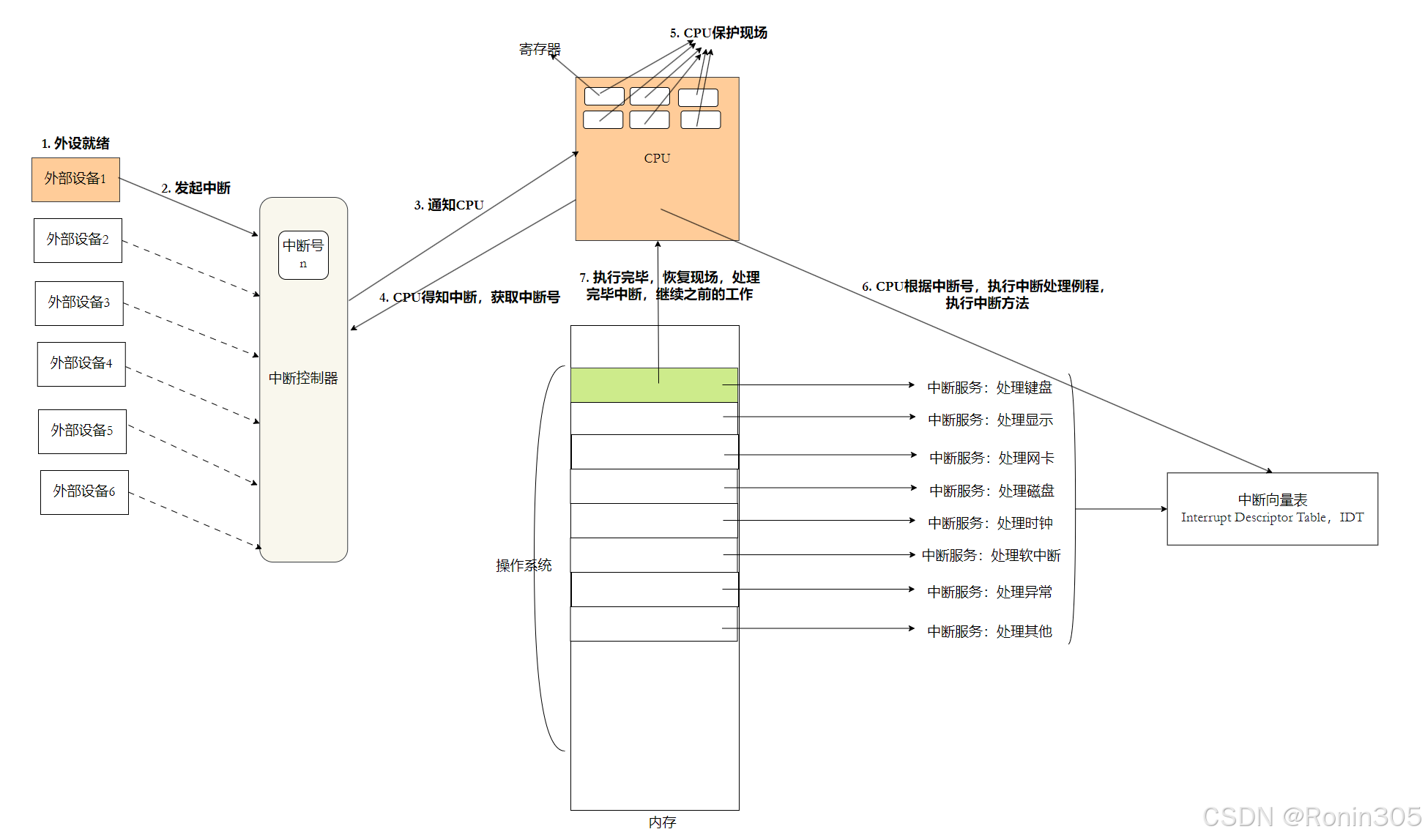
当设备完成操作(如磁盘读取结束)或状态变化(如按键按下),通过 中断控制器(如8259A) 向CPU发送中断请求(IRQ)。
硬件协作流程:
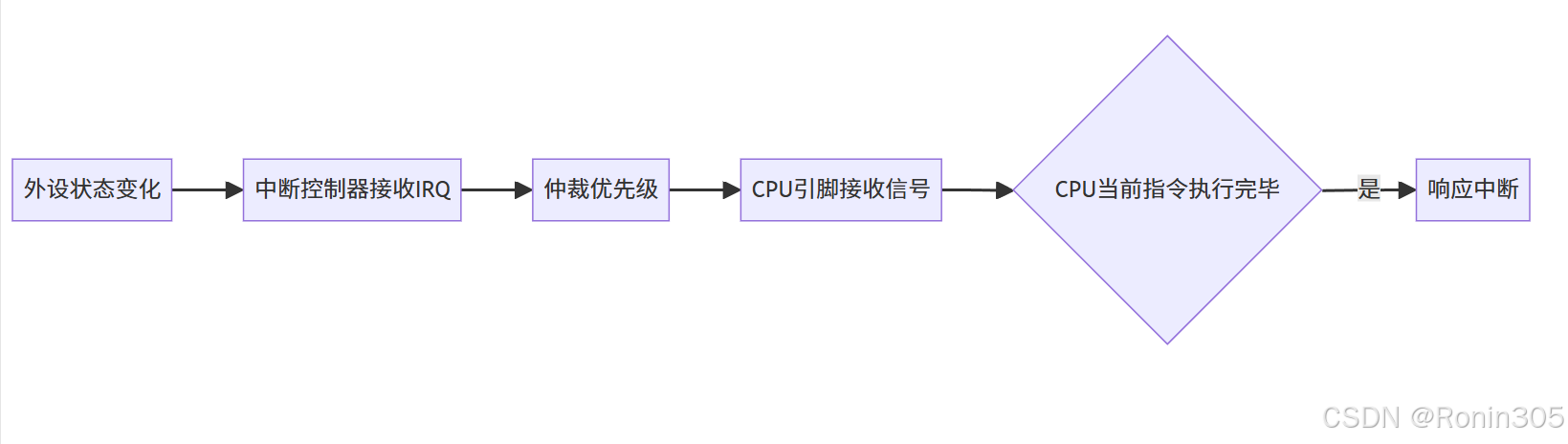
📌 关键设计:CPU仅在指令边界检查中断,确保指令原子性。
中断向量表:操作系统的中断调度中枢
中断向量表(IDT) 是操作系统启动时加载到内存的数据结构,实现中断号到处理程序的映射。
1. 核心组成与初始化
| 组件 | 作用 | Linux 0.11示例 |
|---|---|---|
| 中断门(Interrupt Gate) | 处理外部硬件中断,自动禁用中断响应 | set_intr_gate(0x24, rs1_interrupt)(串口中断) |
| 陷阱门(Trap Gate) | 处理内部异常(如除零错误),允许嵌套中断 | set_trap_gate(14, &page_fault)(缺页异常) |
| 中断屏蔽寄存器 | 控制中断使能状态 | outb(inb_p(0x21) & \~0x01, 0x21)(开启时钟中断) |
2. 中断号解析机制
- 中断号 = 中断向量表偏移量,如IRQ0(时钟中断)对应向量0x20。
- 中断向量条目包含:
- 处理程序入口地址(
&timer_interrupt) - CPU状态字(权限级别、栈指针等)。
- 处理程序入口地址(
//Linux内核0.11源码
void trap_init(void)
{int i;set_trap_gate(0,÷_error);// 设置除操作出错的中断向量值。以下雷同。set_trap_gate(1,&debug);set_trap_gate(2,&nmi);set_system_gate(3,&int3); /* int3-5 can be called from all */set_system_gate(4,&overflow);set_system_gate(5,&bounds);set_trap_gate(6,&invalid_op);set_trap_gate(7,&device_not_available);set_trap_gate(8,&double_fault);set_trap_gate(9,&coprocessor_segment_overrun);set_trap_gate(10,&invalid_TSS);set_trap_gate(11,&segment_not_present);set_trap_gate(12,&stack_segment);set_trap_gate(13,&general_protection);set_trap_gate(14,&page_fault);set_trap_gate(15,&reserved);set_trap_gate(16,&coprocessor_error);// 下⾯将int17-48 的陷阱⻔先均设置为reserved,以后每个硬件初始化时会重新设置⾃⼰的陷阱⻔。for (i=17;i<48;i++)set_trap_gate(i,&reserved);set_trap_gate(45,&irq13);// 设置协处理器的陷阱⻔。outb_p(inb_p(0x21)&0xfb,0x21);// 允许主8259A 芯⽚的IRQ2 中断请求。outb(inb_p(0xA1)&0xdf,0xA1);// 允许从8259A 芯⽚的IRQ13 中断请求。set_trap_gate(39,¶llel_interrupt);// 设置并⾏⼝的陷阱⻔。
}
void rs_init (void)
{set_intr_gate (0x24, rs1_interrupt); // 设置串⾏⼝1 的中断⻔向量(硬件IRQ4信号)。set_intr_gate (0x23, rs2_interrupt); // 设置串⾏⼝2 的中断⻔向量(硬件IRQ3信号)。init (tty_table[1].read_q.data); // 初始化串⾏⼝1(.data 是端⼝号)。init (tty_table[2].read_q.data); // 初始化串⾏⼝2。outb (inb_p (0x21) & 0xE7, 0x21); // 允许主8259A 芯⽚的IRQ3,IRQ4 中断信号请求。
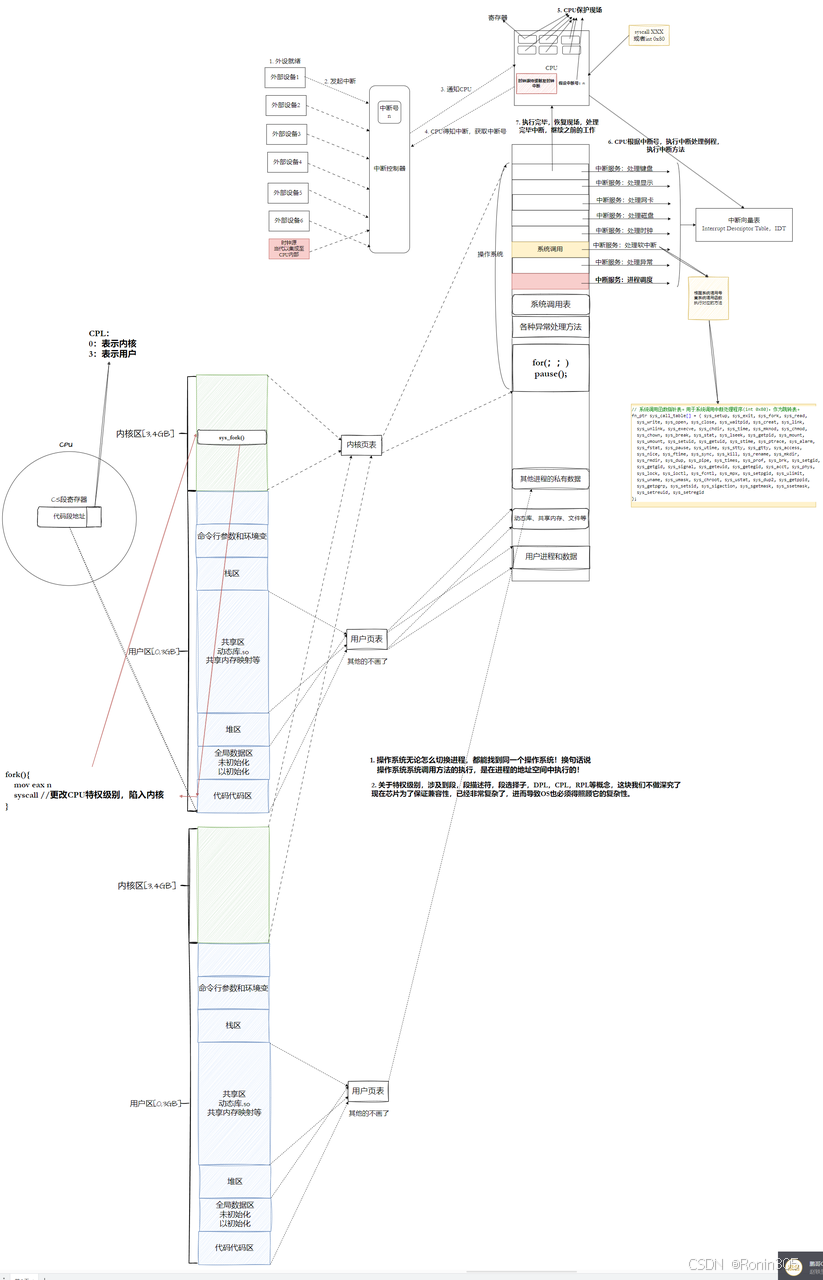
}完整处理流程图:
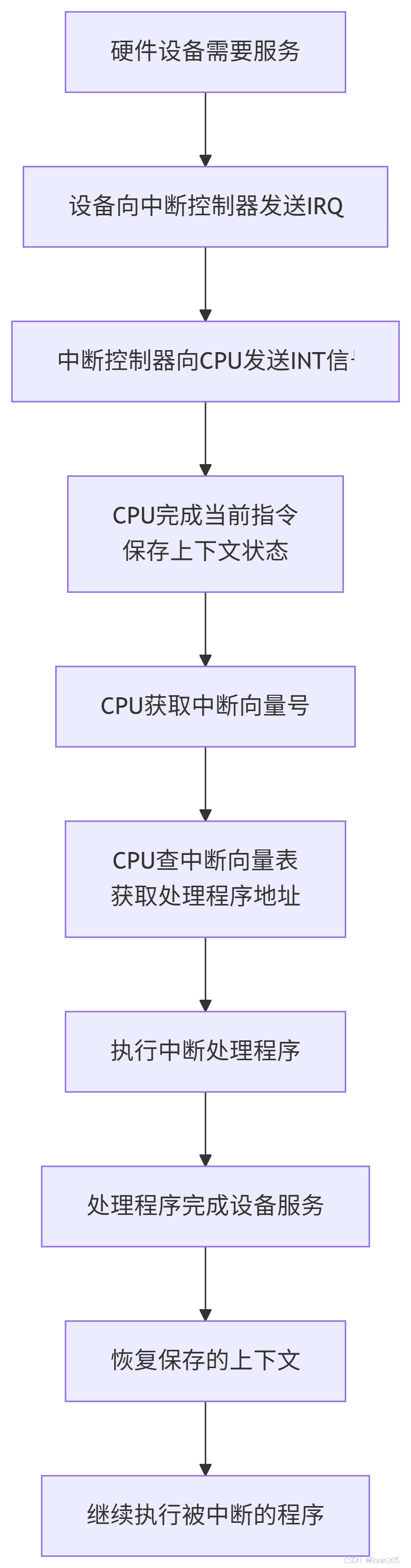
CPU中断响应全流程深度解析
一、中断触发阶段:从请求到CPU感知
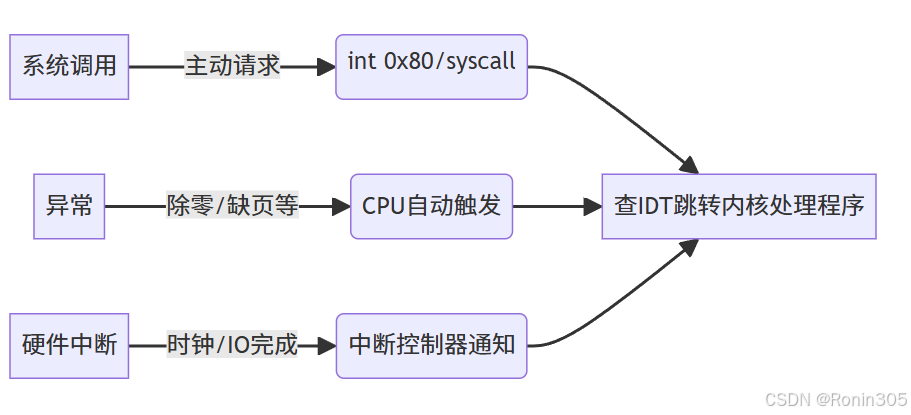
1. 中断请求的产生
中断源分类:
- 外部硬件中断:由外设(如键盘、磁盘、网卡)通过物理引脚(IRQ)发出请求。
- 内部异常:CPU执行指令时触发(如除零错误、缺页异常)。
- 软中断:由程序主动发起(如
int 0x80系统调用)。
中断控制器的仲裁:
中断请求首先送达中断控制器(如8259A或APIC),进行优先级仲裁: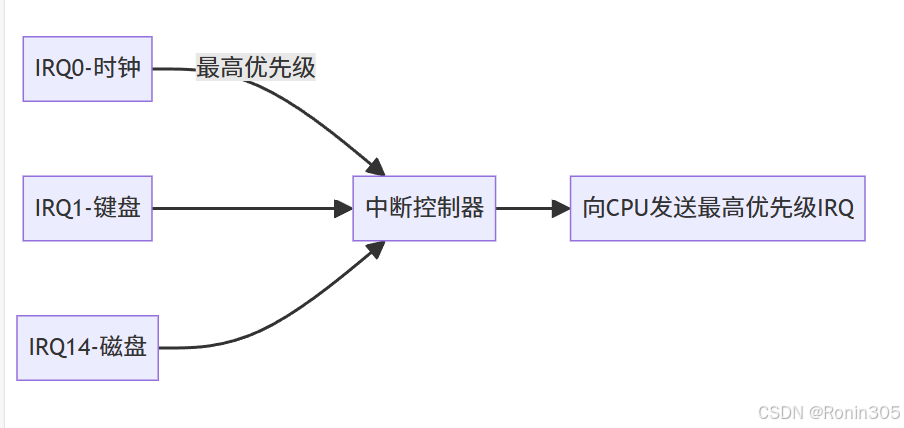
控制器通过菊花链或并行仲裁确定优先级。
2. CPU的响应条件
CPU仅在同时满足以下条件时响应中断:
- 当前指令执行完毕:确保指令原子性。
- 中断未被屏蔽:
- 全局中断使能标志
IF=1(x86的STI指令开启)。 - 该中断在中断屏蔽寄存器(IMR)中未被禁用。
- 全局中断使能标志
- 无更高优先级中断处理中:避免嵌套中断导致状态混乱。
📌 关键细节:x86架构中,
NMI(不可屏蔽中断)无视IF标志,用于处理硬件故障等紧急事件。
二、硬件自动操作:上下文保存与跳转
1. 现场保护(由CPU微码自动完成)
当CPU决定响应中断时,硬件依次执行:
压栈保护关键寄存器:
- 程序计数器(PC/IP) :保存下一条待执行指令地址(断点)。
- 程序状态字(PSW/FLAGS) :保存当前CPU状态(如中断使能位)。
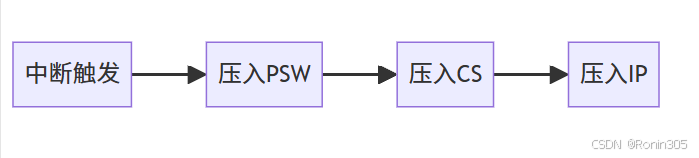
⚠️ 此过程无需软件介入,由CPU硬件直接完成。
关闭中断响应:
自动清除IF标志(CLI等效操作),防止同级中断干扰。
2. 跳转至中断处理程序
- 查询中断向量表(IDT):
CPU根据中断向量号(如0x20对应时钟中断),在IDT中定位处理程序入口地址。 - 加载入口地址:
将CS:IP设置为中断服务程序(ISR)的入口,开始执行ISR。
🔧 操作系统角色:启动时初始化IDT,例如Linux 0.11绑定时钟中断:
set_intr_gate(0x20, &timer_interrupt); // 0x20向量→timer_interrupt
三、中断服务阶段:操作系统的接管与处理
1. 保存完整上下文(操作系统责任)
ISR首先保存所有可能被破坏的寄存器,确保主程序状态无损:
; x86示例
pushad ; 保存通用寄存器
push ds
push es ; 保存段寄存器
此步骤由操作系统编写,需覆盖所有架构相关寄存器。
2. 中断服务程序(ISR)的核心逻辑
设备交互:
- 读取设备状态寄存器(如键盘扫描码端口
0x60)。 - 清除设备中断请求标志。
- 读取设备状态寄存器(如键盘扫描码端口
通知中断控制器:
发送EOI(End of Interrupt)信号:outb(0x20, 0x20); // x86 8259A的EOI唤醒关联任务:
若中断关联进程(如磁盘I/O完成),调用wake_up()唤醒等待队列。触发软中断(可选):
将耗时操作移交软中断线程(如Linux的ksoftirqd)。
3. 中断嵌套管理
允许嵌套的条件:
sti(); // 显式开启中断,允许高优先级中断抢占需谨慎控制嵌套深度,避免栈溢出。
嵌套现场保护:
每次嵌套需独立保存上下文,形成中断栈帧链。
四、中断返回:恢复与继续执行
1. 恢复现场
弹出寄存器:
pop es pop ds popad ; 恢复通用寄存器执行返回指令:
iret指令自动从栈中恢复IP、CS、PSW。
2. 返回主程序
CPU根据恢复的PC值继续执行被中断的指令流,如同未发生中断。
一张图总结:
3.2 时钟中断
问题
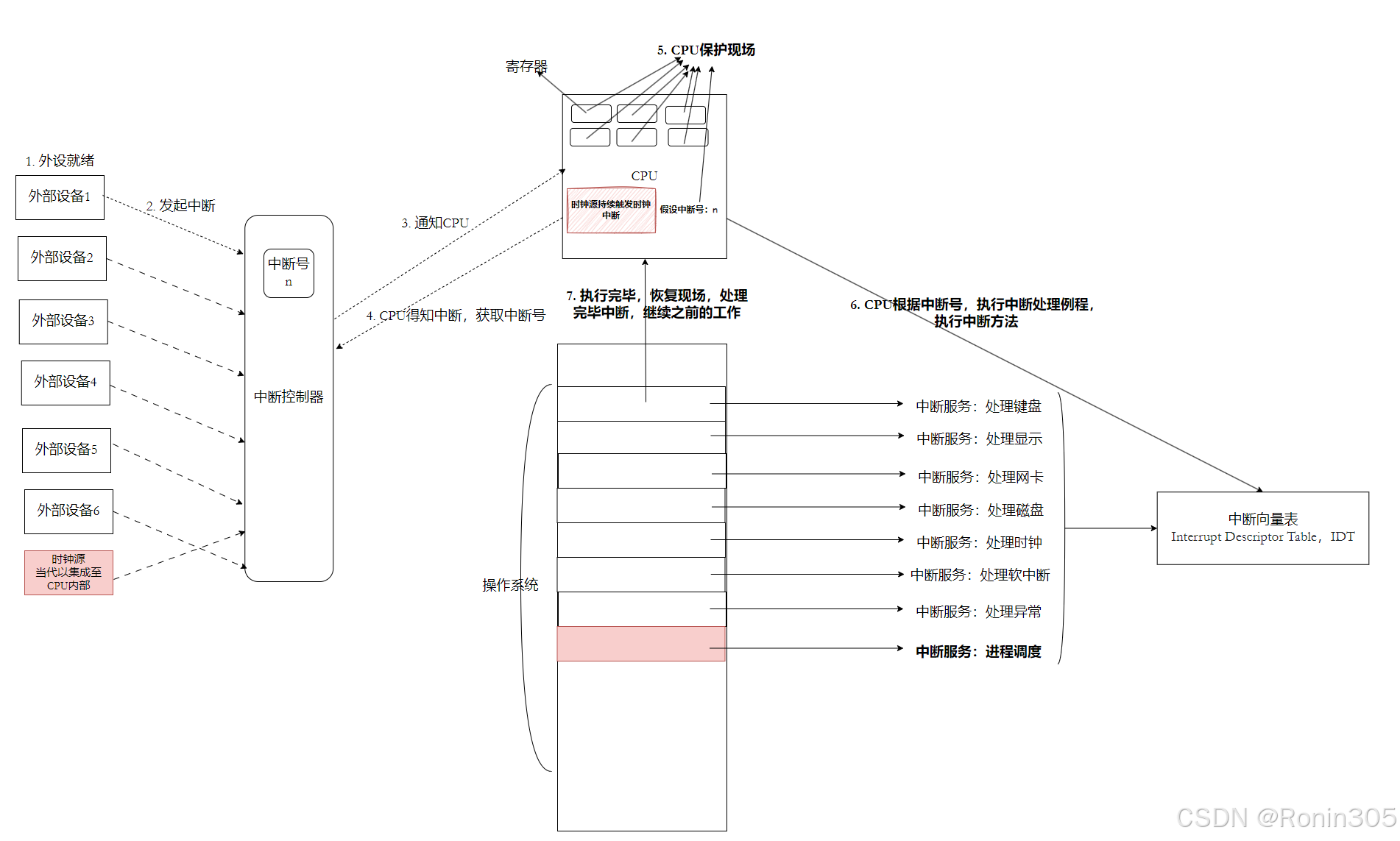
• 操作系统自己被谁指挥,被谁推动执行?
答案:操作系统被时钟中断指挥和推动执行。
操作系统不是一个主动的"管理者",而是一个被动的"响应者"。它通过时钟中断这个规律性的心跳来获得执行机会,从而进行调度、管理和维护工作。
• 有没有可以定期触发的设备?
答案:有,这就是系统定时器/时钟芯片。
计算机中有专门的硬件定时器(如8253/8254 PIT或HPET),它们能够以固定的频率产生中断信号,这就是时钟中断的来源。
时钟中断的硬件基础
系统定时器硬件
8253/8254 PIT(可编程间隔定时器):传统PC中的定时器芯片
HPET(高精度事件定时器):现代系统中的高精度定时器
APIC定时器:多处理器系统中的本地定时器
定时器工作原理
定时器芯片被编程为以特定频率(如100Hz或1000Hz)生成中断信号。这意味着每秒会产生100次或1000次时钟中断。
Linux 0.11 时钟中断机制详解
初始化过程
// 在sched_init()中设置时钟中断
void sched_init(void) {// ...set_intr_gate(0x20, &timer_interrupt); // 设置时钟中断处理程序outb(inb_p(0x21) & ~0x01, 0x21); // 允许时钟中断(IRQ0)// ...
}时钟中断处理程序
// 汇编代码:timer_interrupt
_timer_interrupt:push %dspush %eaxmovl $0x10, %eaxmov %ax, %dsmovb $0x20, %aloutb %al, $0x20 # 向8259A发送EOI(中断结束)信号movl $0, %eaxincl %eaxmovl %eax, jiffies # 更新系统时钟滴答计数pushl $0x10 # 参数:CPL(当前特权级)call _do_timer # 调用C函数处理定时任务popl %eaxpopl %eaxpop %dsiretdo_timer 函数:核心处理逻辑
// kernel/sched.c
void do_timer(long cpl) {extern int beepcount;extern void sysbeepstop(void);// 更新系统时间if (beepcount)if (!--beepcount)sysbeepstop();// 更新当前进程时间片if (--current->counter > 0)return;// 时间片用完,需要重新调度current->counter = 0;schedule(); // 调用调度程序
}调度函数 schedule
// kernel/sched.c
void schedule(void) {int i, next, c;struct task_struct **p;// 寻找就绪状态且counter值最大的进程while (1) {c = -1;next = 0;i = NR_TASKS;p = &task[NR_TASKS];while (--i) {if (!*--p)continue;if ((*p)->state == TASK_RUNNING && (*p)->counter > c)c = (*p)->counter, next = i;}if (c) break; // 找到了可运行的进程// 所有进程的时间片都已用完,重新分配时间片for (p = &LAST_TASK; p > &FIRST_TASK; --p)if (*p)(*p)->counter = ((*p)->counter >> 1) + (*p)->priority;}// 切换到选中的进程switch_to(next);
}时钟中断的完整工作流程
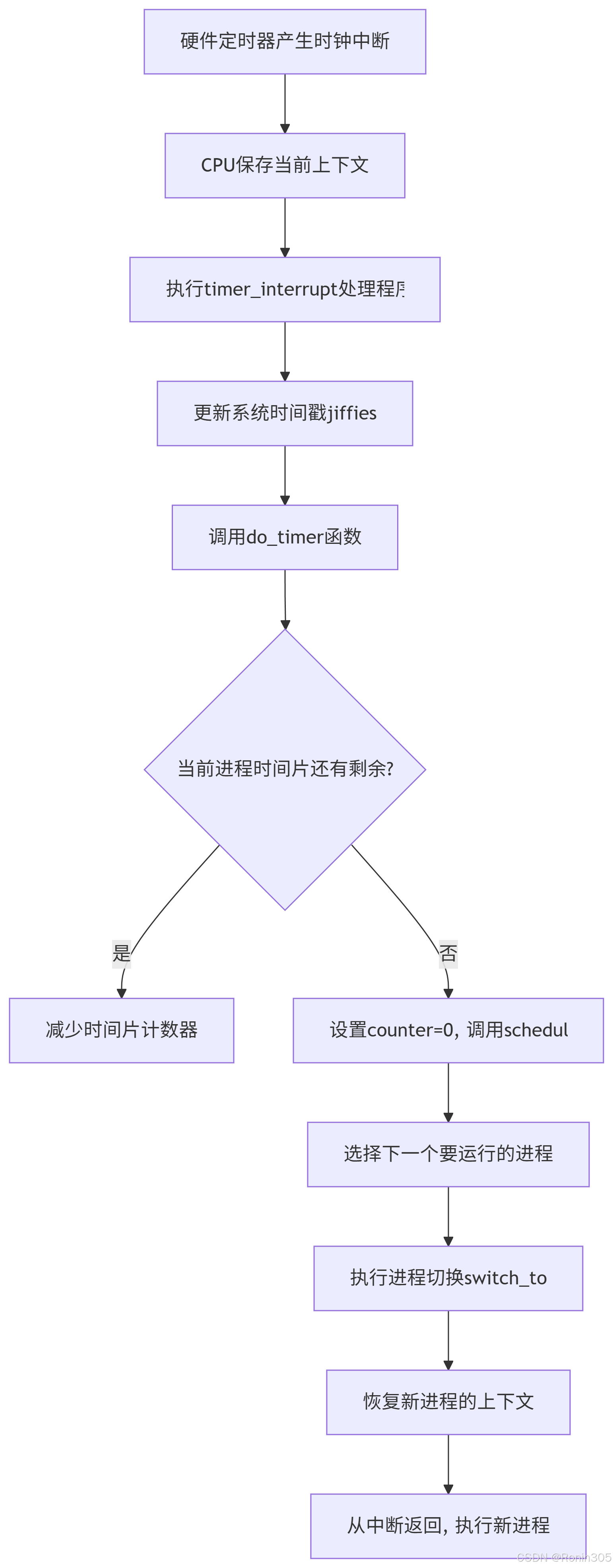
时间片与调度机制
时间片(Time Quantum)
每个进程被分配一个执行时间单位(时间片)
在Linux 0.11中,时间片大小与进程的
counter值相关时钟中断每次发生时,当前进程的
counter减1当
counter减到0时,进程被剥夺CPU使用权
优先级与时间片分配
// 重新计算时间片的公式
(*p)->counter = ((*p)->counter >> 1) + (*p)->priority;这个公式确保:
进程的剩余时间片会继承一半到下一个周期
加上固定的优先级值,保证每个周期都有基本的时间片
优先级高的进程获得更多CPU时间
调度算法演进
原始轮转调度(Linux 0.11):
if (timer++ % 2 == 0) pcb = pcb_A; // 简单交替执行 else pcb = pcb_B;现代O(1)调度器(Linux 2.6+):
- 使用
active/expired双队列避免遍历 - 时间片耗尽时移入
expired队列:if (--current->time_slice <= 0) move_to_expired_queue(current);
- 使用
在前面章节进程调度时,我们对O(1)调度有做过详细介绍
时钟中断的多重角色
时钟中断不仅是进程调度的触发器,还负责:
1. 系统时间维护
通过jiffies变量记录系统启动后的时钟滴答数,维护系统时间。
2. 内核统计信息更新
更新系统负载统计、进程运行时间统计等。
3. 定时器处理
处理内核和进程设置的各种定时器(timer)。
4. 资源监控
监控系统资源使用情况,必要时进行回收或调整。
一张图总结:
3.3 死循环
如果是这样,操作系统不就可以躺平了吗?对,操作系统自己不做任何事情,需要什么功能,就向中断向量表里面添加方法即可。操作系统的本质:就是一个死循环!
Linux 0.11 的主函数结构
void main(void) {// 初始化阶段:设置整个系统的基础设施mem_init(); // 内存管理初始化trap_init(); // 中断向量表初始化blk_dev_init(); // 块设备初始化sched_init(); // 调度器初始化// ... 其他初始化工作// 创建init进程(用户空间的第一个进程)if (!fork()) {init();}// 主循环:操作系统的"休息"状态for (;;) {pause(); // 等待中断发生}
}这个死循环的真正含义
不是忙等待:
pause()系统调用会让CPU进入低功耗状态中断驱动:只有在中断发生时,CPU才会跳出暂停状态
事件响应:操作系统作为中断处理程序的"调度中心"
注意!! 对于任何其它的任务,'pause()'将意味着我们必须等待收到⼀个信号才会返回就绪运⾏态,但任务0(task0)是唯⼀的意外情况(参⻅'schedule()'),因为任务0 在任何空闲时间⾥都会被激活(当没有其它任务在运⾏时),因此对于任务0'pause()'仅意味着我们返回来查看是否有其它任务可以运⾏,如果没有的话我们就回到这⾥,⼀直循环执⾏'pause()'。
pause() 的内部机制
// pause() 的简化实现
int pause(void) {// 将当前进程状态设为可中断睡眠current->state = TASK_INTERRUPTIBLE;// 调用调度器,选择其他进程运行schedule();// 当信号到达时,从这里恢复执行return -EINTR;
}为什么使用 pause() 而不是空循环?
| 方式 | CPU使用率 | 功耗 | 响应速度 |
|---|---|---|---|
空循环(while(1);) | 100% | 高 | 即时 |
pause() | 接近0% | 低 | 依赖中断响应时间 |
示例:时钟中断触发调度
// 当时钟中断发生时
void timer_interrupt(void) {// 更新系统时间jiffies++;// 减少当前进程时间片current->counter--;// 如果时间片用完或需要调度if (current->counter <= 0) {schedule(); // 进程调度}
}在Linux内核的早期版本(如0.11版)中,任务调度机制有一个特殊设计:通常情况下,当任务调用pause()系统调用时,该任务会进入等待状态,直到接收到信号才会返回就绪运行态。但任务0(即内核启动后创建的第一个任务)是一个特例。
具体来说:
对于普通任务:
- 调用
pause()会使任务进入可中断的等待状态(TASK_INTERRUPTIBLE) - 任务会从运行队列中移除
- 必须等待信号唤醒才能重新进入就绪队列
- 调用
对于任务0的特殊处理:
- 当没有其他任务需要运行时,调度器会主动选择任务0
- 任务0的
pause()实现不同:它不会真正进入等待状态 - 而是立即返回,让调度器有机会再次检查是否有其他任务需要运行
- 如果没有其他任务,又回到任务0继续执行
- 这样就形成了一个"空闲循环":pause() -> schedule()检查 -> 若无任务则继续pause()
这种设计的原因:
- 任务0作为系统的空闲任务
- 需要保证CPU时刻都有任务在执行
- 通过这种特殊处理避免了CPU完全空闲的状态
- 同时为后续可能出现的任务提供快速的响应能力
这种机制在内核代码中的具体实现可以参考schedule()函数中的特殊处理逻辑,它会明确检查当前任务是否是任务0,并做出不同的调度决策。
3. 4 软中断
上述外部硬件中断,需要硬件设备通过特定信号线(如IRQ线)触发。例如,当键盘按键被按下时,键盘控制器会通过中断请求线向CPU发送电信号,CPU检测到后会暂停当前任务处理中断。
有没有可能,因为软件原因,也触发上面的逻辑?有!这被称为"软件中断"或"陷阱中断"。这种中断不是由外部设备产生,而是由CPU执行特定指令主动触发。常见的场景包括:
- 除零错误等异常情况
- 调试断点
- 系统调用
为了让操作系统支持进行系统调用,CPU厂商设计了专门的汇编指令:
- x86架构使用int指令(如int 0x80)
- x86_64架构使用syscall/sysenter指令
- ARM架构使用SWI/SVC指令 这些指令会让CPU内部产生中断逻辑,切换到内核模式。
与硬件中断的对比
| 特性 | 硬件中断 | 软中断(系统调用) | 设计意义 |
|---|---|---|---|
| 触发源 | 外设(键盘、磁盘等) | 程序指令(int 0x80) | 用户主动请求内核服务 |
| 可预测性 | 随机性高 | 精确控制触发时机 | 保障程序逻辑完整性 |
| 权限切换 | 自动进入内核态 | 通过指令显式切换 | 安全隔离用户与内核空间 |
软中断的触发原理
- 指令级操作:
- x86架构:
int 0x80或sysenter指令引发CPU异常,向量号128(0x80)对应系统调用入口 。 - ARM架构:
svc(Supervisor Call)指令实现同等效果 。
- x86架构:
问题:
1. 用户层如何传递系统调用号给操作系统?
通过寄存器传递(以x86架构为例)
EAX寄存器是传递系统调用号的主要寄存器:
; 示例:调用write系统调用
mov eax, 4 ; 将write的系统调用号存入EAX
mov ebx, 1 ; 第一个参数:文件描述符(stdout)
mov ecx, buffer ; 第二个参数:缓冲区地址
mov edx, length ; 第三个参数:数据长度
int 0x80 ; 触发软中断不同架构的寄存器使用
| 架构 | 系统调用号寄存器 | 参数寄存器 | 调用指令 |
|---|---|---|---|
| x86 (32位) | EAX | EBX, ECX, EDX, ESI, EDI, EBP | int 0x80 |
| x86-64 | RAX | RDI, RSI, RDX, R10, R8, R9 | syscall |
| ARM | R7 | R0-R6 | svc 0 |
2. 操作系统如何返回结果给用户?
通过寄存器返回简单结果
对于简单的返回值(如整数、指针),操作系统通过EAX/RAX寄存器返回:
// 系统调用处理函数示例
asmlinkage long sys_getpid(void) {return current->pid; // 返回值通过EAX传递给用户程序
}通过用户提供的缓冲区返回复杂数据
对于复杂数据结构或大量数据,操作系统将数据写入用户提供的缓冲区:
// 读取文件数据的系统调用
asmlinkage long sys_read(unsigned int fd, char __user *buf, size_t count) {// ... 从文件读取数据copy_to_user(buf, kernel_buffer, bytes_read); // 将数据复制到用户空间return bytes_read; // 返回实际读取的字节数
}错误处理
系统调用通过两种方式报告错误:
返回负的错误码:通常返回
-errno设置全局errno变量:标准库会将其转换为正数并设置errno
// 用户程序中的错误处理
int fd = open("file.txt", O_RDONLY);
if (fd == -1) {// open系统调用返回-1,标准库设置errnoperror("open failed"); // 输出"open failed: No such file or directory"
}3. 系统调用号的本质:数组下标
系统调用表结构
系统调用号确实是数组下标,指向系统调用表中的函数指针:
// 系统调用函数指针表
fn_ptr sys_call_table[] = {sys_setup, sys_exit, sys_fork, sys_read,sys_write, sys_open, sys_close, sys_waitpid,// ... 更多系统调用
};系统调用分发
当用户程序执行系统调用时,内核使用系统调用号作为索引:
// 通过系统调用号索引函数指针表
call [sys_call_table + eax * 4]这里:
eax包含系统调用号每个函数指针占4字节(32位系统)
通过
eax * 4计算偏移量,找到对应的系统调用处理函数
完整的系统调用流程
步骤1:用户层准备
// 用户程序调用write()
write(fd, buffer, count);// 标准库将其转换为系统调用
mov eax, 4 ; SYS_write = 4
mov ebx, fd ; 文件描述符
mov ecx, buffer ; 缓冲区地址
mov edx, count ; 字节数
int 0x80 ; 触发软中断内核处理流程
保存用户态上下文:CPU自动保存寄存器状态
切换到内核态:提升特权级别,使用内核栈
查找系统调用表:根据系统调用号找到处理函数
参数验证:检查用户提供的参数是否有效
执行系统调用:调用对应的内核函数
返回用户态:恢复保存的上下文,降低特权级别
步骤2:进入内核态
; 系统调用入口点(kernel/system_call.s)
_system_call:; 1. 验证系统调用号有效性cmp eax, nr_system_calls-1ja bad_sys_call; 2. 保存用户态寄存器push dspush espush fspush edxpush ecxpush ebx; 3. 设置内核数据段mov edx, 0x10mov ds, dxmov es, dx; 4. 调用对应的系统调用处理函数call [sys_call_table + eax * 4]; 5. 保存返回值push eax步骤3:执行系统调用处理函数
// write系统调用的实现(fs/read_write.c)
int sys_write(unsigned int fd, char *buf, int count) {// ... 实际的文件写入逻辑return bytes_written; // 返回写入的字节数
}步骤4:返回用户态
; 恢复上下文并返回
pop eax ; 获取系统调用返回值
pop ebx ; 恢复寄存器
pop ecx
pop edx
pop fs
pop es
pop ds
iret ; 返回到用户空间更多Linux0.11内核源码:
// sys.h
// 系统调⽤函数指针表。⽤于系统调⽤中断处理程序(int 0x80),作为跳转表。
extern int sys_setup (); // 系统启动初始化设置函数。 (kernel/blk_drv/hd.c,71)
extern int sys_exit (); // 程序退出。 (kernel/exit.c, 137)
extern int sys_fork (); // 创建进程。 (kernel/system_call.s, 208)
extern int sys_read (); // 读⽂件。 (fs/read_write.c, 55)
extern int sys_write (); // 写⽂件。 (fs/read_write.c, 83)
extern int sys_open (); // 打开⽂件。 (fs/open.c, 138)
extern int sys_close (); // 关闭⽂件。 (fs/open.c, 192)
extern int sys_waitpid (); // 等待进程终⽌。 (kernel/exit.c, 142)
extern int sys_creat (); // 创建⽂件。 (fs/open.c, 187)
extern int sys_link (); // 创建⼀个⽂件的硬连接。 (fs/namei.c, 721)
extern int sys_unlink (); // 删除⼀个⽂件名(或删除⽂件)。 (fs/namei.c, 663)
extern int sys_execve (); // 执⾏程序。 (kernel/system_call.s, 200)
extern int sys_chdir (); // 更改当前⽬录。 (fs/open.c, 75)
extern int sys_time (); // 取当前时间。 (kernel/sys.c, 102)
extern int sys_mknod (); // 建⽴块/字符特殊⽂件。 (fs/namei.c, 412)
extern int sys_chmod (); // 修改⽂件属性。 (fs/open.c, 105)
extern int sys_chown (); // 修改⽂件宿主和所属组。 (fs/open.c, 121)
extern int sys_break (); // (-kernel/sys.c, 21)
extern int sys_stat (); // 使⽤路径名取⽂件的状态信息。 (fs/stat.c, 36)
extern int sys_lseek (); // 重新定位读/写⽂件偏移。 (fs/read_write.c, 25)
extern int sys_getpid (); // 取进程id。 (kernel/sched.c, 348)
extern int sys_mount (); // 安装⽂件系统。 (fs/super.c, 200)
extern int sys_umount (); // 卸载⽂件系统。 (fs/super.c, 167)
extern int sys_setuid (); // 设置进程⽤⼾id。 (kernel/sys.c, 143)
extern int sys_getuid (); // 取进程⽤⼾id。 (kernel/sched.c, 358)
extern int sys_stime (); // 设置系统时间⽇期。 (-kernel/sys.c, 148)
extern int sys_ptrace (); // 程序调试。 (-kernel/sys.c, 26)
extern int sys_alarm (); // 设置报警。 (kernel/sched.c, 338)
extern int sys_fstat (); // 使⽤⽂件句柄取⽂件的状态信息。(fs/stat.c, 47)
extern int sys_pause (); // 暂停进程运⾏。 (kernel/sched.c, 144)
extern int sys_utime (); // 改变⽂件的访问和修改时间。 (fs/open.c, 24)
extern int sys_stty (); // 修改终端⾏设置。 (-kernel/sys.c, 31)
extern int sys_gtty (); // 取终端⾏设置信息。 (-kernel/sys.c, 36)
extern int sys_access (); // 检查⽤⼾对⼀个⽂件的访问权限。(fs/open.c, 47)
extern int sys_nice (); // 设置进程执⾏优先权。 (kernel/sched.c, 378)
extern int sys_ftime (); // 取⽇期和时间。 (-kernel/sys.c,16)
extern int sys_sync (); // 同步⾼速缓冲与设备中数据。 (fs/buffer.c, 44)
extern int sys_kill (); // 终⽌⼀个进程。 (kernel/exit.c, 60)
extern int sys_rename (); // 更改⽂件名。 (-kernel/sys.c, 41)
extern int sys_mkdir (); // 创建⽬录。 (fs/namei.c, 463)
extern int sys_rmdir (); // 删除⽬录。 (fs/namei.c, 587)
extern int sys_dup (); // 复制⽂件句柄。 (fs/fcntl.c, 42)
extern int sys_pipe (); // 创建管道。 (fs/pipe.c, 71)
extern int sys_times (); // 取运⾏时间。 (kernel/sys.c, 156)
extern int sys_prof (); // 程序执⾏时间区域。 (-kernel/sys.c, 46)
extern int sys_brk (); // 修改数据段⻓度。 (kernel/sys.c, 168)
extern int sys_setgid (); // 设置进程组id。 (kernel/sys.c, 72)
extern int sys_getgid (); // 取进程组id。 (kernel/sched.c, 368)
extern int sys_signal (); // 信号处理。 (kernel/signal.c, 48)
extern int sys_geteuid (); // 取进程有效⽤⼾id。 (kenrl/sched.c, 363)
extern int sys_getegid (); // 取进程有效组id。 (kenrl/sched.c, 373)
extern int sys_acct (); // 进程记帐。 (-kernel/sys.c, 77)
extern int sys_phys (); // (-kernel/sys.c, 82)
extern int sys_lock (); // (-kernel/sys.c, 87)
extern int sys_ioctl (); // 设备控制。 (fs/ioctl.c, 30)
extern int sys_fcntl (); // ⽂件句柄操作。 (fs/fcntl.c, 47)
extern int sys_mpx (); // (-kernel/sys.c, 92)
extern int sys_setpgid (); // 设置进程组id。 (kernel/sys.c, 181)
extern int sys_ulimit (); // (-kernel/sys.c, 97)
extern int sys_uname (); // 显⽰系统信息。 (kernel/sys.c, 216)
extern int sys_umask (); // 取默认⽂件创建属性码。 (kernel/sys.c, 230)
extern int sys_chroot (); // 改变根系统。 (fs/open.c, 90)
extern int sys_ustat (); // 取⽂件系统信息。 (fs/open.c, 19)
extern int sys_dup2 (); // 复制⽂件句柄。 (fs/fcntl.c, 36)
extern int sys_getppid (); // 取⽗进程id。 (kernel/sched.c, 353)
extern int sys_getpgrp (); // 取进程组id,等于getpgid(0)。(kernel/sys.c, 201)
extern int sys_setsid (); // 在新会话中运⾏程序。 (kernel/sys.c, 206)
extern int sys_sigaction (); // 改变信号处理过程。 (kernel/signal.c, 63)
extern int sys_sgetmask (); // 取信号屏蔽码。 (kernel/signal.c, 15)
extern int sys_ssetmask (); // 设置信号屏蔽码。 (kernel/signal.c, 20)
extern int sys_setreuid (); // 设置真实与/或有效⽤⼾id。 (kernel/sys.c,118)
extern int sys_setregid (); // 设置真实与/或有效组id。 (kernel/sys.c, 51)// 系统调⽤函数指针表。⽤于系统调⽤中断处理程序(int 0x80),作为跳转表。
fn_ptr sys_call_table[] = { sys_setup, sys_exit, sys_fork, sys_read,sys_write, sys_open, sys_close, sys_waitpid, sys_creat, sys_link,sys_unlink, sys_execve, sys_chdir, sys_time, sys_mknod, sys_chmod,sys_chown, sys_break, sys_stat, sys_lseek, sys_getpid, sys_mount,sys_umount, sys_setuid, sys_getuid, sys_stime, sys_ptrace, sys_alarm,sys_fstat, sys_pause, sys_utime, sys_stty, sys_gtty, sys_access,sys_nice, sys_ftime, sys_sync, sys_kill, sys_rename, sys_mkdir,sys_rmdir, sys_dup, sys_pipe, sys_times, sys_prof, sys_brk, sys_setgid,sys_getgid, sys_signal, sys_geteuid, sys_getegid, sys_acct, sys_phys,sys_lock, sys_ioctl, sys_fcntl, sys_mpx, sys_setpgid, sys_ulimit,sys_uname, sys_umask, sys_chroot, sys_ustat, sys_dup2, sys_getppid,sys_getpgrp, sys_setsid, sys_sigaction, sys_sgetmask, sys_ssetmask,sys_setreuid, sys_setregid
};// 调度程序的初始化⼦程序。
void sched_init(void)
{...// 设置系统调⽤中断⻔。set_system_gate(0x80, &system_call);
}_system_call:cmp eax,nr_system_calls-1 ;// 调⽤号如果超出范围的话就在eax 中置-1 并退出。ja bad_sys_callpush ds ;// 保存原段寄存器值。push espush fspush edx ;// ebx,ecx,edx 中放着系统调⽤相应的C 语⾔函数的调⽤参数。push ecx ;// push %ebx,%ecx,%edx as parameterspush ebx ;// to the system callmov edx,10h ;// set up ds,es to kernel spacemov ds,dx ;// ds,es 指向内核数据段(全局描述符表中数据段描述符)。mov es,dxmov edx,17h ;// fs points to local data spacemov fs,dx ;// fs 指向局部数据段(局部描述符表中数据段描述符)。
;// 下⾯这句操作数的含义是:调⽤地址 = _sys_call_table + %eax * 4。参⻅列表后的说明。
;// 对应的C 程序中的sys_call_table 在include/linux/sys.h 中,其中定义了⼀个包括72个
;// 系统调⽤C 处理函数的地址数组表。call [_sys_call_table+eax*4]push eax ;// 把系统调⽤号⼊栈。mov eax,_current ;// 取当前任务(进程)数据结构地址??eax。
;// 下⾯97-100 ⾏查看当前任务的运⾏状态。如果不在就绪状态(state 不等于0)就去执⾏调度程序。
;// 如果该任务在就绪状态但counter[??]值等于0,则也去执⾏调度程序。cmp dword ptr [state+eax],0 ;// statejne reschedulecmp dword ptr [counter+eax],0 ;// counterje reschedule
;// 以下这段代码执⾏从系统调⽤C 函数返回后,对信号量进⾏识别处理。
ret_from_sys_call:可是为什么我们用的系统调用,从来没有见过什么 int 0x80 或者 syscall 呢?都是直接调用上层的函数的啊?
那是因为Linux的gnu C标准库(glibc),给我们把几乎所有的系统调用全部封装了。glibc作为用户空间和内核之间的桥梁,它:
- 提供了POSIX标准接口
- 处理了不同架构的系统调用差异
- 添加了错误处理和缓冲区管理等额外功能
- 维护了向后兼容性
系统调用封装机制深度解析:从 int 0x80 到透明 API 的演进
一、用户不可见底层指令的核心原因:Glibc 的标准化封装
用户编程时无需直接调用 int 0x80 或 syscall 指令,是因为 GNU C 标准库(glibc) 对系统调用进行了全栈抽象,其设计目标包括:
跨平台兼容性
不同 CPU 架构使用不同的陷入指令:- x86 传统:
int 0x80(32 位) - x86 现代:
sysenter/sysexit(32 位高效指令) - x86_64:
syscall(64 位专用指令) - ARM:
svc(Supervisor Call)
glibc 通过宏定义屏蔽差异,用户只需调用open()、read()等标准函数
- x86 传统:
安全边界强化
直接执行汇编指令可能导致:- 寄存器设置错误引发内核崩溃
- 未经验证参数导致安全漏洞
glibc 在封装层添加以下安全检查:// 伪代码:glibc 对 write() 的封装 ssize_t write(int fd, const void *buf, size_t count) {if (buf == NULL) return -EFAULT; // 指针有效性校验if (count > MAX_IO_SIZE) return -EINVAL; // 参数范围校验return syscall(SYS_write, fd, buf, count); // 安全转入内核 }
3. 错误处理标准化
内核返回 -ERRNO,glibc 自动设置 errno 并返回 -1,简化用户逻辑:
封装示例:open()系统调用
// 应用程序员看到的接口
int fd = open("file.txt", O_RDONLY);// glibc内部的实现大致如下:
int open(const char *pathname, int flags, mode_t mode) {#ifdef __i386__return syscall(SYS_open, pathname, flags, mode);#elif __x86_64__return syscall(SYS_open, pathname, flags, mode);#elif __arm__return syscall(SYS_open, pathname, flags, mode);// ... 其他架构#endif
}二、系统调用号传递机制:宏的魔法
#define SYS_ify(syscall_name) __NR_##syscall_name 是 glibc 的核心转换引擎:
将用户友好的系统调用名称转换为内核识别的系统调用号
编译时转换:
SYS_ify(open)→ 预处理器展开为__NR_open→ 替换为数字(如 5)内核与用户空间协作:
角色 职责 实现方式 内核 定义系统调用号 /include/uapi/asm/unistd.h中定义__NR_open=5glibc 映射名称到编号 包含内核头文件,使用 SYS_ify宏转换用户程序 调用 open()无需感知数字编号
内核提供的系统调用号
系统调用号确实是由内核定义的,通常在内核头文件中:
// 内核头文件中的系统调用号定义(如asm/unistd_32.h)
#define __NR_restart_syscall 0
#define __NR_exit 1
#define __NR_fork 2
#define __NR_read 3
#define __NR_write 4
#define __NR_open 5
// ...glibc的封装宏
// glibc中的封装宏
#define SYS_ify(syscall_name) __NR_##syscall_name// 使用示例
int syscall_num = SYS_ify(open); // 展开为 __NR_openglibc的系统调用封装实现
不同架构的实现
glibc为每种架构提供了专门的系统调用封装:
// i386架构的实现(使用int 0x80)
#define INTERNAL_SYSCALL(name, err, nr, args...) \internal_syscall##nr (__NR_##name, err, args)// x86_64架构的实现(使用syscall)
#define INTERNAL_SYSCALL(name, err, nr, args...) \internal_syscall##nr (__NR_##name, err, args)INTERNAL_SYSCALL_NCS 宏详解
前面提到的宏是glibc内部用于实现系统调用的关键机制:
#define INTERNAL_SYSCALL_NCS(name, err, nr, args...) \
({ \unsigned long int resultvar; \LOAD_ARGS_##nr (args) \ // 加载参数到寄存器LOAD_REGS_##nr \ // 设置寄存器asm volatile ( \"syscall\n\t" \ // 执行syscall指令: "=a" (resultvar) \ // 输出:结果放在resultvar: "0" (name) ASM_ARGS_##nr \ // 输入:系统调用号和参数: "memory", "cc", "r11", "cx" \ // 破坏的寄存器); \(long int) resultvar; \ // 返回结果
})参数加载宏示例
// 加载3个参数的宏
#define LOAD_ARGS_3(a1, a2, a3) \register unsigned long int _a1 __asm__ ("rdi") = (unsigned long int) (a1); \register unsigned long int _a2 __asm__ ("rsi") = (unsigned long int) (a2); \register unsigned long int _a3 __asm__ ("rdx") = (unsigned long int) (a3);#define ASM_ARGS_3 , "r" (_a1), "r" (_a2), "r" (_a3)三、指令选择策略:从 int 0x80 到 syscall 的进化
glibc 动态选择最优陷入指令,其决策逻辑如下:
| 指令 | 触发方式 | 性能开销 | 适用场景 | glibc 选择策略 |
|---|---|---|---|---|
int 0x80 | 软中断 | 高 (~200 cycles) | 老式 32 位 CPU | 兼容旧硬件 |
sysenter | 专用快速指令 | 中 (~50 cycles) | 32 位 Pentium II+ | 内核检测 CPU 支持后启用 |
syscall | 64 位原生指令 | 低 (~20 cycles) | 所有 x86_64 系统 | 64 位程序默认 |
从int 0x80到syscall
// 传统int 0x80方式(i386)
#define INTERNAL_SYSCALL_INT80(name, err, nr, args...) \
({ \unsigned long int resultvar; \asm volatile ( \"int $0x80\n\t" \: "=a" (resultvar) \: "a" (__NR_##name) ASM_ARGS_##nr \: "memory", "cc" \); \(long int) resultvar; \
})// 现代syscall方式(x86_64)
#define INTERNAL_SYSCALL_SYSCALL(name, err, nr, args...) \
({ \unsigned long int resultvar; \asm volatile ( \"syscall\n\t" \: "=a" (resultvar) \: "0" (__NR_##name) ASM_ARGS_##nr \: "memory", "cc", "r11", "cx" \); \(long int) resultvar; \
})现代 glibc 的实现流程:
void* vsyscall_page = map_vsyscall(); // 映射内核提供的陷入指令页if (cpu_supports_syscall()) {vsyscall_page->entry = syscall_instruction; // 64位优先使用 syscall
} else if (cpu_supports_sysenter()) {vsyscall_page->entry = sysenter_instruction; // 32位新机器用 sysenter
} else {vsyscall_page->entry = int80_instruction; // 旧机器回退到 int 0x80
}
两种方式的对比
| 特性 | 直接系统调用 | 库函数 |
|---|---|---|
| 可移植性 | 低(依赖具体架构) | 高(跨架构统一接口) |
| 易用性 | 低(需要处理底层细节) | 高(简单函数调用) |
| 错误处理 | 需要手动处理 | 自动设置errno |
| 性能 | 稍好(少一层调用) | 稍差(多一层调用) |
| 类型安全 | 无 | 有参数类型检查 |
💎 终极本质:glibc 是用户态与内核间的 “协议转换器” ,通过标准化封装:
- 将底层硬件差异转化为统一 API
- 将危险的裸系统调用转化为安全调用
- 使应用程序员聚焦业务逻辑而非硬件细节
正如 Linux 内核开发者所述:“glibc 不是简单的包装,而是操作系统用户体验的最终定义者”
3.5 缺页中断?内存碎片处理?除零野指针错误?
缺页中断、内存碎片处理、除零错误、野指针访问等系统级问题,在硬件层面都会被转换为CPU内部的软中断信号。这些中断信号会触发预先注册的中断处理例程(Interrupt Service Routine),由操作系统内核完成相应的处理逻辑。
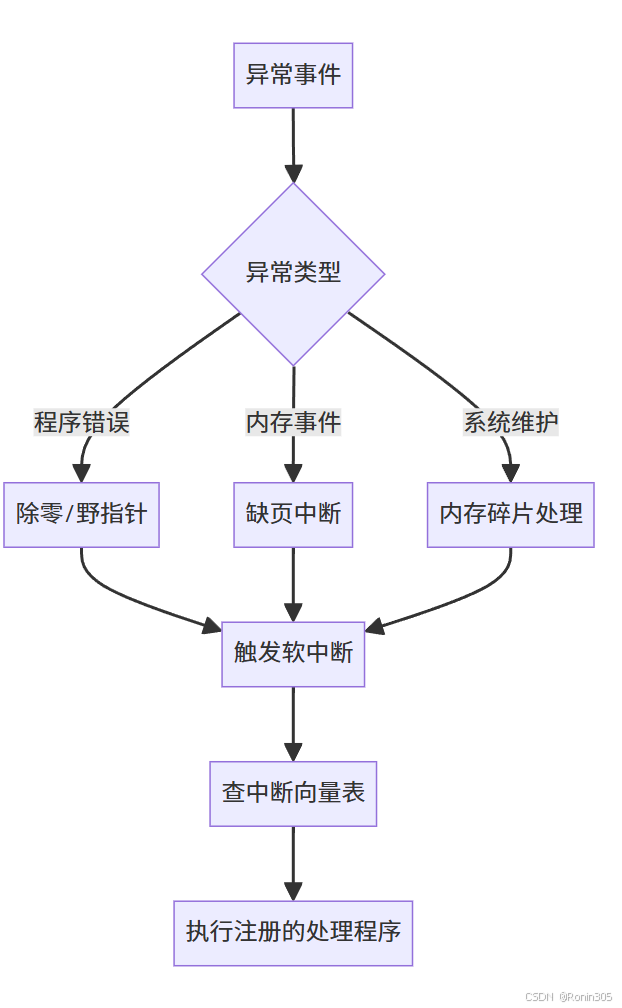
- 设计哲学:所有异常统一走中断处理路径,实现事件驱动架构(操作系统本质是"躺在中断处理例程上的代码块")
三种类型的CPU内部事件
| 类型 | 触发原因 | 示例 | 处理方式 |
|---|---|---|---|
| 陷阱 (Trap) | 程序主动请求 | 系统调用(int 0x80) | 执行请求的服务 |
| 故障 (Fault) | 可修复错误 | 缺页异常 | 修复后重新执行指令 |
| 中止 (Abort) | 严重错误 | 硬件错误、双重故障 | 终止进程 |
三类核心异常的处理机制
1. 缺页中断(Page Fault)
中断号:x86为14(
#PF)触发条件:
- 访问未映射的虚拟地址
- 权限不足(用户态访问内核页)
- 写只读页(Copy-on-Write场景)
处理流程:
// Linux 0.11处理逻辑 void do_page_fault(struct pt_regs *regs) {unsigned long address = read_cr2(); // 读取触发地址if (handle_vmalloc_fault(address)) // 处理vmalloc区域return;if (handle_copy_on_write(address)) // 写时复制处理return;__do_page_fault(address); // 核心页表处理 }关键操作:
- 分配物理页帧
- 建立页表映射
- 重新执行触发指令
📌 延迟分配优势:节省90%内存初始化开销(仅虚拟地址分配,物理内存按需分配)
2. 内存碎片处理
非直接中断:由kswapd内核线程周期性执行
触发条件:
- 缺页中断时发现连续物理页不足
- 内存水位低于阈值(lowmem_reserve)
核心算法:
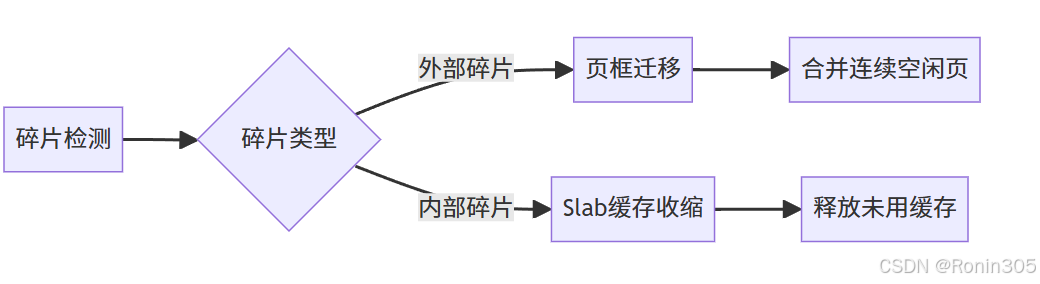
优化策略:
- 反碎片(Anti-Fragmentation)分组:
MOVABLE/RECLAIMABLE页类型隔离 - Compaction机制:迁移页框实现连续物理空间
- 反碎片(Anti-Fragmentation)分组:
3. 除零/野指针错误
中断号:
- 除零错误:0(
#DE) - 野指针:13(
#GP通用保护错误)
- 除零错误:0(
处理流程:
// Linux 0.11异常处理链 void divide_error(void) {send_signal(current, SIGFPE); // 发送浮点异常信号 }void general_protection(void) {if (is_user_ptr_fault()) // 检查是否用户态野指针send_signal(current, SIGSEGV); // 发送段错误信号elsekernel_panic(); // 内核态错误直接崩溃 }信号传递机制:
错误类型 信号值 默认行为 可捕获性 除零错误 SIGFPE 终止+core dump 是 野指针 SIGSEGV 终止+core dump 是
中断向量表:异常处理的调度中枢
Linux 0.11通过trap_init()注册异常处理程序:
void trap_init(void)
{int i;set_trap_gate(0,÷_error);// 设置除操作出错的中断向量值。以下雷同。set_trap_gate(1,&debug);set_trap_gate(2,&nmi);set_system_gate(3,&int3); /* int3-5 can be called from all */set_system_gate(4,&overflow);set_system_gate(5,&bounds);set_trap_gate(6,&invalid_op);set_trap_gate(7,&device_not_available);set_trap_gate(8,&double_fault);set_trap_gate(9,&coprocessor_segment_overrun);set_trap_gate(10,&invalid_TSS);set_trap_gate(11,&segment_not_present);set_trap_gate(12,&stack_segment);set_trap_gate(13,&general_protection);set_trap_gate(14,&page_fault);set_trap_gate(15,&reserved);set_trap_gate(16,&coprocessor_error);// 下⾯将int17-48 的陷阱⻔先均设置为reserved,以后每个硬件初始化时会重新设置⾃⼰的陷阱⻔。for (i=17;i<48;i++)set_trap_gate(i,&reserved);set_trap_gate(45,&irq13);// 设置协处理器的陷阱⻔。outb_p(inb_p(0x21)&0xfb,0x21);// 允许主8259A 芯⽚的IRQ2 中断请求。outb(inb_p(0xA1)&0xdf,0xA1);// 允许从8259A 芯⽚的IRQ13 中断请求。set_trap_gate(39,¶llel_interrupt);// 设置并⾏⼝的陷阱⻔。
}中断门 vs 系统门:
| 类型 | 特权级切换 | 典型应用 | 注册函数 |
|---|---|---|---|
| 陷阱门(Trap) | 不自动关中断 | 除零/缺页等异常 | set_trap_gate() |
| 系统门(System) | 允许用户态触发 | 系统调用(int 0x80) | set_system_gate() |
⚠️ 关键区别:陷阱门处理期间不屏蔽中断,允许更高优先级中断抢占
异常分类学:陷阱与异常的本质区别
1. 陷阱(Trap)
- 本质:主动触发的可控中断
- 特点:
- 同步触发(指令执行时立即发生)
- 返回后继续执行下条指令
- 典型代表:系统调用(
int 0x80/syscall)
- 应用场景:
mov eax, 4 ; sys_write调用号 int 0x80 ; 主动触发陷阱 ; 返回后继续执行此处
2. 异常(Exception)
本质:非预期的错误事件
特点:
- 异步或同步触发
- 可能无法恢复执行(如野指针)
- 典型代表:缺页异常、除零错误
处理差异:
特性 陷阱(Trap) 异常(Exception) 触发意图 程序主动请求 程序非预期错误 返回位置 下条指令 可能无法返回 特权级 用户态→内核态 当前特权级处理 典型应用 系统调用 硬件错误处理
总结:
📌 操作系统架构的核心要点:
• 操作系统本质上是通过中断处理机制驱动的代码集合!内核的主要功能都是通过响应各种中断事件来实现的,包括:
- 硬件中断(时钟中断、设备IO中断)
- 软件中断(系统调用)
- 异常处理(CPU产生的错误条件)
• 在x86架构中,CPU内部的软中断分为两类:
- 陷阱(Trap):由程序主动触发的可控中断,如:
- int 0x80(传统系统调用)
- syscall/sysenter(现代快速系统调用)
- 异常(Exception):由CPU自动触发的错误条件,如:
- 除零错误(#DE,中断号0)
- 页错误(#PF,中断号14)
- 一般保护错误(#GP,中断号13)
(现在可以理解"缺页异常"的命名由来:它本质上是CPU在地址转换过程中检测到页表无效时自动触发的异常条件,属于被动触发的错误处理机制)
4. 如何理解内核态和用户态
一、核心定义:特权级与地址空间的绑定
特权级(Privilege Level)
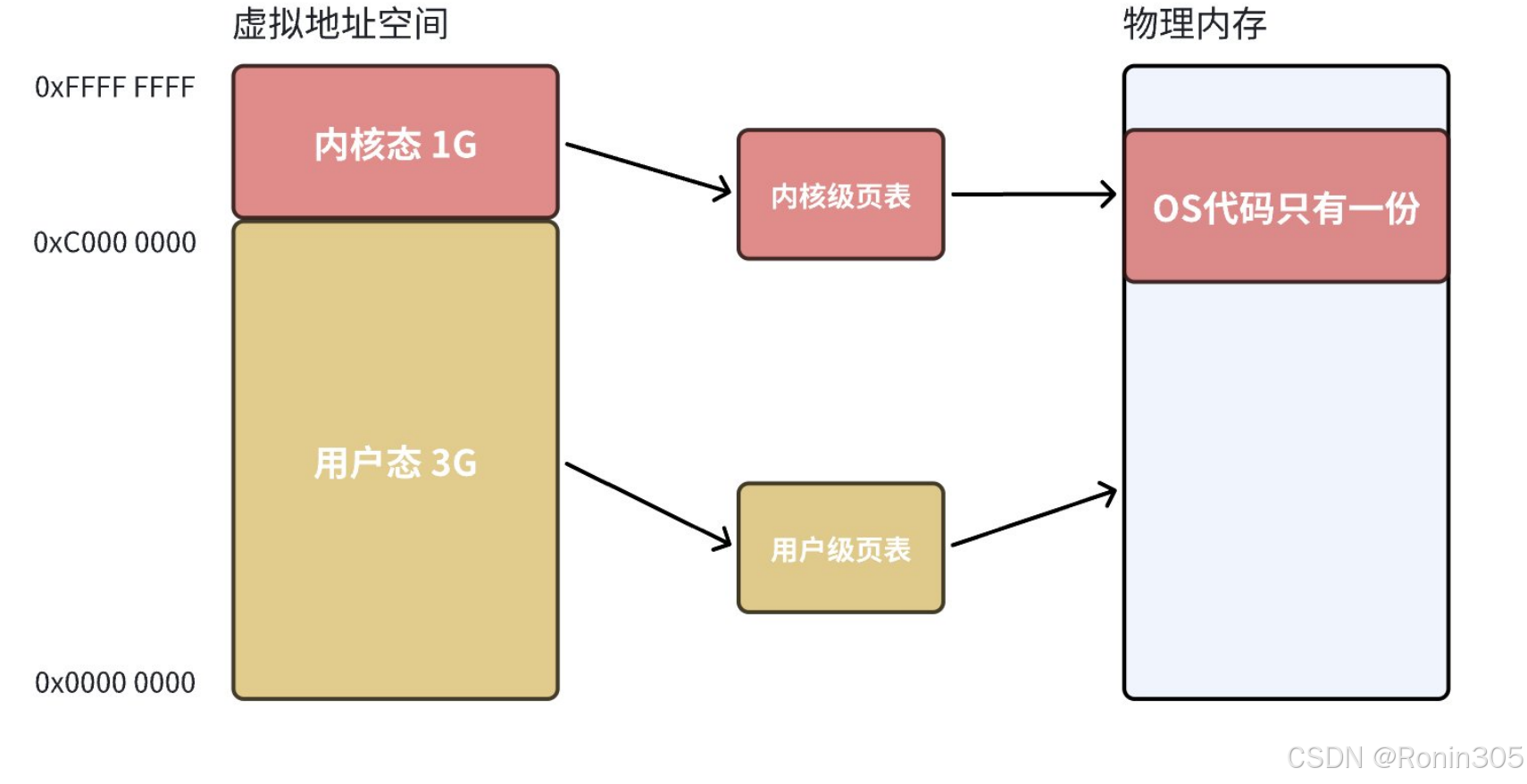
CPU 通过 当前特权级(CPL) 动态标记运行环境权限,x86 架构采用四级特权环(Ring 0-3):- 用户态(Ring 3) :CPL=3,仅能访问用户空间(0x00000000-0xBFFFFFFF)
- 内核态(Ring 0) :CPL=0,可访问全部内存(包括内核空间 0xC0000000-0xFFFFFFFF)
// CPU通过当前特权级别(CPL)控制访问权限 #define USER_CPL 3 // 用户态特权级 #define KERNEL_CPL 0 // 内核态特权级
地址空间映射
空间类型 虚拟地址范围 可访问性 存储内容 用户空间 0x00000000-0xBFFFFFFF 仅用户态程序 用户代码/数据/堆栈 内核空间 0xC0000000-0xFFFFFFFF 仅内核态程序 内核代码/全局数据/设备驱动 📌 关键特性:所有进程共享同一内核空间,但用户空间相互隔离。系统调用执行时,CPU 仍在当前进程的地址空间内操作,仅特权级提升至 Ring 0。
二、状态切换机制:软中断驱动的安全转换
1. 触发方式与硬件协作
用户态→内核态通过三类事件触发:
- 软中断指令:
int 0x80(传统)或syscall(现代)显式请求 - 硬件自动校验:CPU 比较 CPL(当前特权级)、DPL(目标段描述符特权级)、RPL(请求特权级),仅当 CPL ≤ DPL 时允许切换
2. 切换流程详解
- 上下文保存
CPU 自动将用户态寄存器(EFLAGS/CS/EIP)压入当前进程的内核栈。 - 特权级与栈切换
- 从任务状态段(TSS)加载内核栈指针(ESP0)
- CPL 从 3→0,CS 寄存器指向内核代码段
- 执行内核服务
通过中断向量号定位处理函数(如系统调用查sys_call_table) - 返回用户态
iret指令恢复保存的寄存器,CPL 从 0→3
⚙️ 性能代价:一次切换约消耗 100-200 CPU 周期,现代 CPU 通过
syscall指令优化至 20 周期。
三、安全性设计:三重防护机制
机制1:硬件级别的特权检查
当执行 int 0x80 或 syscall 时,CPU会进行严格的安全检查:
; 系统调用入口的硬件检查流程
system_call_entry:; 1. 检查目标代码段的DPL(描述符特权级)是否允许当前CPL调用; 如果CPL > DPL,触发通用保护异常(#GP); 2. 检查中断描述符表(IDT)的门描述符类型; 确保只能通过正确的门类型进入内核; 3. 自动切换栈指针到内核栈; 防止用户栈污染内核; 4. 保存用户态寄存器状态; 保证能够正确返回机制2:内存保护单元(MMU)的保护
MMU通过页表机制确保内存访问的安全性:
// 页表项中的保护位
#define _PAGE_PRESENT 0x001 // 页存在
#define _PAGE_RW 0x002 // 可写
#define _PAGE_USER 0x004 // 用户可访问
#define _PAGE_SUPERVISOR 0x000 // 只能内核访问// 内核页表设置:用户空间可访问,内核空间仅内核可访问
void setup_page_tables(void) {// 用户空间页表:设置_USER标志set_page_flags(user_vaddr, _PAGE_PRESENT | _PAGE_RW | _PAGE_USER);// 内核空间页表:不设置_USER标志set_page_flags(kernel_vaddr, _PAGE_PRESENT | _PAGE_RW);
}机制3:系统调用参数验证
内核不信任任何来自用户空间的参数:
// 系统调用参数安全检查
asmlinkage long sys_write(unsigned int fd, const char __user *buf, size_t count) {// 1. 检查文件描述符有效性if (fd >= NR_OPEN) return -EBADF;// 2. 检查用户指针有效性(重要!)if (!access_ok(VERIFY_READ, buf, count))return -EFAULT;// 3. 检查计数合理性if (count > MAX_WRITE_SIZE) return -EINVAL;// 只有通过所有检查才会真正执行操作return do_write(fd, buf, count);
}从用户态到内核态的安全切换
用户程序调用系统调用 → 执行int 0x80/syscall↓
CPU自动进行特权级检查(CPL vs DPL)↓
如果检查失败 → 触发#GP异常 → 杀死进程↓
如果检查通过 → 切换栈指针到内核栈↓
保存用户态寄存器状态↓
根据系统调用号查找系统调用表↓
执行对应的内核函数(进行参数验证)↓
完成操作后返回用户态关键的安全屏障
门描述符检查:确保只能通过预设的安全入口进入内核
栈切换:防止用户栈数据污染内核
参数验证:所有用户提供的参数都必须经过严格验证
返回地址验证:确保返回到合法的用户空间地址
四、地址空间统一性:操作系统“永不消失”的奥秘
内核空间全局共享
所有进程的页表中,3GB-4GB 区域映射同一物理内存(内核代码区)。
→ 进程切换时 CR3 寄存器(页表基址)更新,但内核映射不变。系统调用执行位置
当进程通过write()等调用进入内核时:- CPU 仍在该进程的上下文中执行内核函数
- 通过
current宏(x86 通过 FS 寄存器)获取当前进程的task_struct
🌰 示例:进程 A 调用
read()时,内核通过current->files获取 A 的文件描述符表,不会访问进程 B 的数据。
五、软中断安全性:CPL 自动变更的保障
执行 int 0x80 后 CPL 自动变 0 是否危险?
答案是否定的,原因如下:
1. 入口可控性
- 中断门目标地址固定:由 OS 启动时写入 IDT,用户无法修改
- 非任意跳转:仅能跳转到内核预定义的入口(如
entry_SYSCALL_64)
2. 执行范围约束
- 栈隔离:使用内核栈而非用户栈,避免用户操控内核执行流
- 代码段限制:CS 寄存器指向内核代码段(DPL=0),用户无法注入代码
3. 返回时的安全恢复
iret 指令从内核栈恢复用户态寄存器,自动降权至 CPL=3。
总结:设计哲学与工程意义
空间复用与隔离的平衡
通过共享内核空间减少内存冗余,通过用户空间隔离保障进程安全。特权切换的本质
软中断不是“漏洞”,而是硬件辅助的安全通道,其权限变更受严格校验。操作系统的“不变性”根源
内核代码位于所有进程共享的 3-4GB 区域,进程切换仅改变用户空间映射,故操作系统始终可被访问。
💎 终极启示:用户态与内核态的划分是计算机科学中 “最小权限原则” 的典范——用户程序仅在必要时获取有限内核权限,且所有操作受硬件与操作系统的双重监护。这种设计使系统在提供高性能服务的同时,将安全风险控制在最低水平。
最后通过一张图来总结:
5. 可重入函数
5.1 详细场景描述
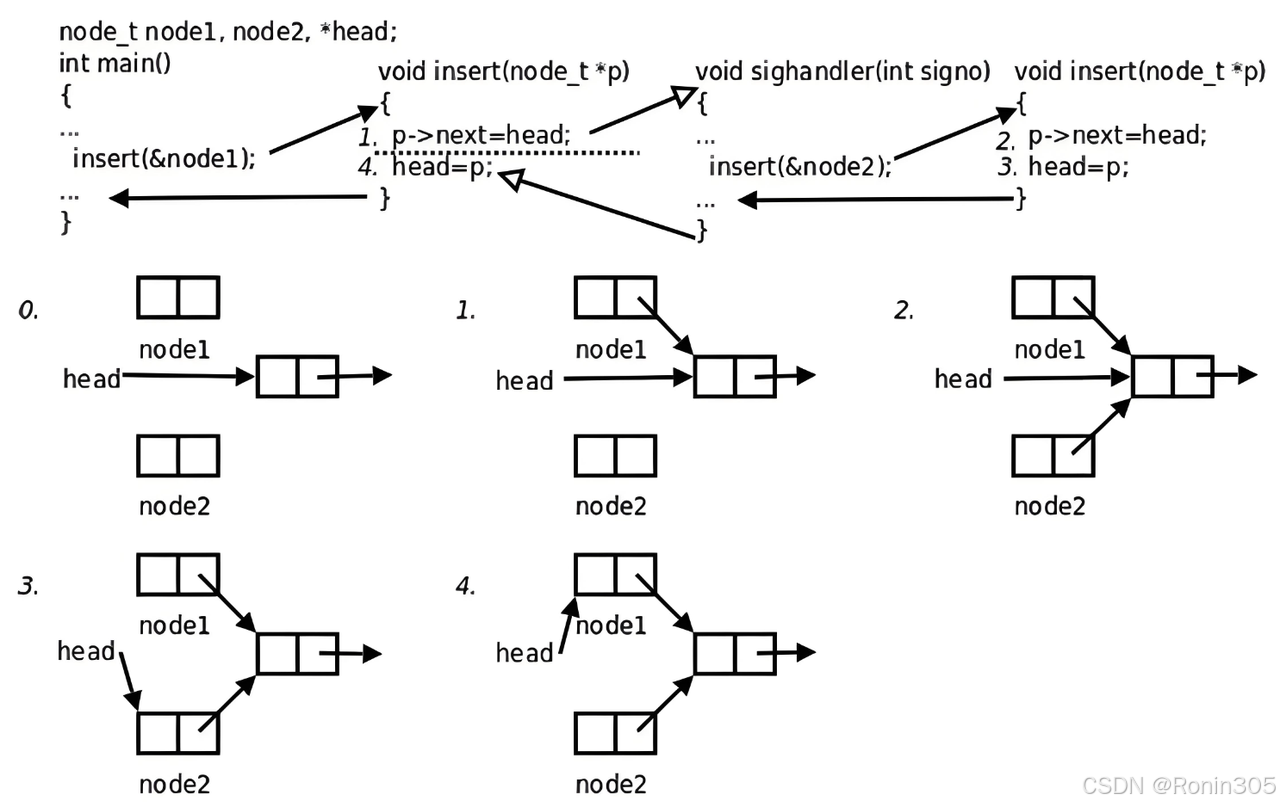
初始操作:
main函数调用insert函数,向链表头节点head插入新节点node1- 插入操作分为两个关键步骤: a. 将
node1的next指针指向head的当前下一个节点 b. 将head的next指针更新为指向node1
中断发生:
- 当
insert函数刚完成步骤a(指针调整)但尚未执行步骤b(指针更新)时 - 硬件中断触发,进程切换到内核态
- 当
信号处理:
- 内核发现有待处理的信号,于是切换到用户态执行信号处理函数
sighandler sighandler同样调用insert函数,向同一个链表头节点head插入节点node2- 这次
insert函数完整执行了两个步骤,没有被打断
- 内核发现有待处理的信号,于是切换到用户态执行信号处理函数
返回主流程:
- 信号处理完成后,控制权返回内核态,再回到用户态
- 继续从
main函数中被打断的insert函数处执行,完成之前未执行的步骤b
最终结果:
- 由于步骤b的重复执行,导致
node1最终覆盖了node2的插入 - 虽然两个插入操作都执行了,但链表中实际上只保留了
node1,造成数据丢失
- 由于步骤b的重复执行,导致
5.2 关键冲突点分析
共享资源竞争
- 全局链表头
head是共享状态 - 两个独立控制流(main和sighandler)同时修改同一资源
- 全局链表头
操作原子性破坏
插入操作被拆分为非原子步骤:void insert(Node* node) {node->next = head; // 步骤1head = node; // 步骤2 }当步骤1和步骤2之间被中断时,链表处于不一致状态(
head尚未更新)。信号处理特殊性
信号处理函数与主程序共享用户态上下文(包括全局变量),但拥有独立栈帧。
💥 结果:node2的插入被node1的步骤2覆盖,造成数据丢失(仅node1存在于链表中)。
5.3 为什么访问局部变量不会造成错乱?
关键原因:栈的独立性
每个执行流(函数调用)都有自己独立的栈帧,局部变量存储在栈中,因此不同调用之间的局部变量是隔离的。
// 可重入的函数示例
int add(int a, int b) {int result; // 局部变量,在栈上分配result = a + b; // 只操作局部变量和参数return result;
}栈内存布局
进程地址空间:
┌────────────────┐
│ 栈区 │ ← 每个函数调用有自己的栈帧
│ (Stack) │ 局部变量在这里分配
├────────────────┤
│ 堆区 │
│ (Heap) │ ← 全局变量和malloc内存在这里
├────────────────┤
│ 数据区 │ ← 全局变量在这里
│ (Data) │
├────────────────┤
│ 代码区 │
│ (Text) │
└────────────────┘安全机制:
- 栈帧隔离:每次函数调用创建独立栈帧
- 状态私有化:参数和局部变量存储在调用者专属栈中
- 无共享依赖:不访问全局内存或静态存储区
| 存储区域 | 用户态访问 | 内核态访问 | 重入安全性 |
|---|---|---|---|
| 栈空间 | 私有 | 私有 | ✅ 安全 |
| 全局变量区 | 共享 | 共享 | ❌ 危险 |
| 堆空间 | 共享 | 共享 | ❌ 危险 |
| 静态存储区 | 共享 | 共享 | ❌ 危险 |
线程安全 vs 可重入性
| 特性 | 可重入函数 | 线程安全函数 | 关系 |
|---|---|---|---|
| 核心目标 | 单线程内中断安全 | 多线程并发安全 | 正交但常重叠 |
| 实现方式 | 避免所有共享状态 | 可通过锁保护共享状态 | 可重入⇒线程安全 |
| 中断场景 | 必须支持 | 不要求 | 可重入要求更严格 |
| 信号处理 | 唯一安全选择 | 可能死锁 | 信号处理必须可重入 |
📌 关键结论:所有可重入函数都是线程安全的,但线程安全函数不一定可重入。
5.4 不可重入函数的典型模式与风险
1. 内存管理函数(malloc/free)
危险根源:
// malloc内部伪代码
void* malloc(size_t size) {static HeapSegment* free_list; // 全局空闲链表lock_mutex(); // 线程安全但不可重入!HeapSegment* block = find_free_block(free_list);unlock_mutex();return block;
}
- 全局状态:
free_list管理堆内存的全局数据结构 - 中断风险:若在
find_free_block执行中被信号中断,二次调用将破坏链表完整性 - 死锁风险:信号处理中调用malloc可能导致锁重入死锁
2. 标准I/O函数(printf/fgets)
危险案例:
void log_message(const char* msg) {static FILE* logfile; // 静态变量!if (!logfile) logfile = fopen("app.log", "a");fprintf(logfile, "%s\n", msg); // 使用全局I/O缓冲区
}
- 缓冲区共享:
FILE结构包含I/O缓冲区,多控制流写入导致数据混合 - 位置指针冲突:文件偏移量
fpos被并发修改
3. 不可重入函数特征总结
符合以下任一条件即不可重入:
- 使用全局变量(如
errno) - 操作静态局部变量
- 调用非原子性的共享资源操作
- 依赖不可重入库函数(如标准I/O)
- 返回静态存储区指针(如
ctime())
5.5 可重入函数设计实践
1. 基础设计模式
// 安全版本链表插入
void reentrant_insert(Node** head_ptr, Node* node) {node->next = *head_ptr; // 通过指针参数访问*head_ptr = node; // 修改调用者提供的指针
}
调用方式:
Node* private_list = NULL; // 每个控制流独立维护// main函数
reentrant_insert(&private_list, node1);// 信号处理函数
reentrant_insert(&sig_list, node2); // 使用独立链表
2. 高级技术:线程局部存储(TLS)
__thread Node* thread_local_head; // GCC扩展void thread_safe_insert(Node* node) {node->next = thread_local_head;thread_local_head = node;
}
__thread关键字:每个线程拥有独立变量实例- 信号处理适配:需配合
sigaltstack使用独立栈
3. 可重入标准库替代方案
| 传统函数 | 危险原因 | 可重入替代 | 头文件 |
|---|---|---|---|
strtok | 静态状态指针 | strtok_r | <string.h> |
ctime | 返回静态缓冲区 | asctime_r | <time.h> |
rand | 静态种子状态 | rand_r | <stdlib.h> |
gmtime | 静态结构体 | gmtime_r | <time.h> |
💡 命名规律:
_r后缀表示reentrant(可重入)
5.6 特殊场景:信号处理函数设计规范
1. 信号安全函数清单(POSIX标准)
仅允许调用以下异步信号安全函数:
// 典型信号安全函数
_Exit() abort() accept() access()
alarm() bind() cfgetispeed() cfgetospeed()
...
write() // 部分实现安全
禁止项:
malloc/free:可能破坏堆结构printf:共享I/O缓冲区- 任何非异步信号安全函数
2. 信号处理最佳实践
void signal_handler(int sig) {// 1. 仅设置原子标志volatile sig_atomic_t flag = 1;// 2. 通过管道通知主循环char byte = 1;write(self_pipe[1], &byte, 1); // write是信号安全的
}
主程序处理:
while (read(self_pipe[0], &byte, 1) > 0) {// 在安全环境执行实际逻辑process_signal_events();
}
总结:可重入函数的设计要义
状态隔离原则
- 只操作栈数据(参数/局部变量)
- 绝不触碰全局或静态存储区
资源访问规范
- 避免动态内存管理(malloc/free)
- 禁用标准I/O库(使用无缓冲I/O如
write) - 调用链确保全可重入
信号处理特别约束
- 仅使用POSIX规定的异步信号安全函数
- 通过标志位+事件循环解耦处理逻辑
架构级解决方案
- 为中断/信号分配专用内存池
- 采用Actor模型或消息队列隔离控制流
6. 信号机制深度总结与思考
6.1 为什么信号产生和执行最终都要由OS来进行?
根本原因:操作系统是进程的管理者和资源的协调者
权限控制:只有操作系统内核拥有最高权限,能够修改任何进程的内核数据结构(如
task_struct)。安全性:如果允许用户进程直接向其他进程发送信号或修改其状态,会导致系统安全性崩溃。
资源管理:OS负责管理系统中的所有资源,信号作为一种进程间通信机制,必须由OS统一管理以确保公平性和正确性。
抽象接口:OS为进程提供了统一的信号处理接口(如
signal(),sigaction()),隐藏了底层实现的复杂性。
类比:就像一个国家中,只有中央政府(OS)有权向地方政府(进程)下达正式指令(信号),地方政府之间不能随意互相指挥。
6.2 信号的处理是否是立即处理的?
不是立即处理,而是在"合适的时候"处理
异步性:信号可能在任何时间点到达,进程无法预测其确切到达时间。
处理时机:信号的处理发生在进程从内核态返回用户态之前。具体时机包括:
系统调用完成时
中断处理完成时
进程时间片用完,发生调度时
为什么不能立即处理?
进程可能正在执行关键代码段,不能被中断
可能正在处理更重要的任务
信号处理函数需要在自己的上下文中执行
6.3 信号是否需要被暂时记录?记录在哪里最合适?
是的,信号需要被暂时记录
记录位置:进程的内核数据结构中最合适
具体来说,信号被记录在进程的 task_struct 结构中的两个关键位图中:
未决信号集(pending):记录哪些信号已经产生但尚未处理
阻塞信号集(blocked/mask):记录哪些信号被暂时屏蔽(不处理)
为什么记录在内核数据结构中最合适?
内核数据结构对所有进程是隔离的,保证安全性
内核可以高效地管理和访问这些信息
符合UNIX"一切皆文件/资源"的设计哲学
6.4 进程在没有收到信号时,能否知道应对合法信号作何处理?
是的,进程提前知道如何处理信号
信号处理表:每个进程在创建时就从父进程继承了一张信号处理方式表,存储在
task_struct的sighand字段中。三种处理方式:
默认操作(SIG_DFL)
忽略信号(SIG_IGN)
自定义处理函数
提前注册:进程可以通过
signal()或sigaction()系统调用提前注册信号处理方式。
类比:就像你提前告诉秘书:"如果有A类邮件,直接归档;如果有B类邮件,立即通知我;如果有C类邮件,转交给某部门处理"。
6.5 如何理解OS向进程发送信号?完整的发送处理过程
完整发送处理过程可以分为以下步骤:
阶段一:信号产生
信号由某种事件产生(硬件异常、软件条件、其他进程调用kill等)
OS确定目标进程
阶段二:信号记录(内核完成)
OS检查目标进程的阻塞信号集
如果信号未被阻塞,OS在目标进程的未决信号集中设置对应位
如果信号被设置为立即传递(实时信号)或进程正在可中断的睡眠中,OS会唤醒进程
阶段三:信号检测(内核完成)
当目标进程从内核态返回用户态前,OS会检查其未决信号集
OS查找信号处理方式表,确定如何处理每个未决信号
阶段四:信号处理
对于需要默认处理的信号,OS直接执行默认操作(终止、停止等)
对于需要忽略的信号,OS清除未决位,不做其他处理
对于有自定义处理函数的信号:
OS在用户栈上精心构造一个"信号处理帧"
修改进程的用户态指令指针,使其指向信号处理函数
进程返回用户态后,首先执行信号处理函数
阶段五:处理完成
信号处理函数执行完毕后,调用
sigreturn()系统调用OS恢复进程原来的执行上下文,清除信号处理帧
进程继续从被信号中断的地方执行
整个过程体现了OS的核心作用:
OS是信号的"邮局",负责接收、分类和投递
OS是信号的"交通警察",决定何时投递信号
OS是信号的"秘书",维护着每个进程的信号处理偏好表
OS是信号的"保镖",确保信号处理不会破坏系统稳定性
至此,我们对信号从产生,到保存,再处理,这三个阶段从内到外都有了一个深刻的认识