在Ansys Simplorer中设计三相逆变器,并与Maxwell FEA耦合,实现160kW PMSM
介绍
在这篇博文中,我们将探讨如何使用Ansys Simplorer设计三相逆变器,并将其与Ansys Maxwell中的电磁有限元分析模型耦合,以获得准确的系统级结果。
Ansys Electronics为多域仿真提供了强大的生态系统,可实现跨各种物理领域的无缝集成。Maxwell 用于电磁有限元分析 (FEA),Simplorer (Twin Builder) 用于系统级逆变器和控制器设计,Icepak 用于电子热仿真。
例如,我们将使用 Simplorer 介绍 160 kW、8 极永磁同步电机 (PMSM) 的逆变器设计过程。让我们开始吧!
1. 逆变器设计
实现三相逆变器有两种常见的拓扑:
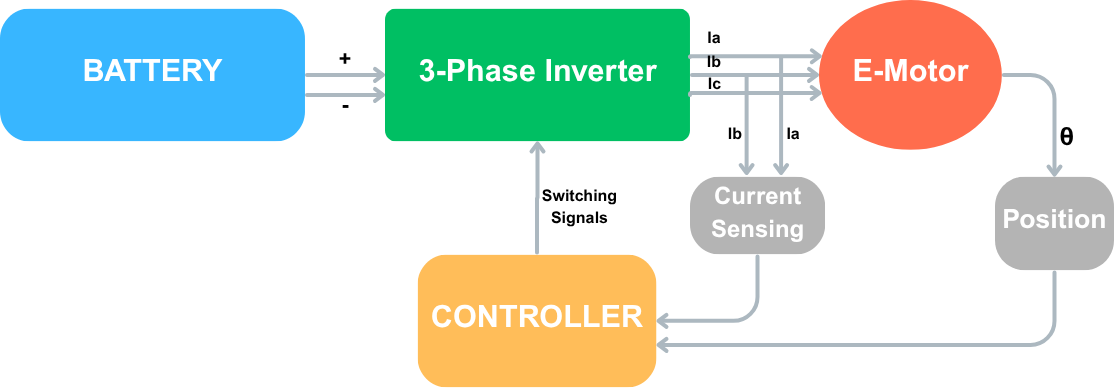
电池供电逆变器:电力通过逆变器从直流电池输送到电机(通常用于电动汽车)。
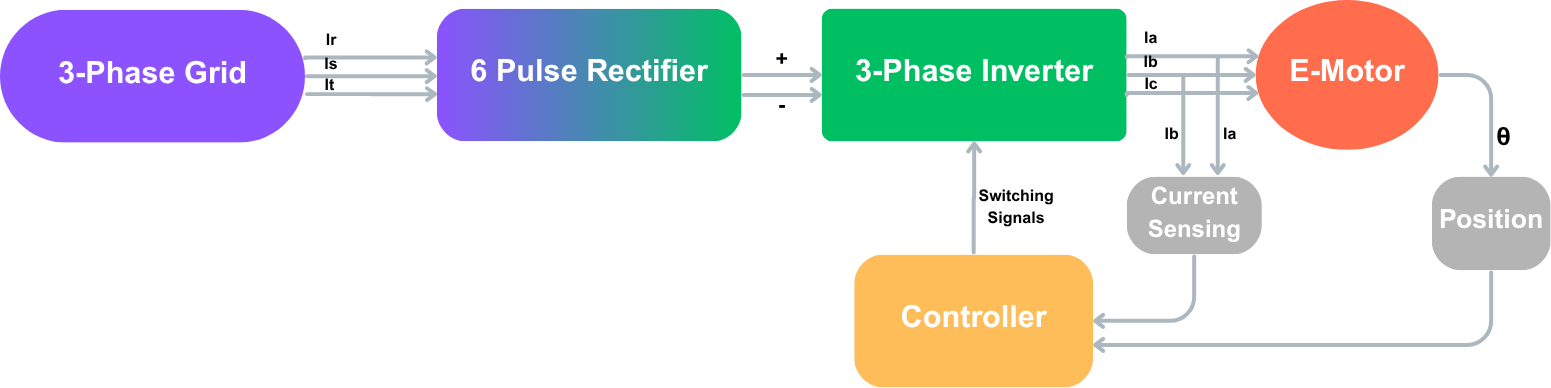
- 并网逆变器:电力从交流电网流经整流器,然后通过逆变器流向电机——这在工业系统中很常见。
在这篇文章中,我们将演示如何在Ansys Simplorer中构建这两种情况。
1.1 电池供电三相逆变器
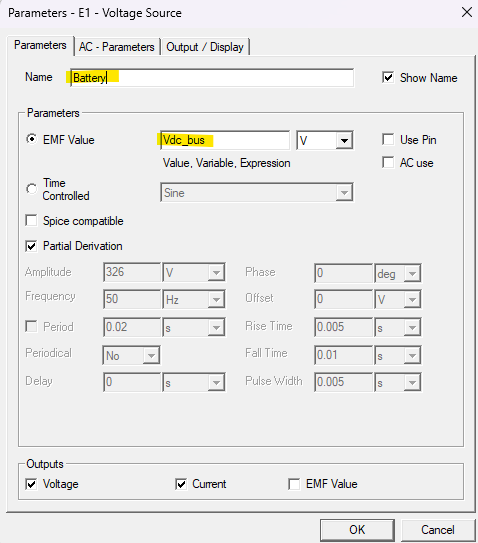
第 1 步:设置直流电源
在电子桌面中启动Ansys Simplorer。
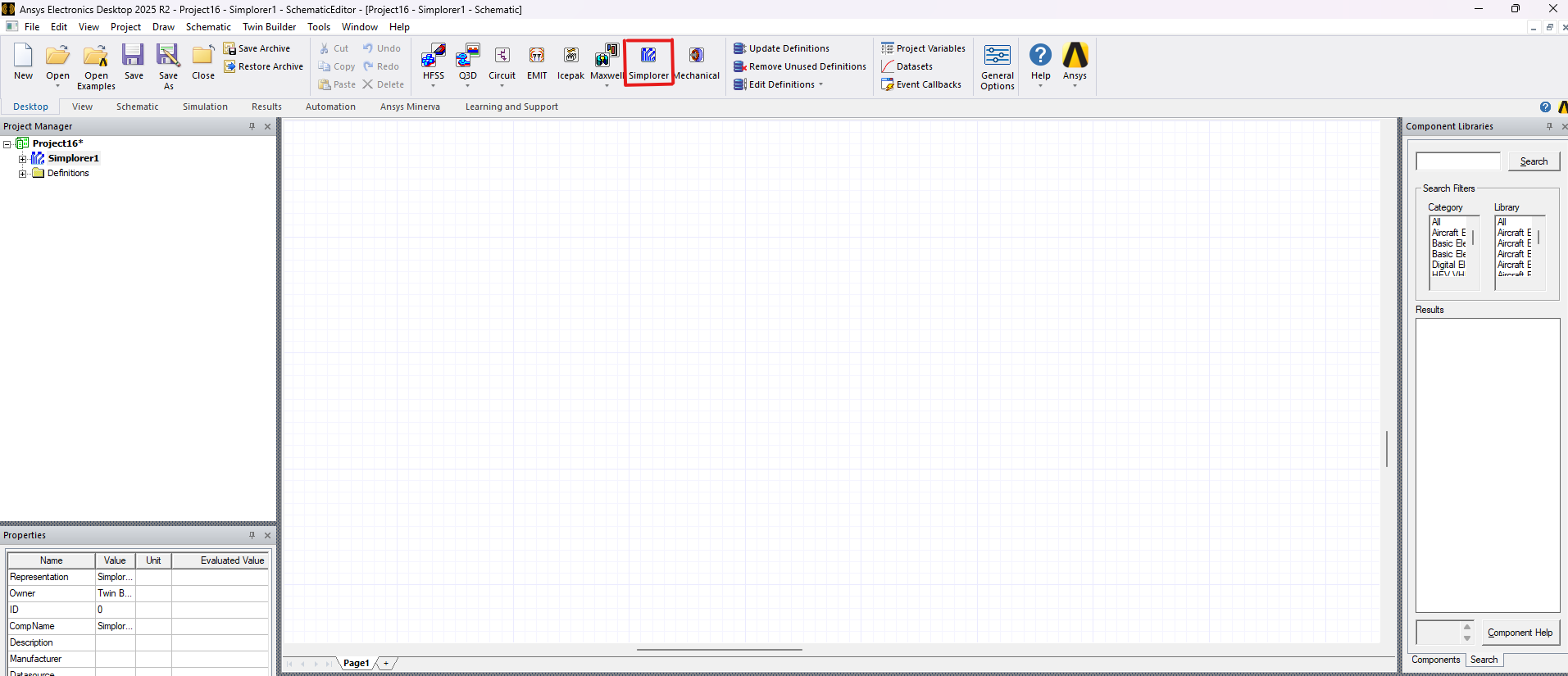
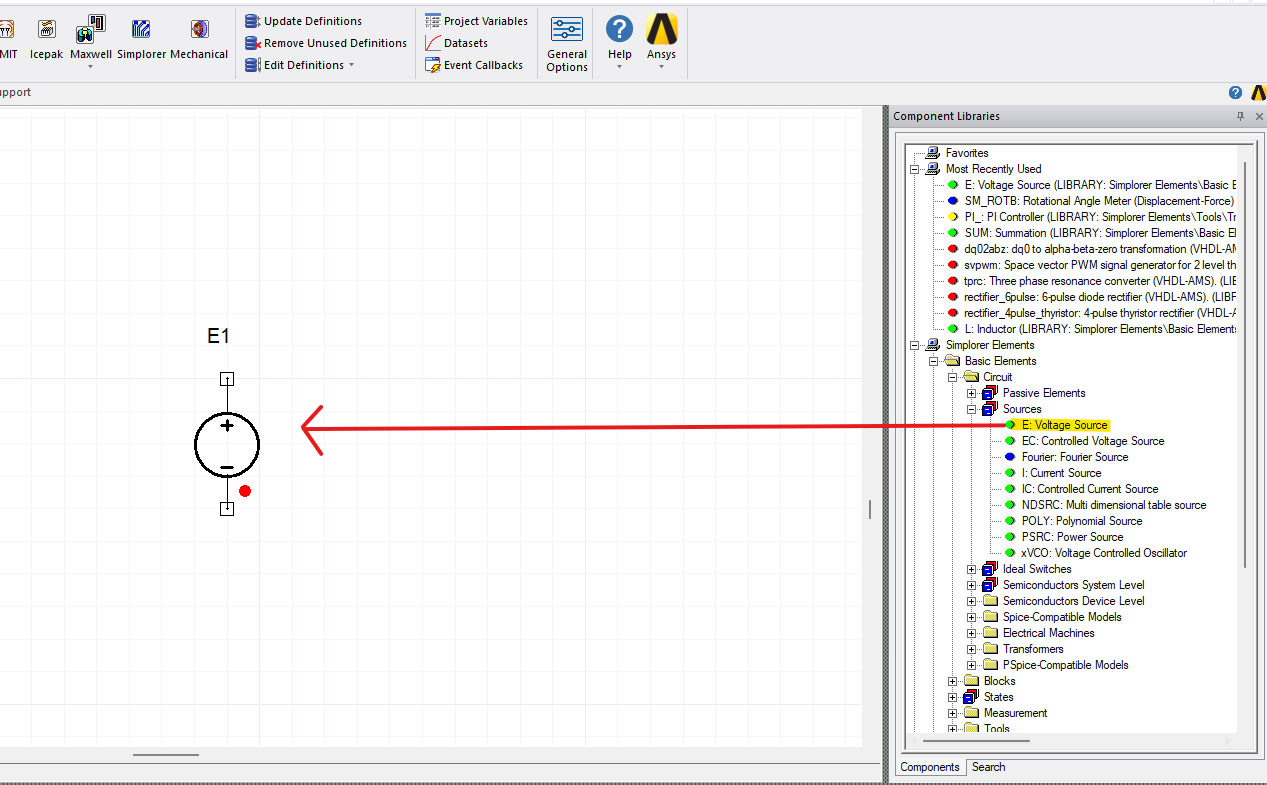
2. 从“元件库”(Component Libraries) 中,转至:
3. 将 Voltage Source 块拖到工作区中。双击它,将其重命名为“电池”,然后设置直流链路电压tage(例如,450 V)。
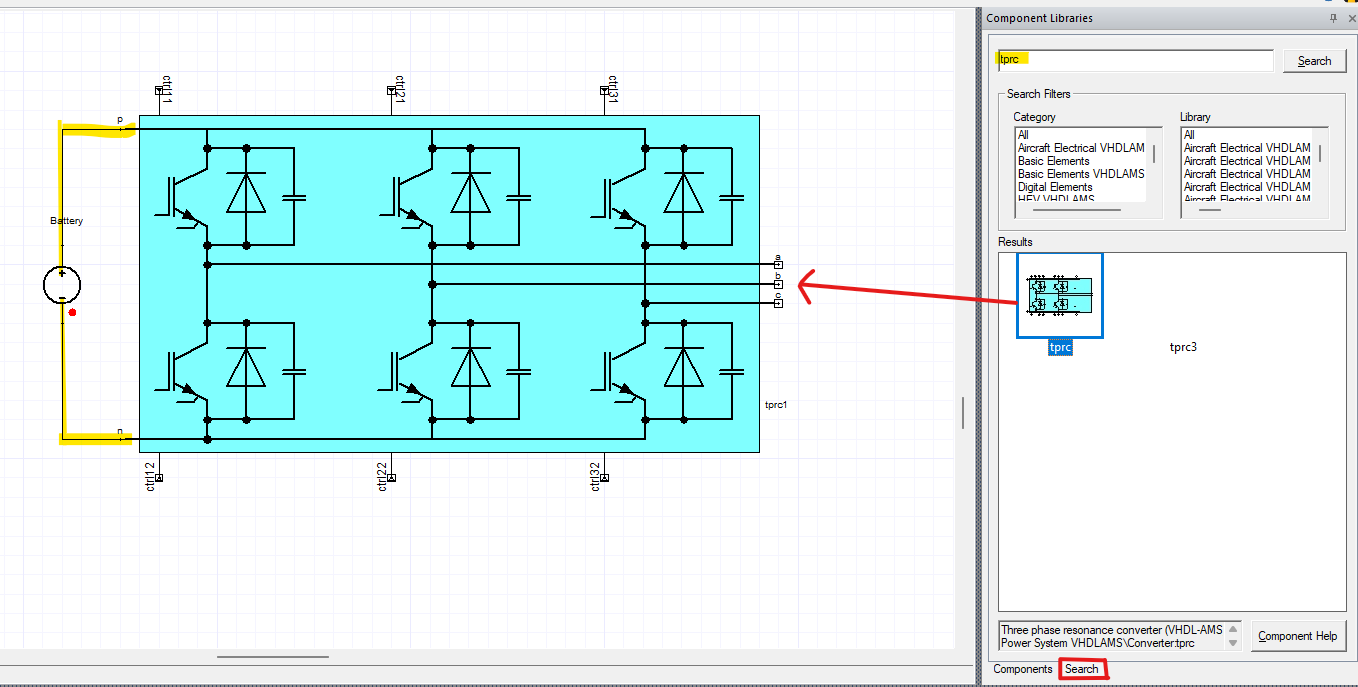
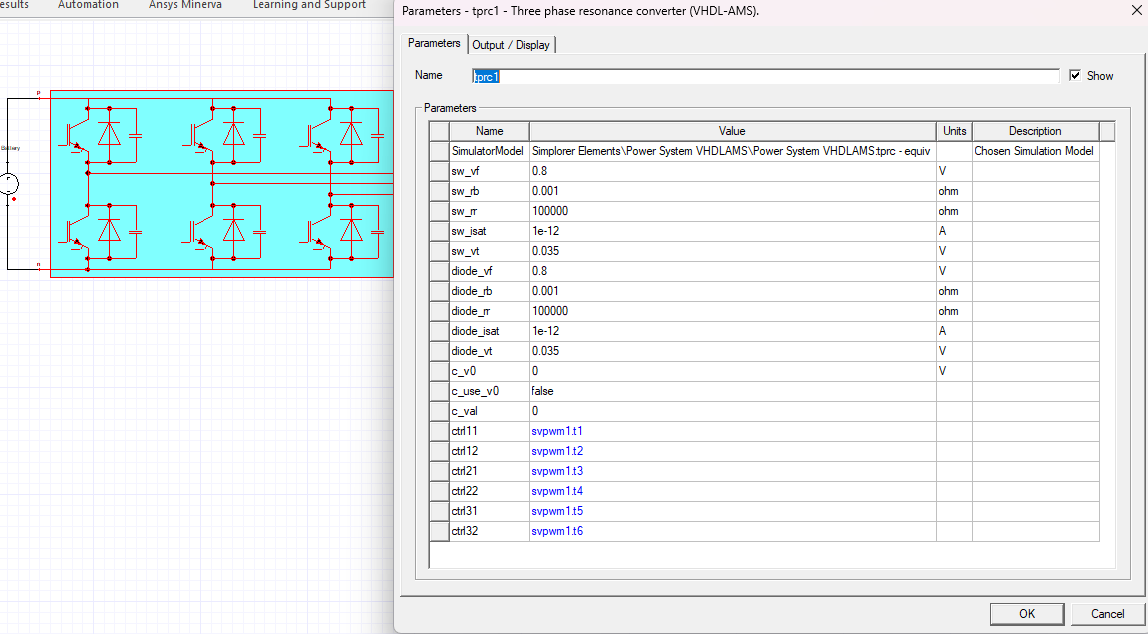
第 2 步:添加三相逆变器模块
搜索 TPRC(三相谐振转换器)。
将其拖放到画布上。
将电池连接到逆变器。
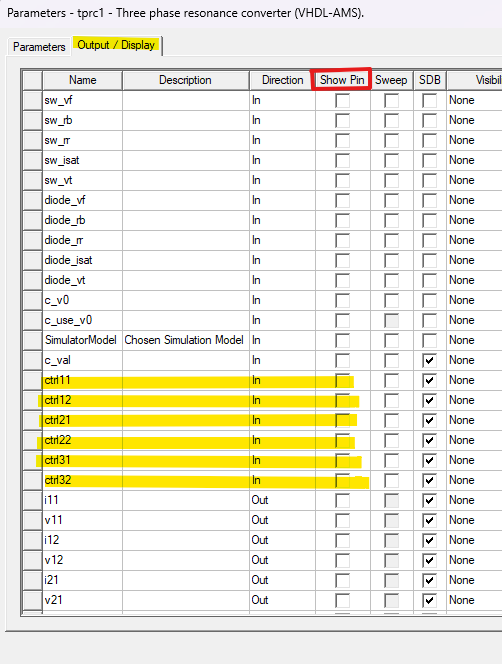
双击逆变器块并转到输出/显示选项卡。取消选中信号以减少电线混乱。
ctrl11/12/21/22/31/32
此时,您的电池已连接到开关单元。稍后将生成控制信号。
让我们将三相逆变器连接到电动机。在本博客中,我们将展示如何耦合有限元模型,在接下来的博客中,我们将展示如何提取电动机的等效电路以在 Simplorer 中使用以实现更快的仿真。
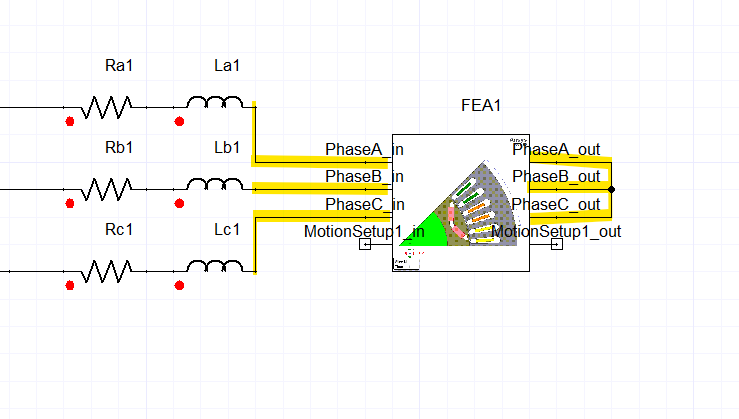
1.2 Maxwell-Simplorer 耦合
在继续之前,请注意以下事项:
如果您的绕组设置为绞合,麦克斯韦不会计算电阻和电感。
您需要手动插入:
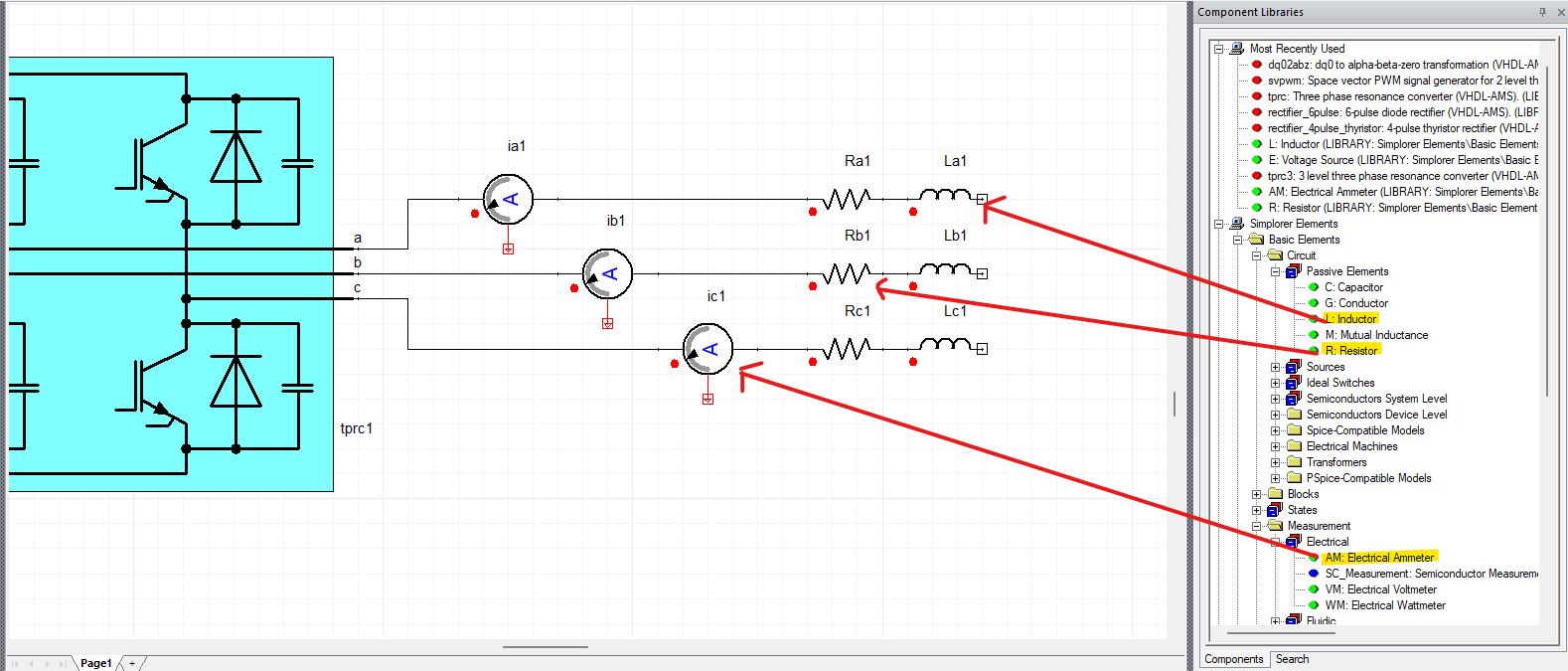
电阻 = 5 mΩ
电感 = 5 μH
使用元件库添加这些元件,以及电流表来测量相电流——这将有助于控制器反馈。
注意:如果您的绕组是实心绕组(例如发夹式),Maxwell 将自动计算电阻和电感,可以跳过此步骤。
第 1 步:启用 Maxwell 耦合
在 Maxwell 中打开您的电机模型。
确保 Simplorer 和 Maxwell 设计都属于同一项目。
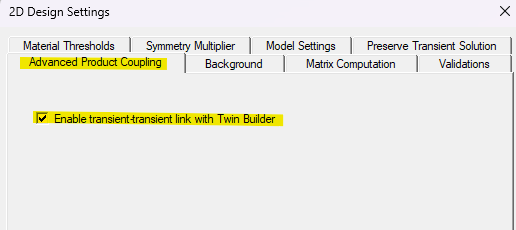
在麦克斯韦:
转到 Maxwell 2D > 设计设置>高级产品耦合
启用瞬态-瞬态链路
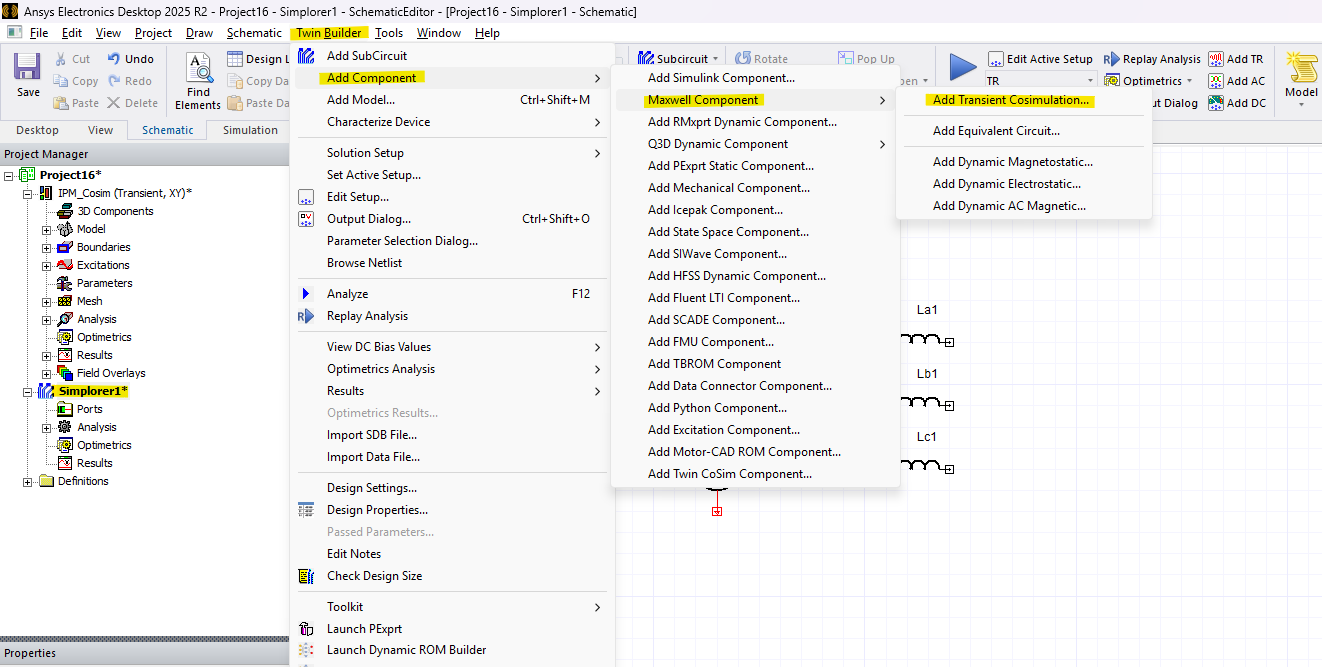
第 2 步:将 Maxwell 模型添加到 Simplorer
在 Simplorer 中:
转到
Twin Builder > Add Component > Maxwell Component > Add Transient Cosimulation…
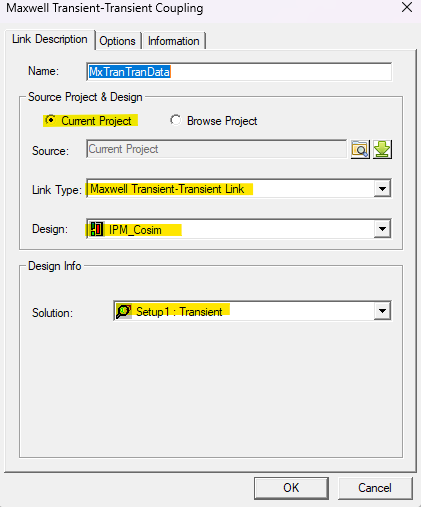
确保选择了正确的 Maxwell 项目和解决方案,然后单击确定。
3. 将模型放在电路画布上。
4. 连接相端子并将电机配置为星形连接(或根据需要进行三角形连接)。
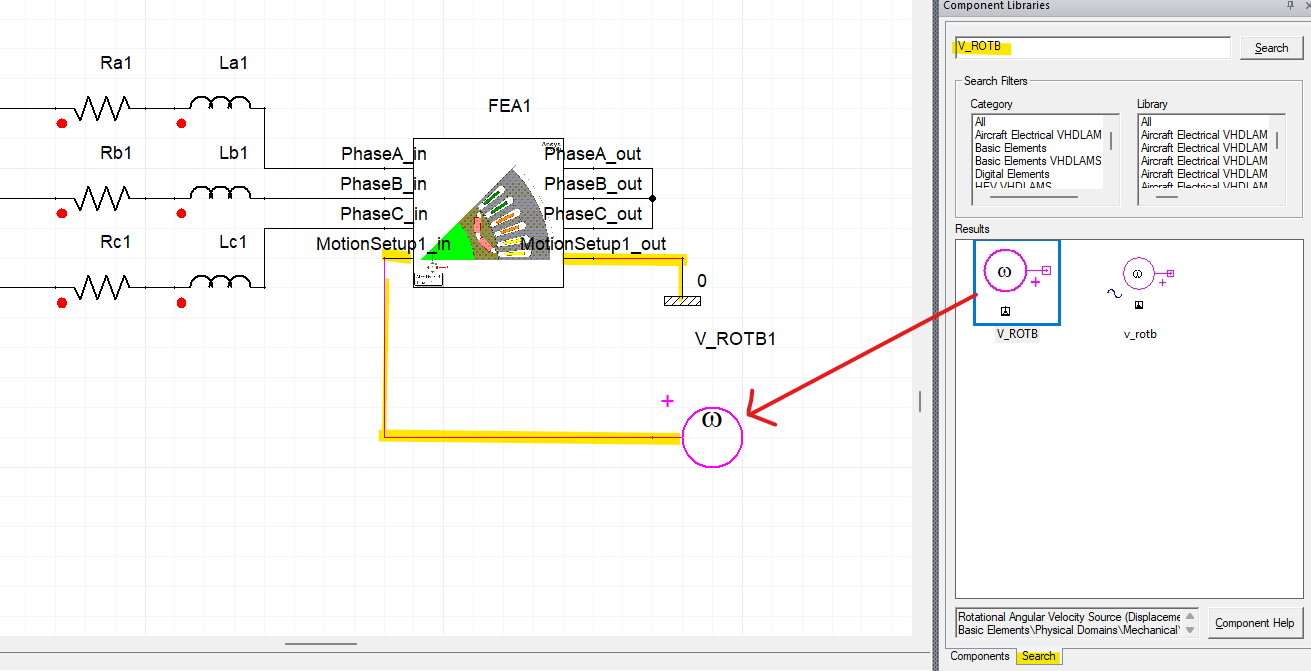
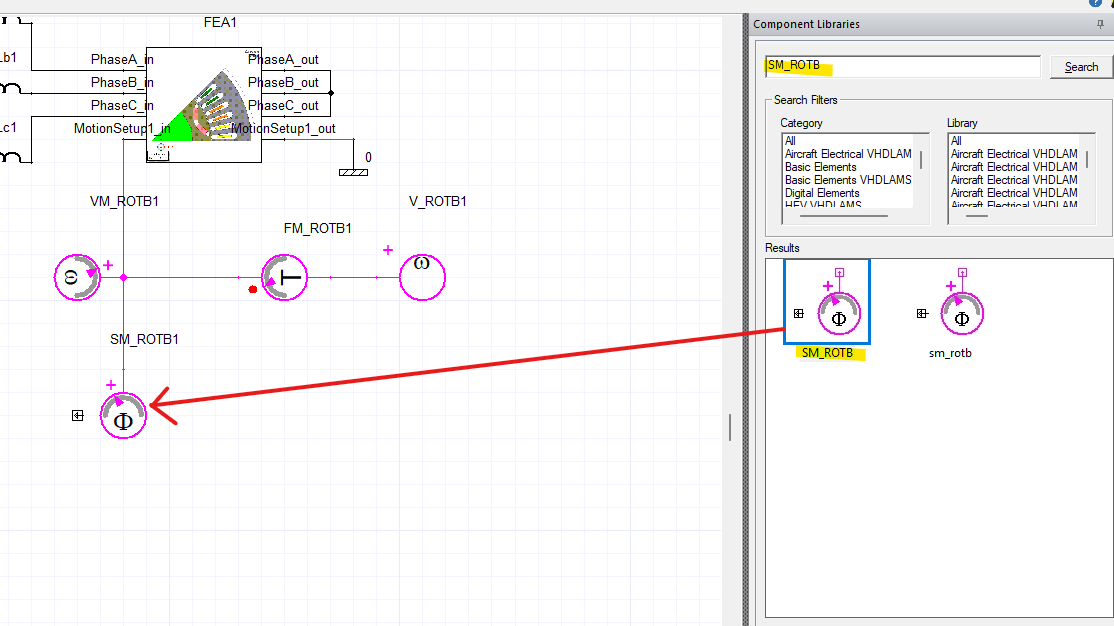
1.3 Simplorer 运动和测量设置
要模拟电机的运动:
在元件库中搜索V_ROTB。
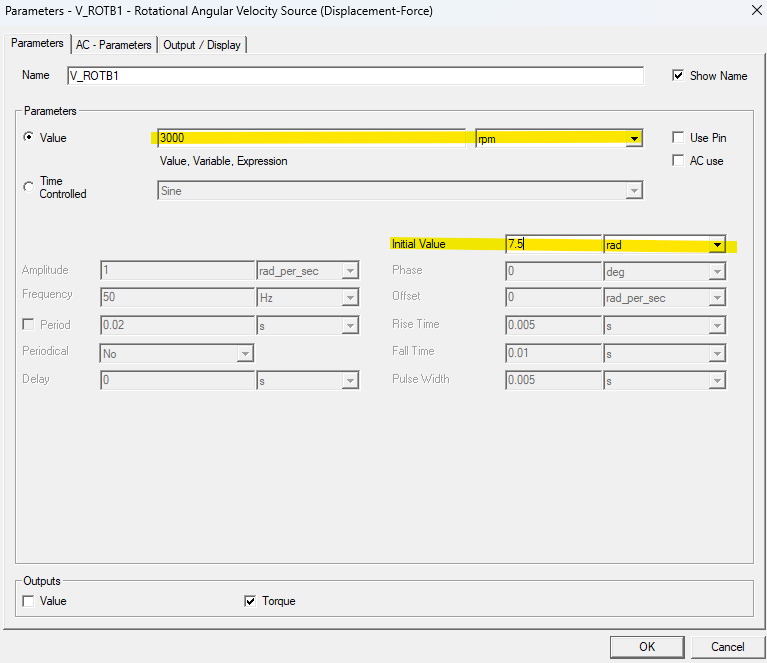
将其连接到以提供角速度(例如,3000 rpm)。
MotionSetup1_in将初始角度设置为 7.5°。
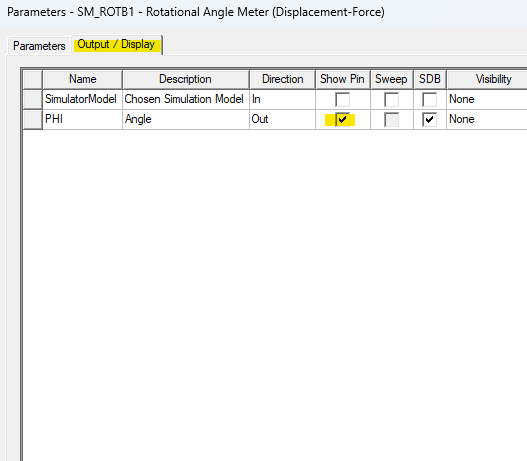
要测量旋转:
将平行于旋转输入的VM_ROTB添加。
如果您想观察扭矩,请串联添加FM_ROTB。
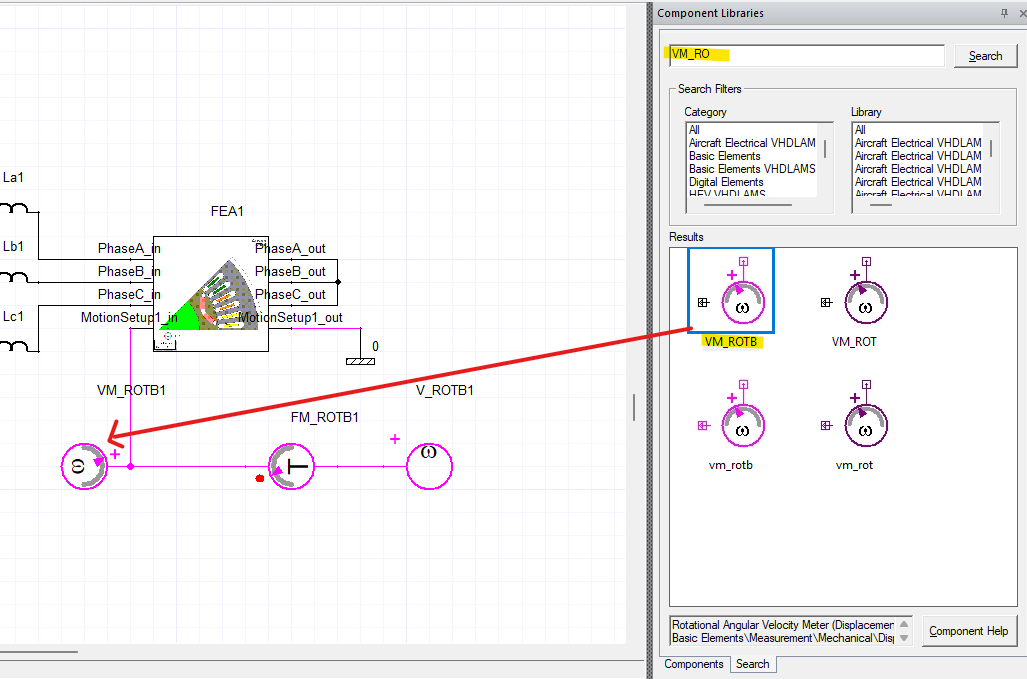
- 使用SM_ROTB测量角速度。勾选角度输出的“show pin”,并将其用于控制逻辑。
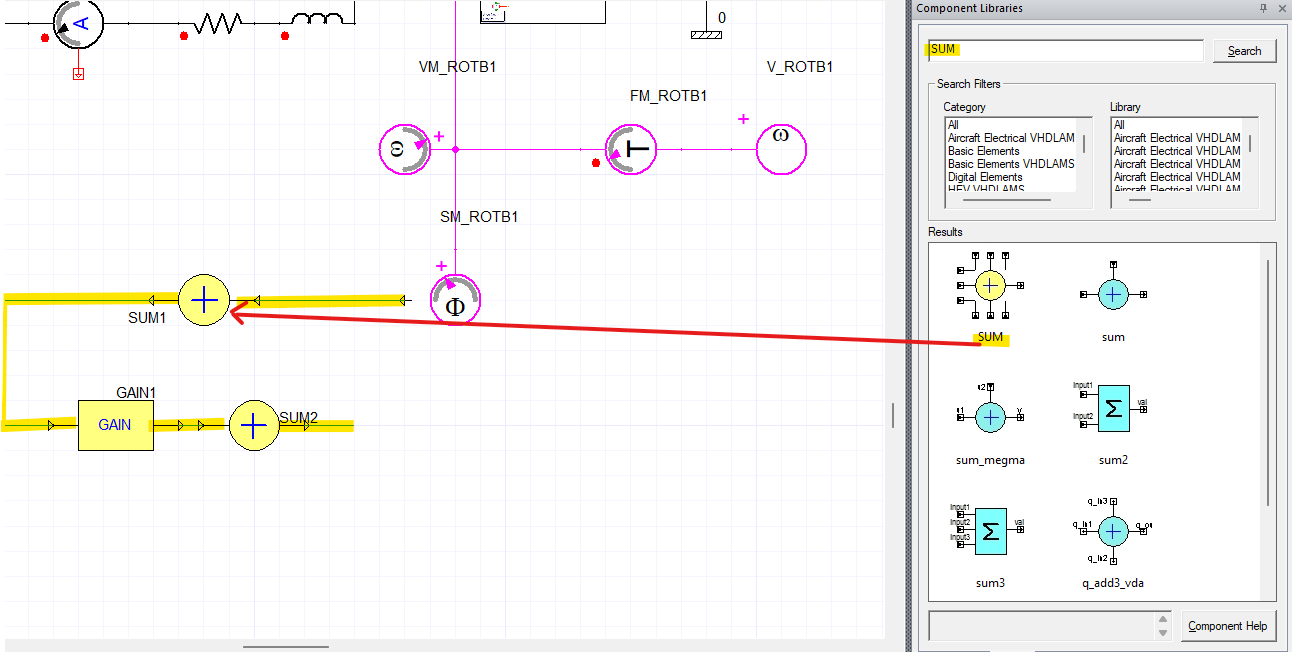
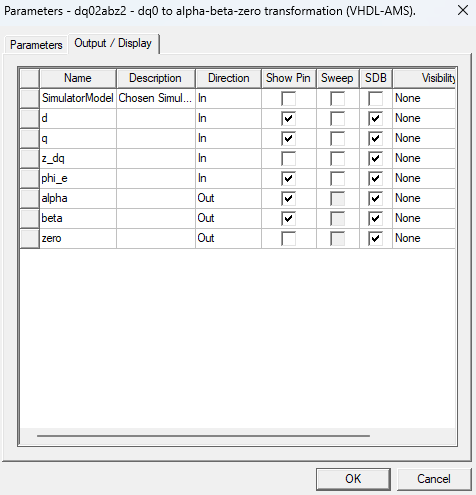
1.4 电角转换
要将机械角度转换为电气角度:
用:
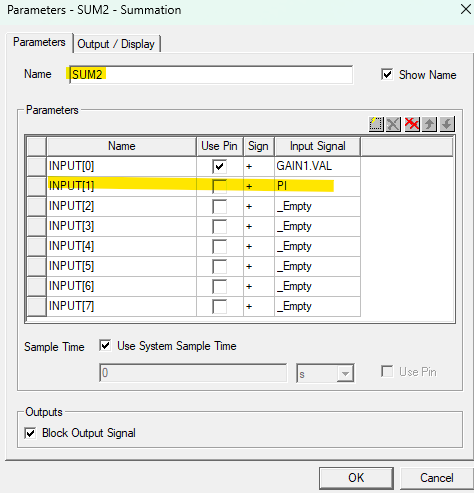
一个 SUM 块减去 7.5° 偏移量。
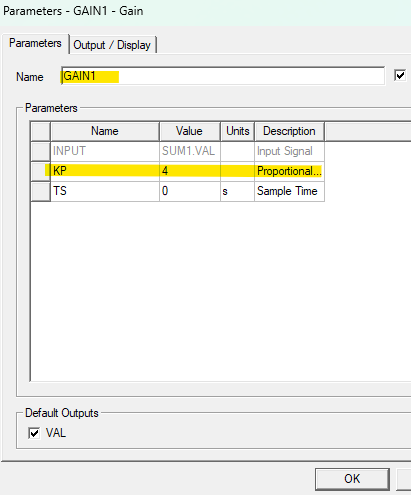
一个 GAIN 块乘以极对数。
用于相位校正的最后一个 SUM 块。
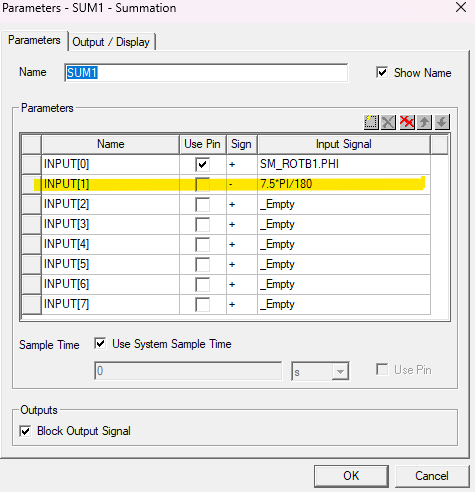
第一个求和块用于校正电机的初始电角,我们之前将其设置为 7.5°。要调整此设置,请执行以下作:
双击块,将“+”号更改为“-”以减去偏移量,
输入信号 2,
7.5*PI/180取消选中“显示图钉”以获得更简洁的布局。
Gain 块用于通过将机械角乘以极对数来将机械角转换为电角。
最终求和块应用相位反转,这是 Clarke/Park 变换所必需的。
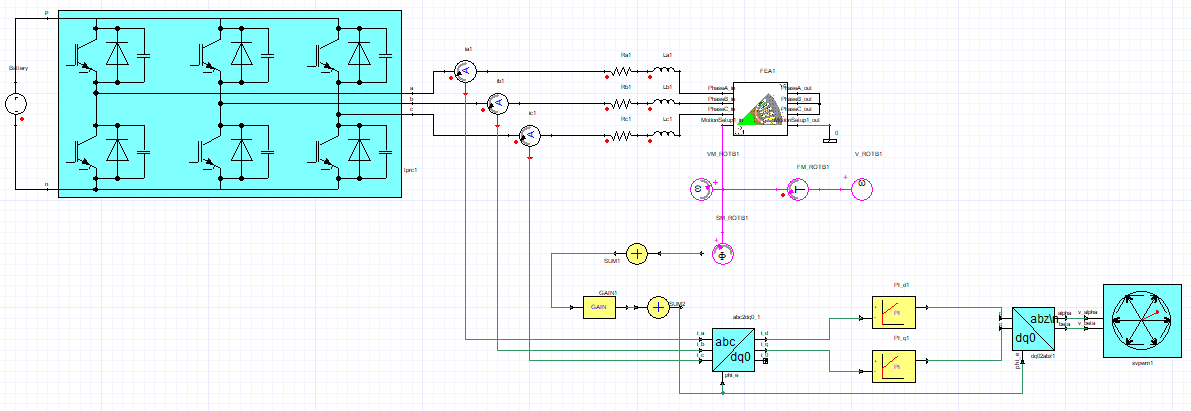
您的最终配置应如下图所示。
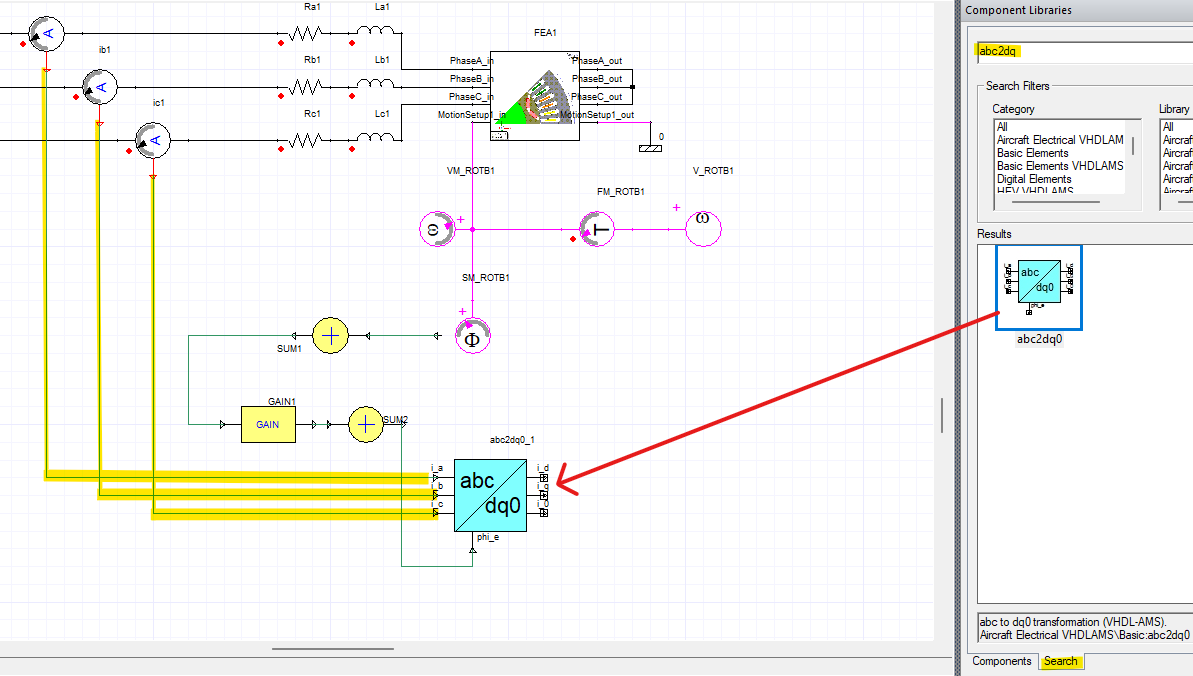
1.3. 公园改造
由于我们已经有了转子的旋转位置,我们可以将 ABC 相电流转换为控制算法中常用的 DQ 分量。
Ansys Simplorer为此提供了一个即用型模块:
在组件库中搜索
abc2dq。将其拖到电路工作区中,并将其连接到相电流信号,如图所示。
(提示:您可以使用引脚名称而不是导线来保持图表在视觉上干净和有条理。
这将使您能够在控制器设计中使用 DQ 电流。
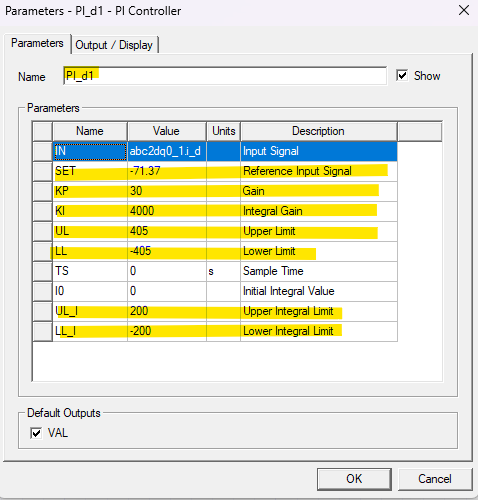
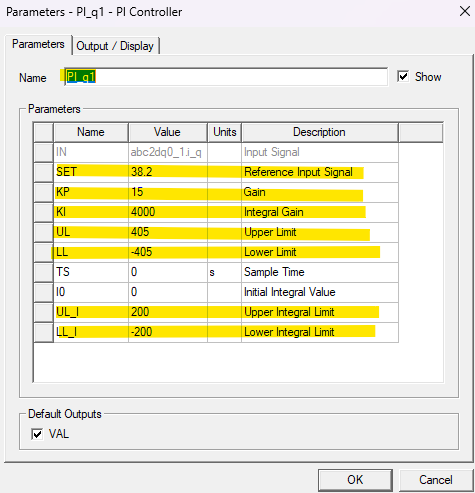
1.6 电流控制器
控制和电流:idiq
搜索PI_并拖动两个块。
将输出连接到 PI 控制器。
abc2dq
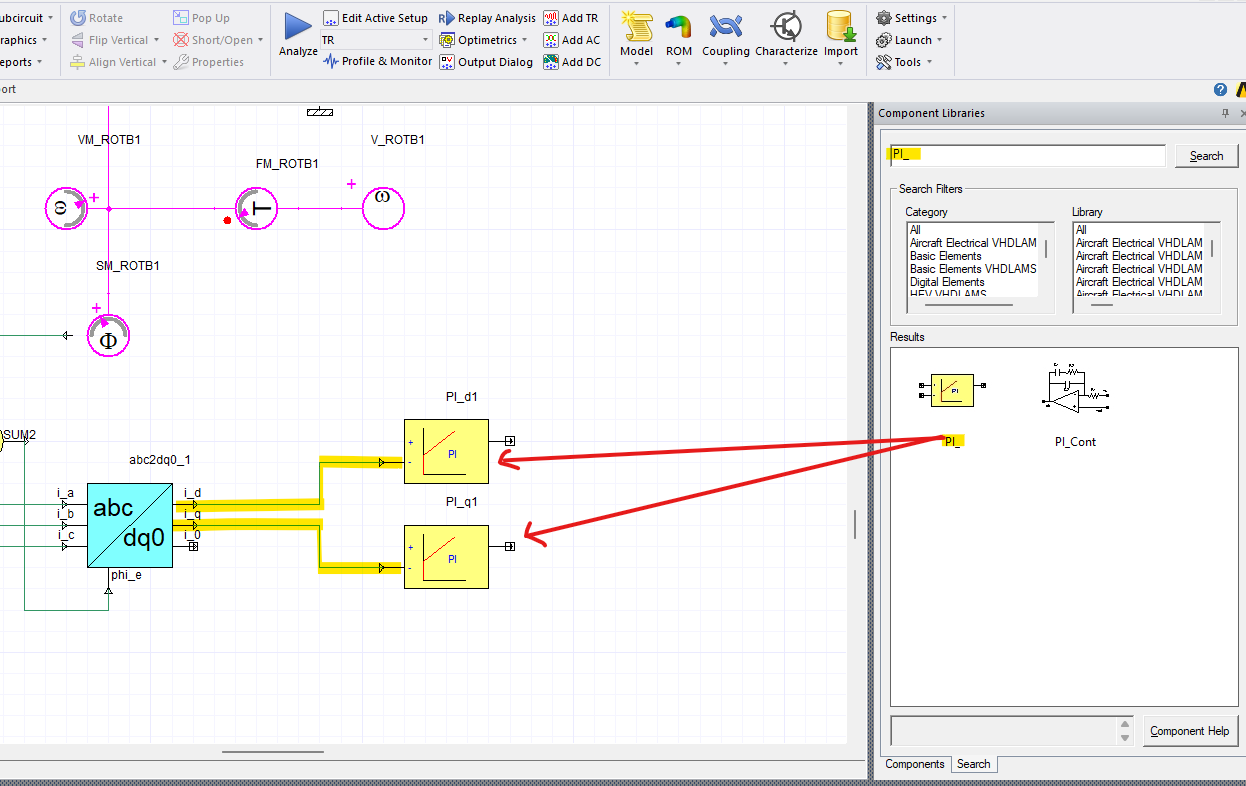
您可以为 d 轴和 q 轴 PI 控制器分配如下所示的值。在此设置中,d 和 q 电流的输入信号是手动分配的。但是,您可以通过实施磁场定向控制 (FOC) 算法来进一步改进模型,该算法根据您的扭矩或速度命令动态预测电流参考,并将这些输出连接到 PI 控制器的参考输入。
请注意,提供的 PI 值是针对此特定电机和逆变器组合进行调整的,您可能需要调整它们以适应您自己系统的参数。
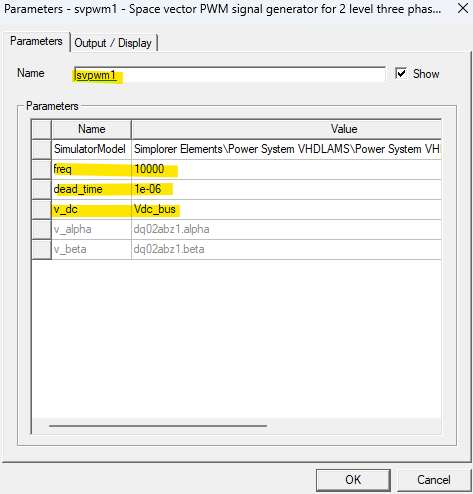
1.7 SVPWM 和最终切换
要生成开关信号:
添加 dq02abc 和 SVPWM 块。
按以下顺序连接它们:
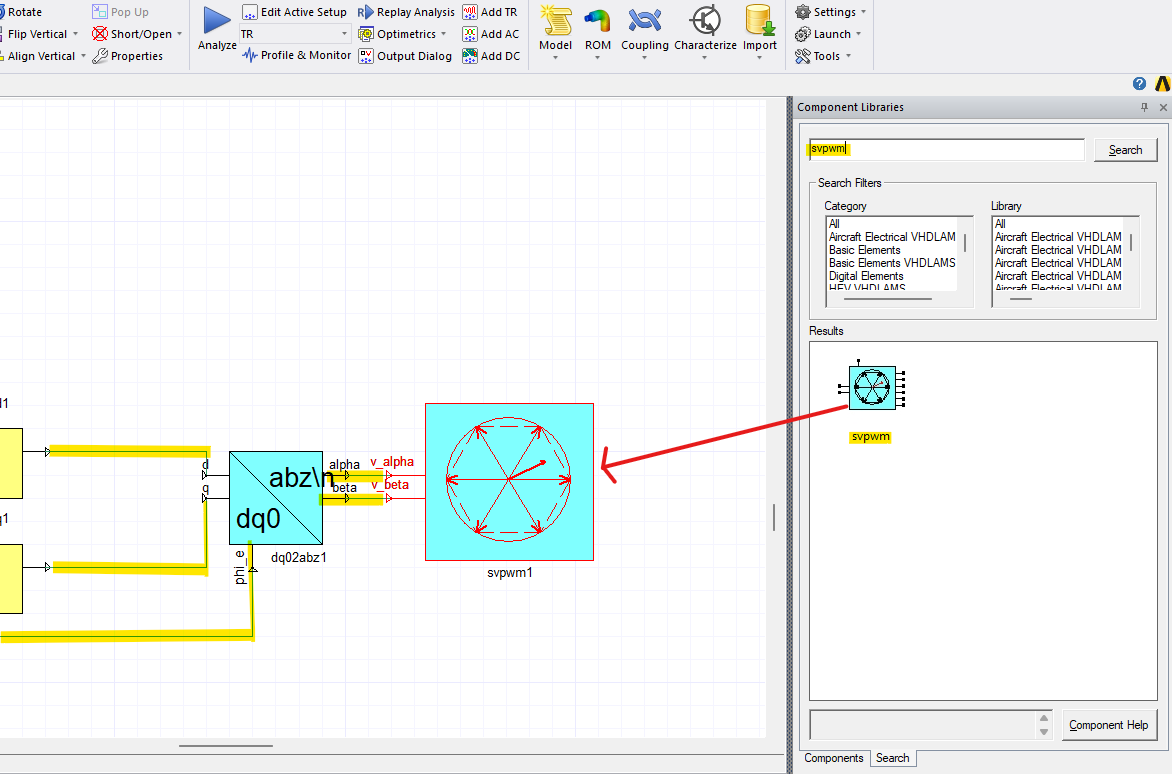
3. 在 SVPWM 中:
取消选中“z”引脚和零输入。
设置:
freq= 10,000 赫兹dead_time= 1e-6v_dc=Vdc_bus(之前设置的参数)
v
现在我们已经结束了三相SVPWM逆变器与FEA耦合的电路。
1.8 最终设置
双击 TPRC 逆变器块。
分配: svpwm1.t1、svpwm1.t2 等开关信号。
3、设置分析参数:
结束时间 = 10 毫秒
最小/最大步长 = 4 μs
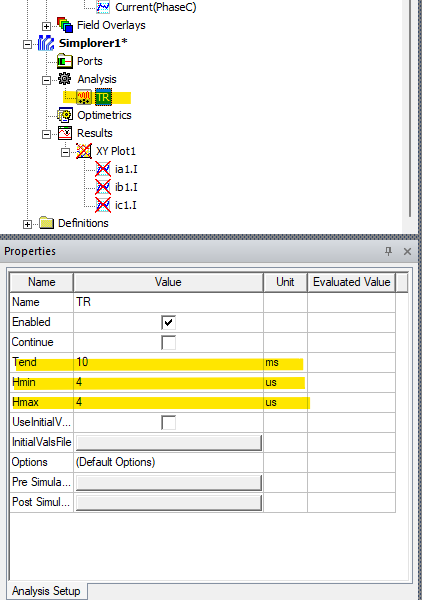
结果
您的模拟设置现已完成并可以运行!
模拟时间
继续运行模拟。根据步长、求解器设置和模型复杂性,仿真可能需要 10 到 60 分钟。
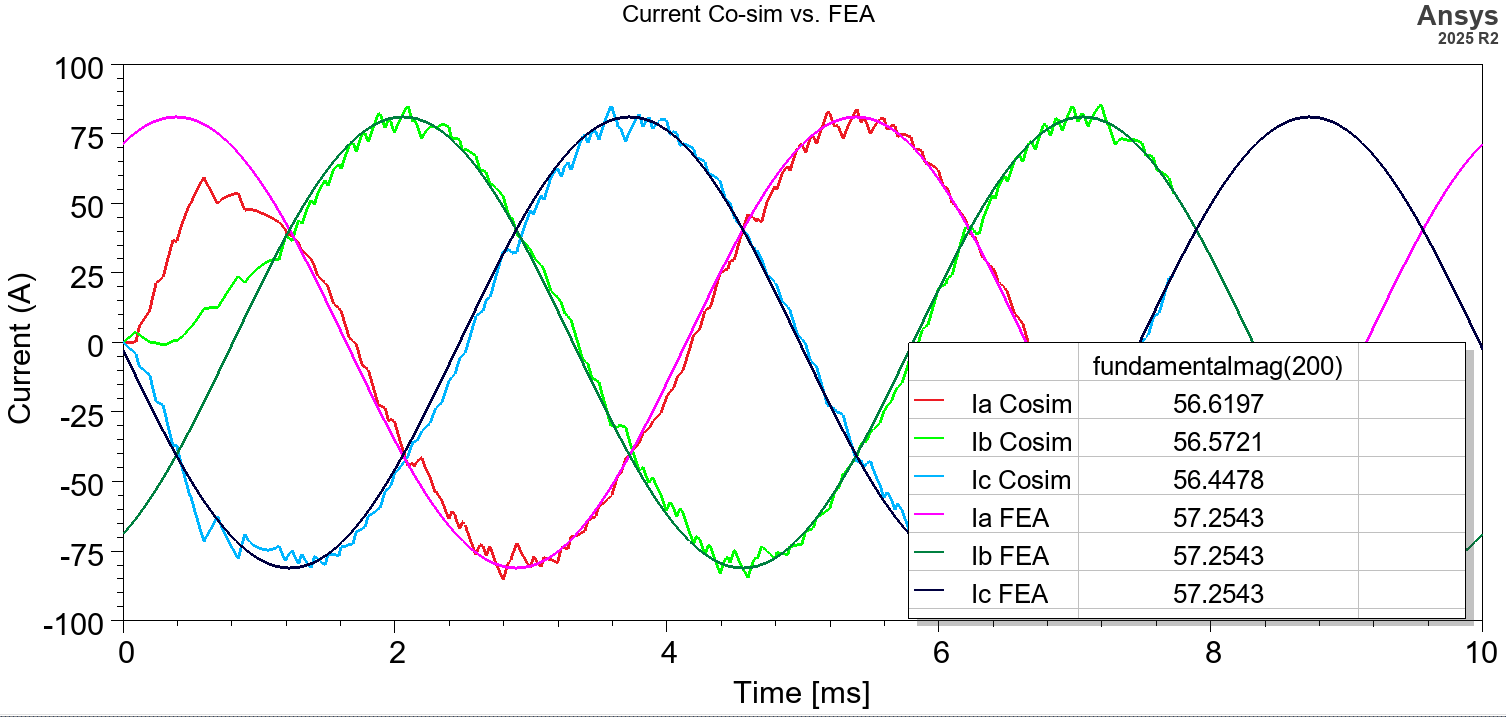
相电流比较
纯正弦激励和逆变馈电激励的相电流如下图所示。从结果可以看出,基波幅度相同,确认逆变器工作正常并生成所需的波形。
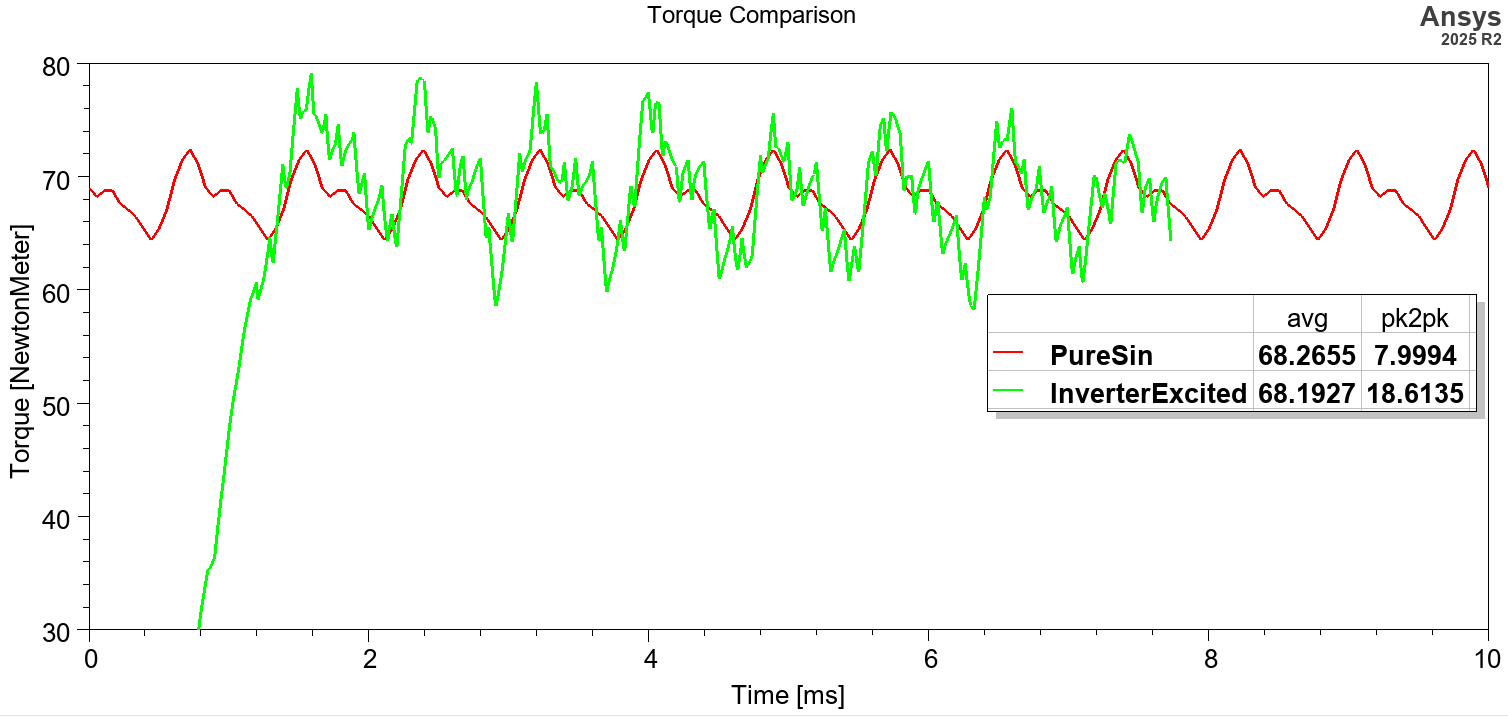
扭矩比较
在两种激励方法下,还分析了 3000 rpm 下的扭矩输出:
平均扭矩在两次模拟中保持一致。
然而,与纯正弦模型相比,逆变器馈电模型表现出更高的转矩纹波,峰峰值变化大约增加 15%。
这种增加的纹波是由于逆变器的开关行为引入的谐波成分造成的。
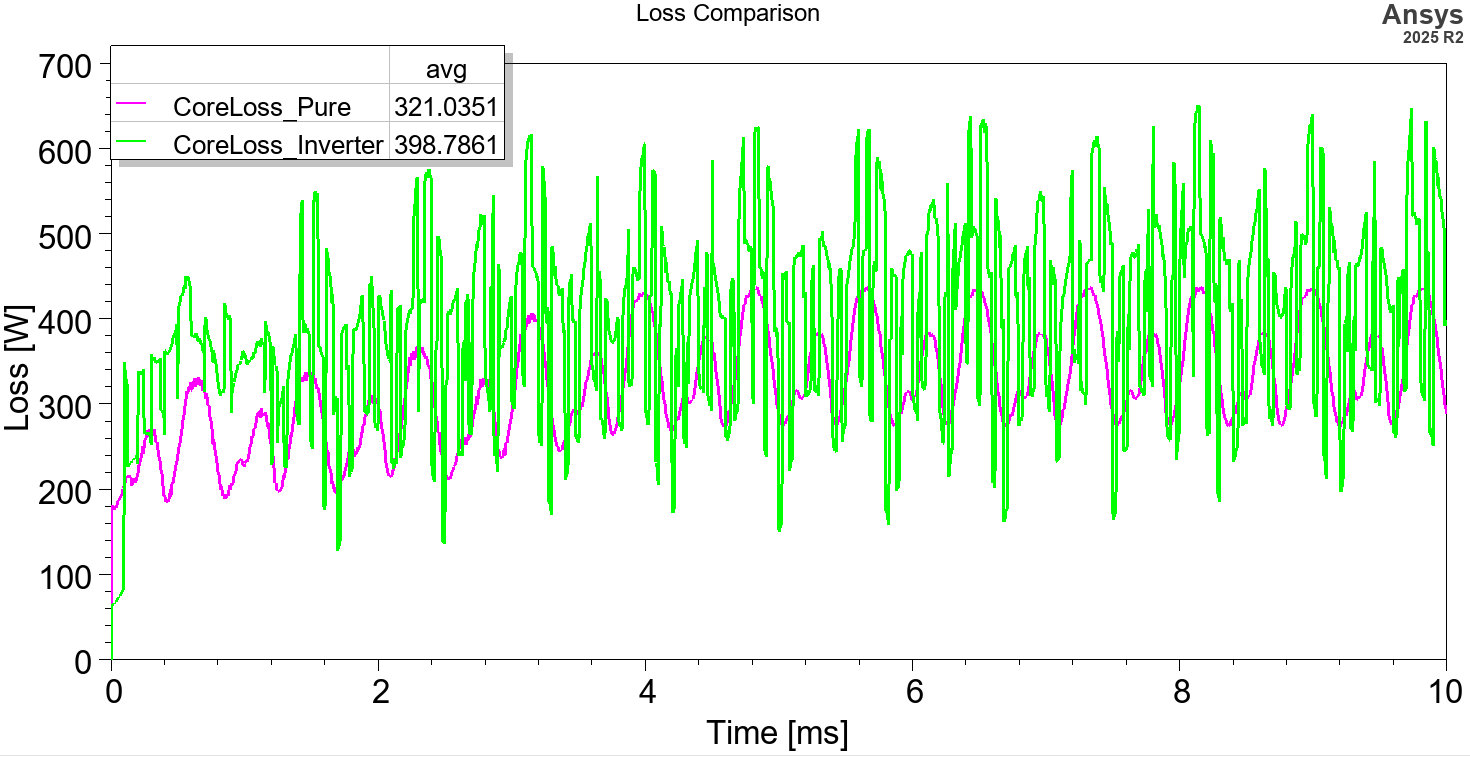
核心损耗比较
比较两种激励场景之间的铁芯损耗时:
逆变馈电模型导致的磁芯损耗比纯正弦激励高出约 24%。
这种增加可归因于脉宽调制 (PWM) 开关产生的额外高频谐波,这提高了磁芯中的局部涡流和滞后效应。
1.1 并网三相逆变器
为了对并网逆变器系统进行建模,我们将用交流电网输入替换直流电池电源,并添加一个整流级。
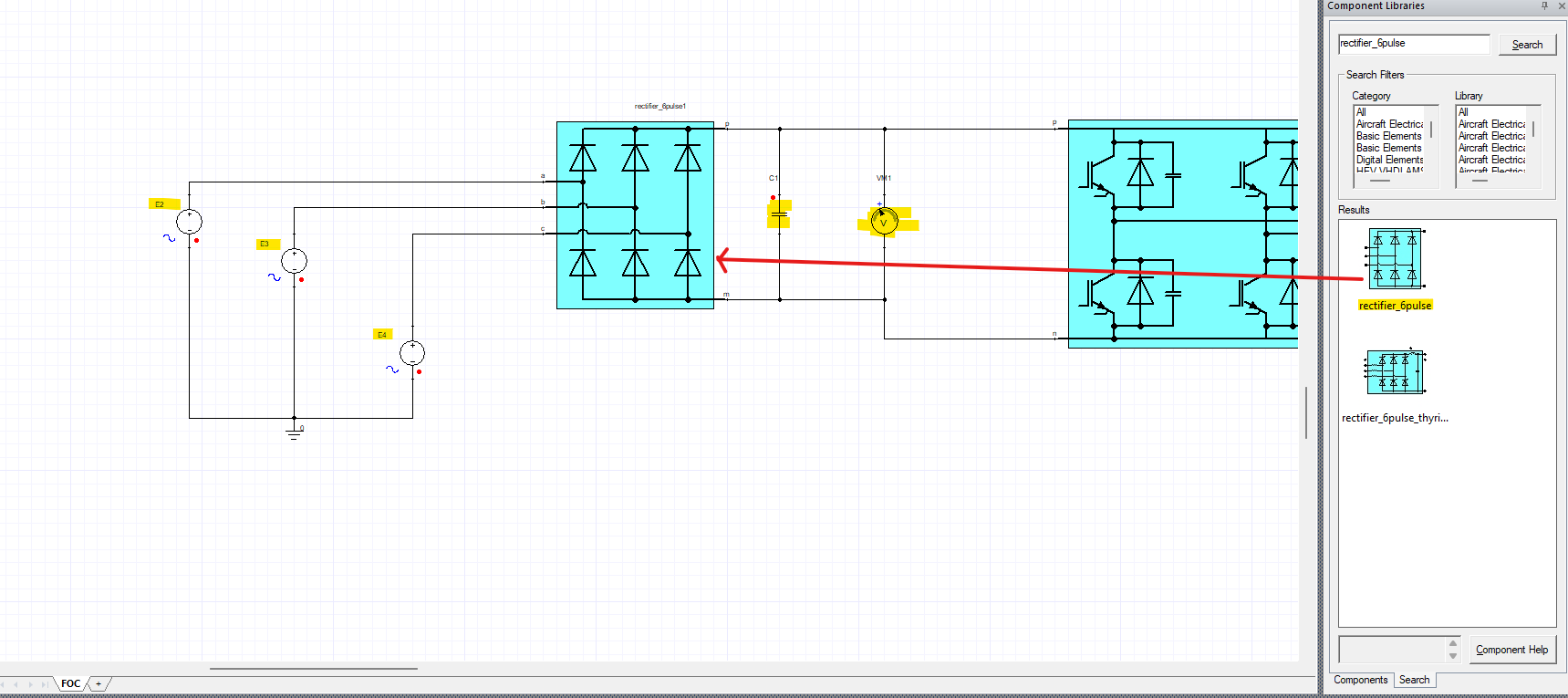
第 1 步:添加交流电网源和整流器
移除直流电压源(电池)在上一节中使用。
从元件库中,搜索并添加三相交流电压源。
然后,搜索
rectifier_6pulse并将其拖到工作区上。在整流器输出端子之间添加一个滤波电容器(例如,1 mF)。
将交流电源连接到整流器输入端,并将电容器连接到整流器输出端。
第 2 步:直流母线电压
在电容器两端添加一个电压表以监控直流链路电压。
将测量值重命名为 ,并将其用作逆变器设置中的参考,而不是固定的 450 V。
VM1.VVdc_bus
此设置将三相交流输入转换为平滑的直流电压,为逆变器供电。

祝贺!您的逆变器现已连接到电网并准备好进行模拟。
结论
本博客演示了如何在Ansys Simplorer中构建三相逆变器系统,并将其与Ansys Maxwell的详细电磁模型耦合。结果证实,与纯正弦源相比,逆变器馈电系统在平均转矩方面表现相当,同时也突出了由于PWM开关在转矩纹波和铁芯损耗方面的重要差异。
将系统级控制和驱动电路与详细的有限元模型相结合对于准确捕获现实世界的行为至关重要,尤其是在电动机应用中。该工作流程不仅可以实现更精确的损耗和扭矩分析,还支持开发 FOC(磁场定向控制)等高级控制策略。
Ansys Simplorer和Maxwell提供了强大的协同仿真功能,提供了一个统一的环境来评估设计中的电气、磁和控制相互作用。无论您是要优化性能、验证控制逻辑,还是探索未来阶段的热和 NVH 影响,这种灵活且集成的工具链都能确保您能够高效、准确地完成这一切。
请继续关注下一篇博客,我们将展示如何从 Maxwell 中提取等效电路模型并在 Simplorer 中使用它来进行更快的仿真。