Python vs MATLAB:智能体开发实战对比
前言:一般还是用python,环境和算法其实都需要改,用matlab不方便实现。
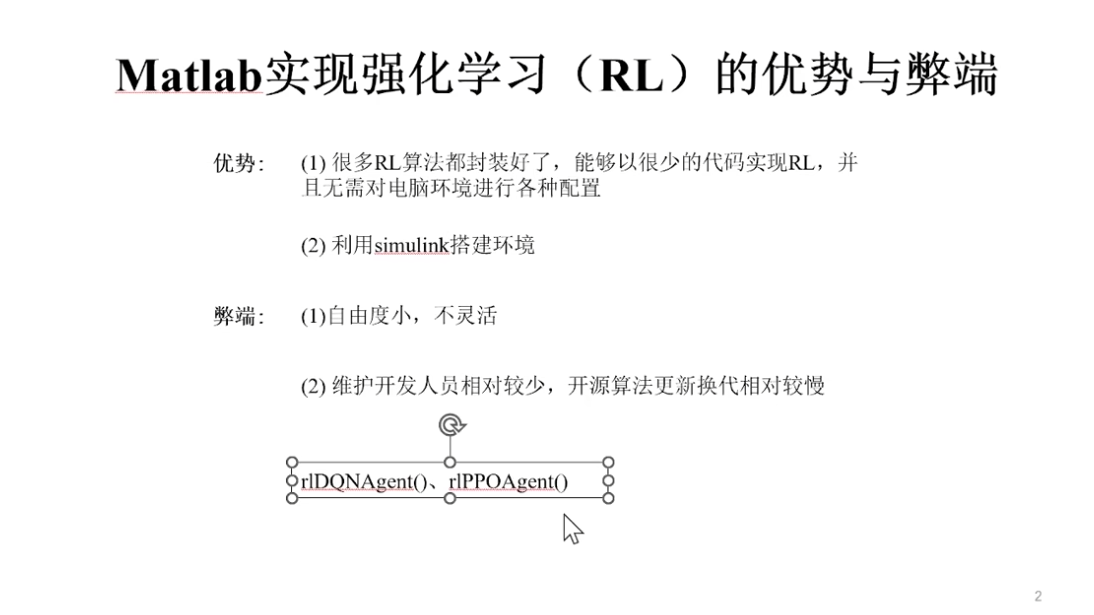
1.创建智能体
simulink搭建环境
但是封装了不好修改;
2.matlab中预定义的环境
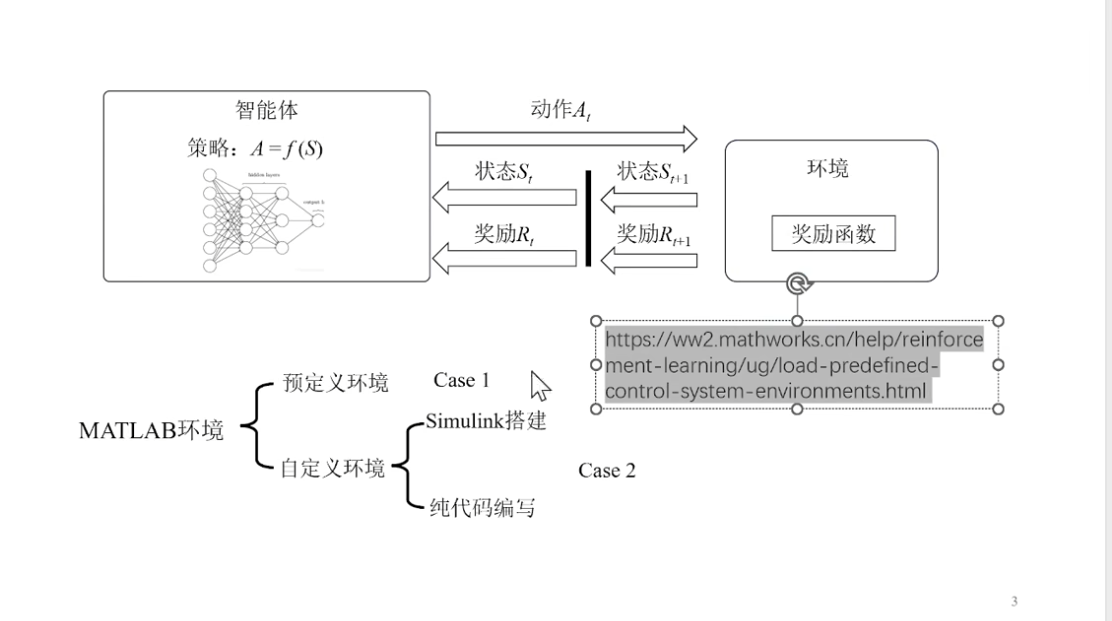
单摆

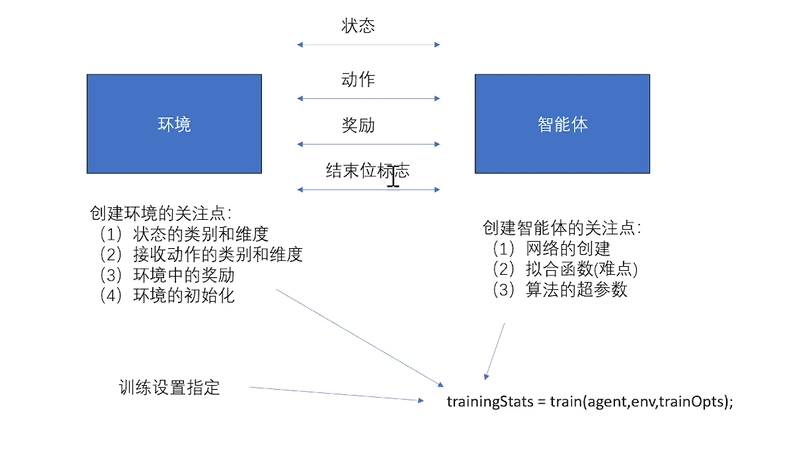
3.程序编写流程
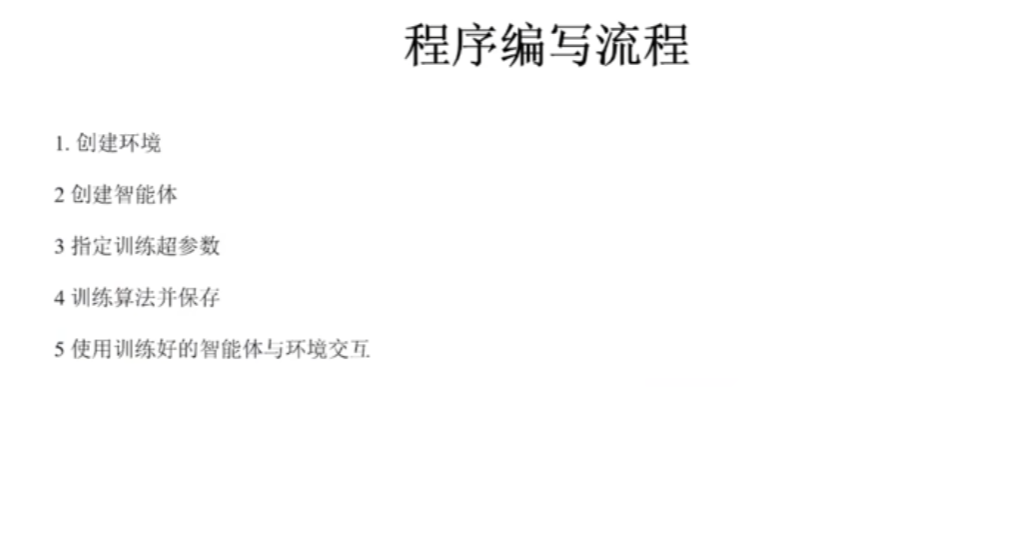
创建环境

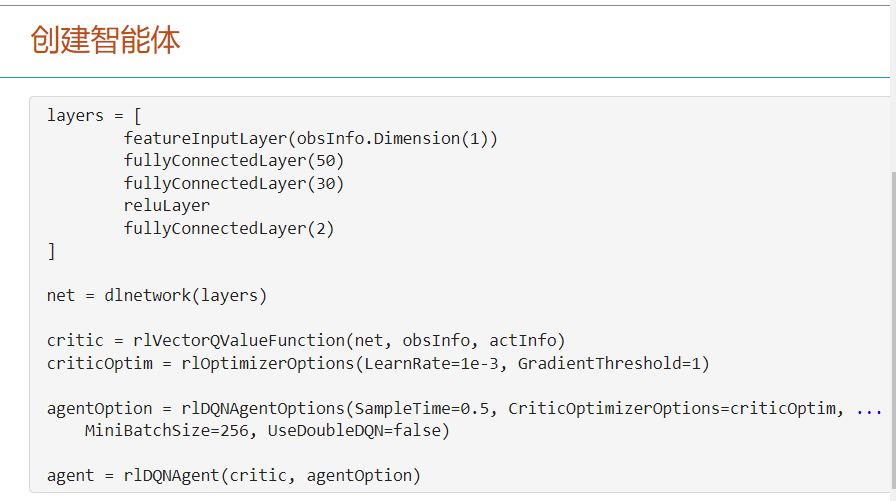
创建智能体
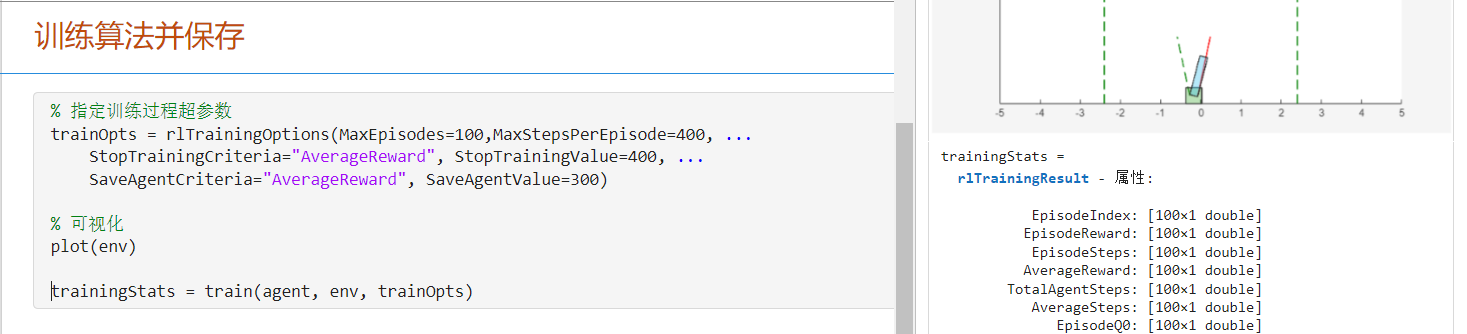
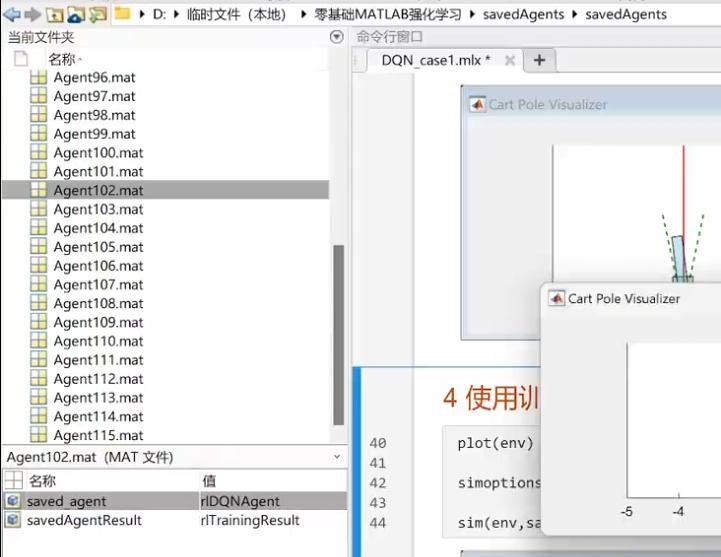
训练参数及保存
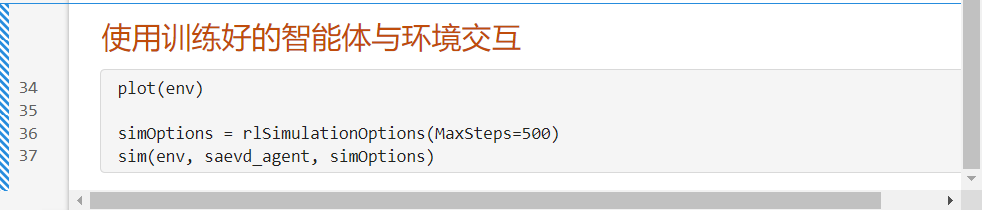
使用训练好的智能体交互
4.总结
前言:一般还是用python,环境和算法其实都需要改,用matlab不方便实现。
simulink搭建环境
但是封装了不好修改;
创建环境
创建智能体
训练参数及保存
使用训练好的智能体交互