电机控制(二)-控制理论基础
控制方法
什么是控制?控制系统环路的三要素:基准,反馈,输出
关于控制:控制理论存在于任何工科甚至商科,控制的应用由来已久,但是控制理论起源于1940年,框图,传递函数等传统控制理论。从1960年开始,随着太空探索、电子控制器以及非线性系统的越来越多,控制的研究范式从传递函数转向了状态空间,也就是现代控制理论,随之衍生出了最优控制,非线性控制,卡尔曼滤波等。1980年随着对稳定性的要求越来越高,开始进行鲁棒控制研究。2000年随着单片机和个人电脑的普及,低成本控制。2020年随着算力成本不断降低以及人形机器人热,强化学习开始大放光彩。
现代控制vs经典控制
控制根据研究方法可以分为经典控制理论和现代控制理论。
经典控制理论中,对于连续时间控制,采用拉普拉斯变换得到传递函数,进行频域分析。对于离散时间控制,采用z变换得到传递函数进行分析
拉普拉斯变换是连续时间信号分析的核心工具,用于将连续域的 “微分方程” 转化为复频域的 “代数方程”,解决连续系统(如模拟电路、机械系统)的分析问题。关于拉普拉斯变换可以看傅里叶变换和拉普拉斯变换
z变换:z 变换是离散时间信号(序列) 分析的核心数学工具,类比于连续时间信号的拉普拉斯变换,其核心作用是将离散域的 “差分方程” 转化为复频域的 “代数方程”,大幅简化离散系统的分析(如稳定性、频率响应、滤波设计)。
z 变换的本质是 “将离散序列分解为复指数序列的加权和”:
现代控制理论中,对被控系统进行建模,得到一个状态空间模型,与经典运动控制算法相比,现代控制理论可以处理多输入多输出MIMO系统。
现代控制理论与经典控制理论核心区别源于对系统的描述方式、数学工具、研究对象及设计目标的不同。经典控制理论聚焦“输入-输出”的外部特性,现代控制理论则深入“状态”的内部机制,二者并非替代关系,而是适用于不同复杂度的系统场景。
| 对比维度 | 经典控制理论(20世纪40-50年代) | 现代控制理论(20世纪60年代后,以卡尔曼滤波、庞特里亚金原理为标志) |
|---|---|---|
| 1. 系统描述模型 | 基于“输入-输出”的传递函数模型(复频域,拉普拉斯变换导出) 本质是“黑箱/灰箱”模型,不考虑系统内部状态。 | 基于“状态-输入-输出”的状态空间模型(时域,线性微分方程组) 本质是“白箱”模型,直接描述内部状态的动态变化。 |
| 2. 核心数学工具 | 复变函数(拉普拉斯变换、傅里叶变换)、复频域分析 辅助工具:根轨迹法、奈奎斯特判据、伯德图。 | 线性代数(矩阵论、向量空间)、时域微分方程 辅助工具:能控性/能观性理论、变分法、庞特里亚金极小值原理、卡尔曼滤波。 |
| 3. 研究对象范围 | 仅限单输入-单输出(SISO) 、线性时不变(LTI) 系统 无法处理非线性、时变、多变量耦合系统。 | 支持多输入-多输出(MIMO) 系统,可处理线性时变(LTV) 、非线性系统 对耦合系统(如飞机姿态控制:俯仰/滚转/偏航耦合)的描述更精准。 |
| 4. 设计方法特点 | 经验试凑法:基于工程师经验调整参数(如根轨迹法调增益、频域法加校正装置) 目标是“满足稳定裕度、动态/稳态性能”,无严格最优性。 | 系统化设计法:基于数学推导的定量设计(如极点配置、LQR最优控制、观测器设计) 目标可定制(如最小能耗、最短时间、鲁棒性最优),设计过程更规范。 |
| 5. 关键分析能力 | 仅分析外部性能: - 稳定性(劳斯判据、奈奎斯特判据) - 动态性能(超调量、调节时间) - 稳态性能(稳态误差) | 兼顾外部性能+内部状态分析: - 新增“能控性”(控制输入能否影响所有内部状态)、“能观性”(输出能否反映所有内部状态) - 可分析状态收敛性、抗干扰能力、鲁棒性(应对参数摄动)。 |
| 6. 适用场景 | 简单线性系统:如单电机调速、单回路温度控制、单轴机械臂 工业中“单回路PID控制”是经典理论的典型应用。 | 复杂系统:如导弹姿态控制(MIMO+时变)、卫星轨道控制(最优能耗)、自动驾驶(多传感器融合+非线性)、多机器人协同 需精准控制内部状态或追求最优性能的场景。 |
最根本区别:“输入-输出” vs “状态”
-
经典控制理论:只关心“给系统一个输入,会得到什么输出”,比如给电机加10V电压(输入),电机转速达到1000rpm(输出),至于电机内部的电流、温度等状态,完全不考虑。
例:用传递函数G(s)=1000s+10G(s) = \frac{1000}{s+10}G(s)=s+101000描述电机转速与电压的关系,无法体现电流变化。 -
现代控制理论:必须明确“系统内部有哪些关键状态”,并通过状态方程描述状态的变化规律。
例:电机的状态包括“转速 ( \omega )”和“电枢电流 ( i )”,状态方程为:
{ω˙=−k1ω+k2ii˙=−k3i+k4u\begin{cases} \dot{\omega} = -k_1 \omega + k_2 i \\ \dot{i} = -k_3 i + k_4 u \end{cases} {ω˙=−k1ω+k2ii˙=−k3i+k4u
uuu 为输入电压,k1,k2,k3,k4k_1,k_2,k_3,k_4k1,k2,k3,k4为电机参数),输出方程可设为 y=ωy = \omegay=ω(仅输出转速)。
设计逻辑:“经验调参” vs “定量最优”
- 经典控制:设计依赖工程师经验。比如用根轨迹法设计控制器时,需要反复调整增益,让闭环极点落在“期望的性能区域”(如阻尼比0.4~0.8,无超调或小超调),过程是“试凑+验证”。
- 现代控制:设计基于严格的数学优化。比如用LQR(线性二次型调节器) 设计时,只需定义“性能指标”(如“转速误差平方+控制电压平方的积分最小”,即兼顾精度和能耗),通过求解黎卡提方程可直接得到最优控制律,无需试凑。
适用边界:“简单单变量” vs “复杂多变量”
- 经典控制面对多变量系统(如飞机的俯仰、滚转、偏航三个通道耦合)时,会出现“耦合干扰”——调整一个输入,多个输出都会变化,无法独立控制,因此完全失效。
- 现代控制通过状态空间模型可直接描述耦合关系,再通过“解耦控制”或“状态反馈”消除耦合,比如飞机姿态控制中,通过状态反馈矩阵同时调整三个通道的控制量,实现独立稳定。
经典控制是现代控制的“特例”:当系统为SISO-LTI(单输入单输出时不变系统)时,状态空间模型可通过拉普拉斯变换导出传递函数,即经典控制的模型是现代控制模型的“输入-输出投影”。工程中常结合使用:复杂系统的局部简单回路(如卫星的温度控制子回路)仍用经典PID(简单、可靠),而整体姿态控制(多变量耦合)用现代控制(如状态反馈+观测器)。
经典控制理论
经典控制的主要工具是传递函数,方框图,奈奎斯特图以及伯德图。所有工具均围绕 “LTI 系统的稳定性、动态性能、稳态性能” 三大核心目标展开。主要从频域和时域分析展开。
频域分析
频域分析通过系统对不同频率正弦输入的响应(幅频特性、相频特性),间接评估稳定性与性能,核心工具如下:
频率特性(Frequency Response)
对于LTI系统,输入正弦信号,输出的频率不会发生变化,但是幅值和相位可能会发生变化。
系统对正弦输入的稳态响应:若输入为u(t)=Asin(ωt)u(t) = A\sin(\omega t)u(t)=Asin(ωt),则输出稳态为y(t)=A⋅A(ω)⋅sin(ωt+φ(ω))y(t) = A \cdot A(\omega) \cdot \sin(\omega t + \varphi(\omega))y(t)=A⋅A(ω)⋅sin(ωt+φ(ω)),幅值和相位的变化等同于将传递函数的sss换为jωj\omegajω(证明自查),即:y(t)=A⋅∣G(jω)∣⋅sin(ωt+∠G(jω))y(t) = A \cdot |G(j\omega)| \cdot \sin(\omega t + \angle G(j\omega))y(t)=A⋅∣G(jω)∣⋅sin(ωt+∠G(jω))其中:
- 幅频特性:∣G(jω)∣|G(j\omega)|∣G(jω)∣,表示输出与输入的幅值比随频率ω\omegaω的变化(反映系统对不同频率信号的“放大/衰减能力”)。
- 相频特性:∠G(jω)\angle G(j\omega)∠G(jω),表示输出与输入的相位差随频率ω\omegaω的变化(反映系统对不同频率信号的“延迟能力”)。
伯德图(Bode Plot)
将幅频特性和相频特性分别绘制的对数坐标图,是工程上最常用的频域工具:
- 幅频特性图:纵轴为20lg∣G(jω)∣20\lg|G(j\omega)|20lg∣G(jω)∣(单位:dB),横轴为lgω\lg\omegalgω(单位:rad/s)
- 采用对数刻度可将“串联系统的幅频特性”转化为“分贝值相加”,大幅简化计算。L(ω)=20lg∣G(jω)∣=20lg∣G1(jω)G1(jω)⋯Gn(jω)∣=L1(ω)+L2(ω)+⋯+Ln(ω)\begin{aligned} L(\omega) &= 20\lg|G(j\omega)| = 20\lg|G_1(j\omega)G_1(j\omega)\cdots G_n(j\omega)| \\ &= L_1(\omega) + L_2(\omega) + \cdots + L_n(\omega) \end{aligned}L(ω)=20lg∣G(jω)∣=20lg∣G1(jω)G1(jω)⋯Gn(jω)∣=L1(ω)+L2(ω)+⋯+Ln(ω)
- 相频特性图:纵轴为∠G(jω)\angle G(j\omega)∠G(jω)(单位:°),横轴与幅频图一致。
- 核心应用:
- 读取增益裕量(GM):系统达到临界稳定时,幅频特性需额外衰减的分贝值(GM>0dB表示稳定)。
- 读取相位裕量(PM):系统达到临界稳定时,相频特性需额外滞后的相位值(PM>0°表示稳定)。
- 快速设计校正装置(如超前校正、滞后校正),通过调整伯德图形状改善稳定性和性能。
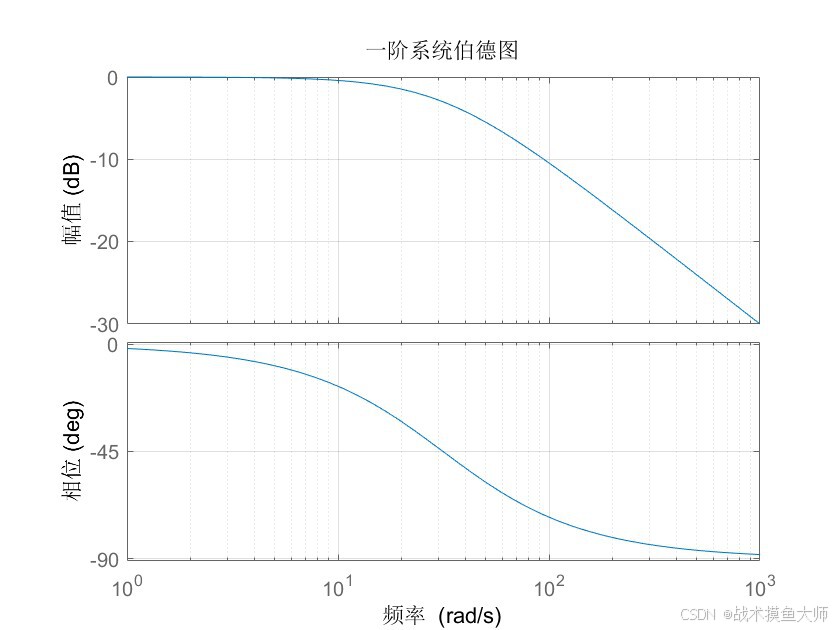
使用matlab画一个一阶系统的伯德图
RC = 0.0318; % 增益
omega0 = 1; % 自然频率,例如1 rad/s% 创建传递函数 H(s) = 1/(RCs + omega0)
sys = tf(1, [RC, omega0]);
bode(sys);
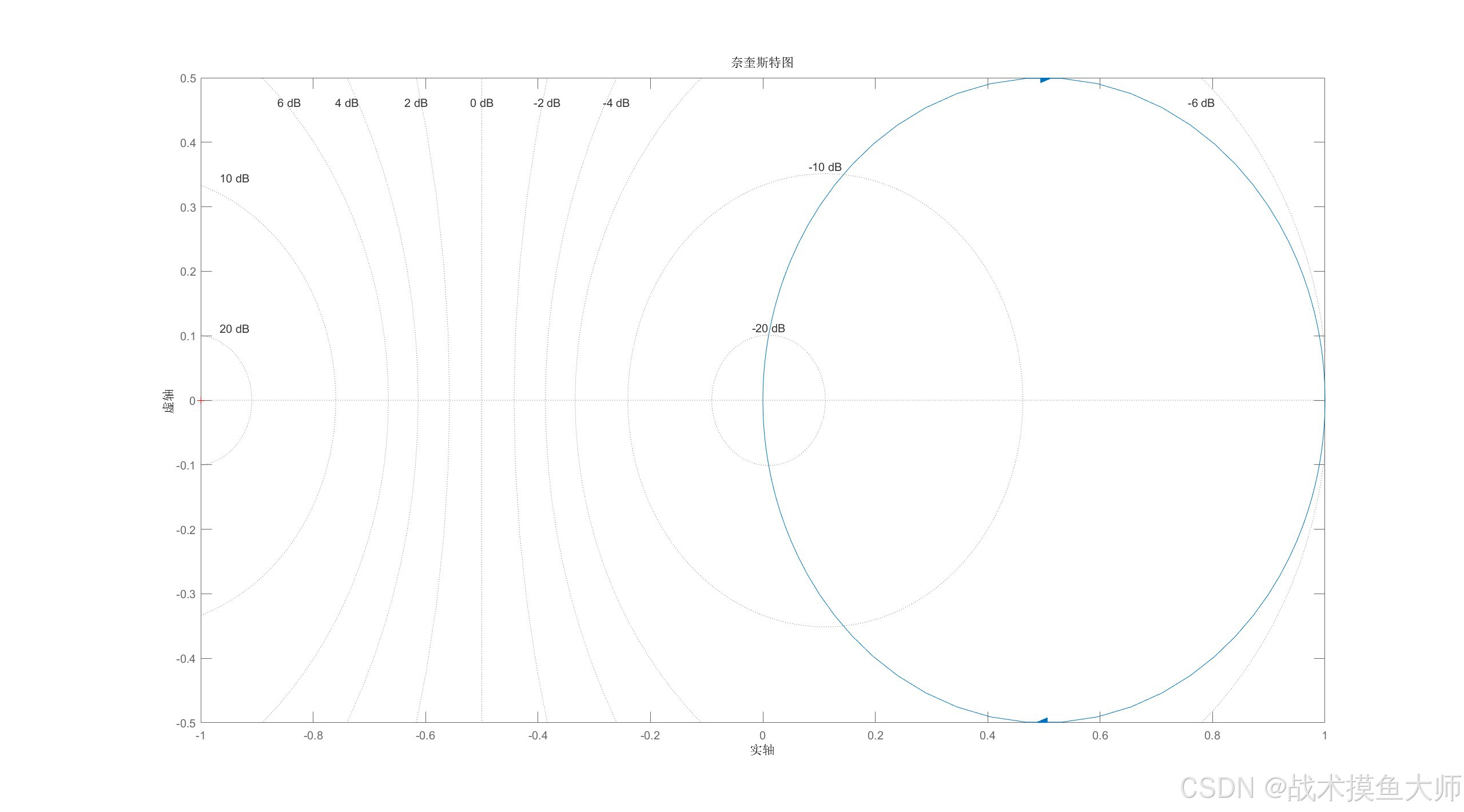
% 奈奎斯特图将这个函数改为nyquist(sys)即可
grid on; % 添加网格线以增强可读性
title('一阶系统伯德图');
奈奎斯特图(Nyquist Plot)
在复平面(G(jω)平面) 上,当频率ω\omegaω从0→∞时,幅频特性和相频特性的轨迹曲线,是判断反馈系统稳定性的核心工具:
- 原理:基于奈奎斯特稳定判据:系统闭环稳定的充要条件是“奈奎斯特曲线绕(-1,j0)点的次数NNN”满足Z=P−NZ = P - NZ=P−N(其中PPP为开环系统右半s平面极点个数,ZZZ为闭环系统右半s平面极点个数;需Z=0Z=0Z=0时系统稳定)。
- 适用场景:
- 分析“非最小相位系统”(存在右半s平面零点的系统),伯德图对此类系统的稳定性判断易出错,奈奎斯特图更可靠。
- 评估系统的“相对稳定性”(增益裕量、相位裕量可通过奈奎斯特图直观读取)。
一阶系统的奈奎斯特图:
尼科尔斯图(Nichols Plot)
将幅频特性和相频特性合并绘制在“幅值-相位”坐标上的图形,纵轴为20lg∣G(jω)∣20\lg|G(j\omega)|20lg∣G(jω)∣(dB),横轴为∠G(jω)\angle G(j\omega)∠G(jω)(°):
- 核心优势:可直接叠加“闭环幅频特性曲线”,快速读取闭环系统的“谐振峰值”(反映振荡程度)、“带宽”(反映响应速度),便于闭环性能设计。
- 适用场景:需同时优化开环稳定性和闭环动态性能的场景(如精密伺服系统设计)。
时域分析
时域分析通过系统对典型输入信号(阶跃、斜坡、脉冲) 的输出响应,直接评估系统的 “动态性能”(如超调量、调节时间)和 “稳态性能”(如稳态误差),核心工具如下:
典型输入信号
是时域分析的“标准测试信号”,用于统一评价不同系统的性能:
- 单位阶跃信号(u(t)u(t)u(t)):输入突然从0变为1并保持,模拟“系统承受恒定扰动或设定值突变”(如电机转速从0突然设定为1000rpm),是最常用的测试信号。
- 单位斜坡信号(r(t)=tr(t) = tr(t)=t):输入随时间线性增长,模拟“系统跟踪缓慢变化的设定值”(如机床进给速度匀速提升)。
- 单位脉冲信号(δ(t)\delta(t)δ(t)):输入瞬间产生一个冲量后消失,用于推导系统的“单位脉冲响应”(时域特性的核心指标)。
核心分析指标
基于“单位阶跃响应”定义,直接反映系统性能:
- 动态性能:超调量(σ%\sigma\%σ%,反映响应的振荡程度)、调节时间(tst_sts,反映响应的快速性)、上升时间(trt_rtr,反映响应的初始速度)。
- 稳态性能:稳态误差(esse_{ss}ess,反映系统跟踪设定值的精度),可通过“稳态误差系数”(位置系数KpK_pKp、速度系数KvK_vKv、加速度系数KaK_aKa)快速计算。
劳斯稳定判据(Routh Criterion)
无需求解特征方程根,仅通过特征多项式系数判断系统稳定性:
- 原理:将特征多项式系数按行排列成“劳斯阵列”,若阵列第一列所有元素均为正,则系统稳定;若存在负元素,负元素的个数等于“右半s平面极点的个数”(极点在右半平面时系统不稳定)。
- 适用场景:快速判断低阶系统(如2阶、3阶)的稳定性,或设计控制器时约束参数范围(如确定PID的比例系数上限)。
根轨迹
根轨迹是当系统中某一参数(如PID的比例系数KpK_pKp)从0→∞变化时,闭环系统极点在s平面上的运动轨迹,核心工具为“根轨迹法”(Root Locus Method),由埃文斯(Evans)提出:
核心原理
基于“开环传递函数极点、零点”与“闭环极点”的关系:闭环特征方程为1+G(s)H(s)=01 + G(s)H(s) = 01+G(s)H(s)=0,即G(s)H(s)=−1G(s)H(s) = -1G(s)H(s)=−1,分解为幅值条件(∣G(s)H(s)∣=1|G(s)H(s)| = 1∣G(s)H(s)∣=1)和相位条件(∠G(s)H(s)=±(2k+1)π\angle G(s)H(s) = \pm(2k+1)\pi∠G(s)H(s)=±(2k+1)π,k=0,1,2...k=0,1,2...k=0,1,2...)。根轨迹需满足相位条件,幅值条件用于确定轨迹上某点对应的参数值。
总结:经典控制理论工具的核心逻辑
所有工具均围绕“LTI系统的稳定性、动态性能、稳态性能”三大核心目标展开,不同工具的适用场景各有侧重:
- 若需快速判断稳定性:优先用劳斯判据(低阶)或奈奎斯特图(高阶/非最小相位系统)。
- 若需设计控制器参数:优先用根轨迹法(明确极点位置)或伯德图(频域性能直观)。
- 若需直观描述系统组成:用方框图或信号流图;若需定量计算响应:用传递函数(频域/根轨迹)或微分方程(时域)。
这些工具共同构成了经典控制理论的“分析与设计体系”,至今仍是工业控制(如PID控制、电机调速、过程控制)的核心技术基础。
经典控制理论案例
以一个简单的一阶系统为例,演示如何使用经典控制理论。
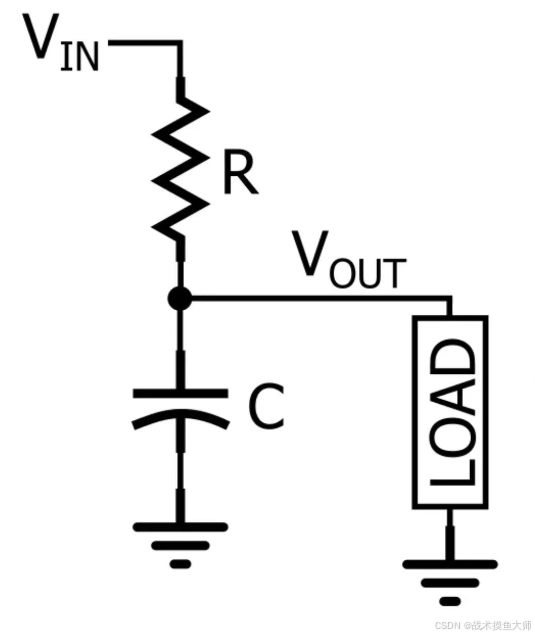
设计一个低通滤波,用于过滤高频信号
滤波的本质是“对不同频率的信号进行选择性衰减”:低通滤波器(LPF) 允许低频信号(包括直流)通过,而抑制高频信号。RC串联电路通过“电容容抗随频率变化”的特性,天然实现了这一功能。
RC串联电路是电子系统中最基础的动态电路之一,其核心特性由时间常数τ=RC\tau = RCτ=RC 和容抗的频率依赖性决定;当以“电容电压为输出”时,它天然成为低通滤波器,通过选择性衰减高频信号实现“保留低频、抑制高频”的功能。
一个添加了反馈电阻以及运算放大器的有源RC滤波电路如下,但是原理没有变化。
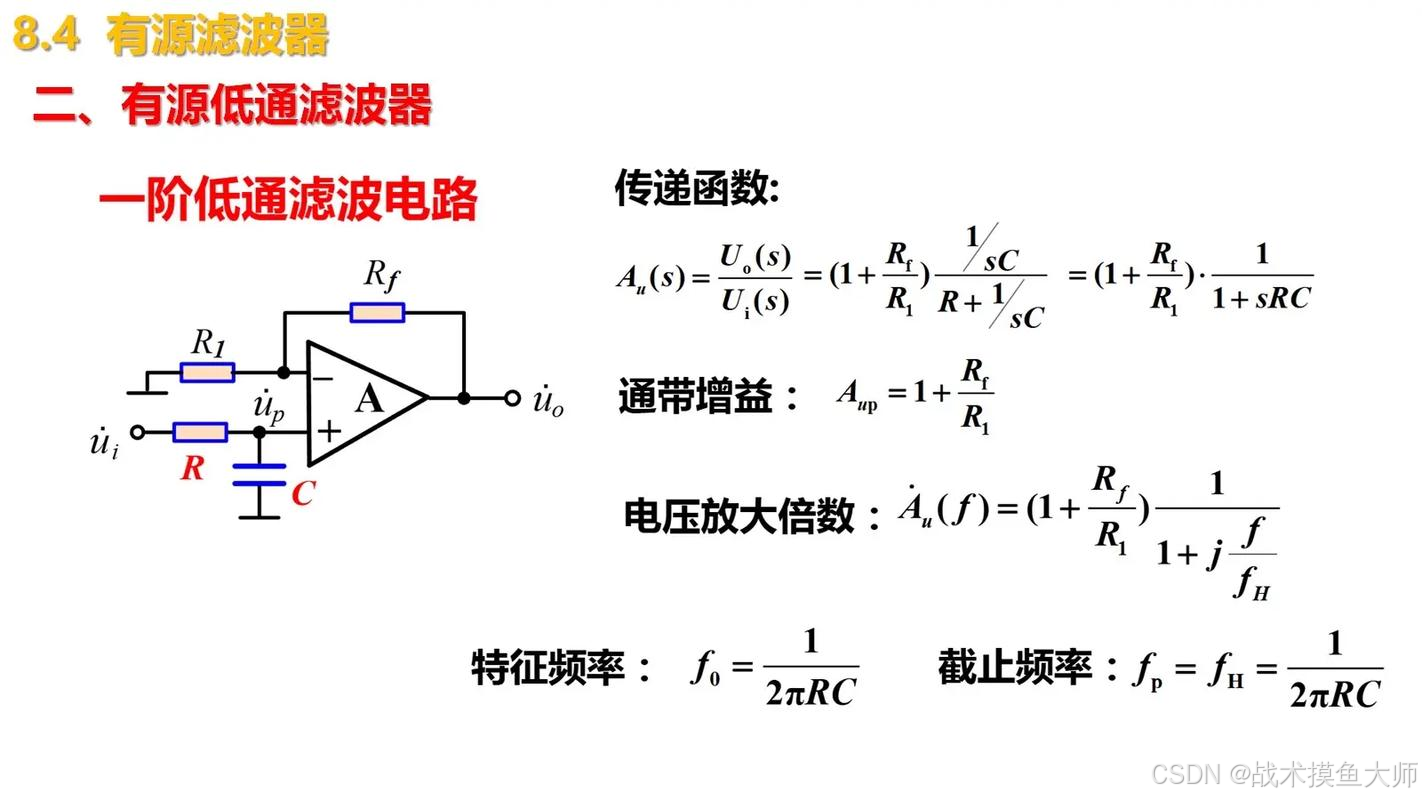
无源滤波器:结构简单,成本低,但存在一些局限性。它的带负载能力差,当后续电路的输入阻抗较低时,会影响滤波效果;而且没有放大能力,信号经过滤波后可能会有衰减,对于需要信号放大的场景不适用。
有源滤波器:由于引入了运算放大器,具备有源器件的优势。运算放大器的高输入阻抗使得它对前级 RC网络的影响很小,带负载能力强;同时通过反馈电阻可以实现信号的放大,能更好地满足对信号幅值和驱动能力的要求,性能更优,适用场景更广泛。
传递函数推导
传递函数G(jω)G(j\omega)G(jω)定义为“输出电压的傅里叶变换与输入电压的傅里叶变换之比”,反映电路对不同角频率ω=2πf\omega = 2\pi fω=2πf 信号的衰减能力。
在交流稳态下,元件的电压电流关系需用“复数阻抗”表示:
- 电阻的复数阻抗:ZR=RZ_R = RZR=R(与频率无关);
- 电容的复数阻抗:ZC=1jωCZ_C = \frac{1}{j\omega C}ZC=jωC1(jjj 为虚数单位,体现相位滞后);
- 串联总阻抗:Z总=ZR+ZC=R+1jωCZ_{总} = Z_R + Z_C = R + \frac{1}{j\omega C}Z总=ZR+ZC=R+jωC1。
根据“分压原理”,输出电压Uo(jω)=UC(jω)=I(jω)⋅ZCU_o(j\omega) = U_C(j\omega) = I(j\omega) \cdot Z_CUo(jω)=UC(jω)=I(jω)⋅ZC,输入电压Ui(jω)=I(jω)⋅Z总U_i(j\omega) = I(j\omega) \cdot Z_{总}Ui(jω)=I(jω)⋅Z总,因此传递函数为:
G(jω)=Uo(jω)Ui(jω)=ZCZR+ZC=1jωCR+1jωCG(j\omega) = \frac{U_o(j\omega)}{U_i(j\omega)} = \frac{Z_C}{Z_R + Z_C} = \frac{\frac{1}{j\omega C}}{R + \frac{1}{j\omega C}}G(jω)=Ui(jω)Uo(jω)=ZR+ZCZC=R+jωC1jωC1
化简后得到:
G(jω)=11+jωRC=11+jωωcG(j\omega) = \frac{1}{1 + j\omega RC} = \frac{1}{1 + j\frac{\omega}{\omega_c}}G(jω)=1+jωRC1=1+jωcω1
其中ωc=1RC\omega_c = \frac{1}{RC}ωc=RC1 称为截止角频率,对应的截止频率(常用单位:Hz)为fc=ωc2π=12πRCf_c = \frac{\omega_c}{2\pi} = \frac{1}{2\pi RC}fc=2πωc=2πRC1——这是低通滤波器的“核心指标”,定义了“通频带”与“阻带”的分界。
幅频特性:信号衰减的量化
传递函数的模(幅值) 表示输出信号相对于输入信号的衰减比例,公式为:
∣G(jω)∣=11+(ωωc)2|G(j\omega)| = \frac{1}{\sqrt{1 + \left( \frac{\omega}{\omega_c} \right)^2}}∣G(jω)∣=1+(ωcω)21
| 频率范围 | 与截止频率的关系 | 幅频特性 | 物理意义(滤波效果) |
|---|---|---|---|
| 低频段(f≪fcf \ll f_cf≪fc) | ωωc≪1\frac{\omega}{\omega_c} \ll 1ωcω≪1 | ≈1\approx 1≈1(衰减0dB) | 信号几乎无衰减,顺利通过(通带) |
| 截止频率点(f=fcf = f_cf=fc) | ωωc=1\frac{\omega}{\omega_c} = 1ωcω=1 | 12≈0.707\frac{1}{\sqrt{2}} \approx 0.70721≈0.707(衰减-3dB) | 信号功率衰减50%,定义通带边界 |
| 高频段(f≫fcf \gg f_cf≫fc) | ωωc≫1\frac{\omega}{\omega_c} \gg 1ωcω≫1 | ≈1ωωc=12πfRC\approx \frac{1}{\frac{\omega}{\omega_c}} = \frac{1}{2\pi f RC}≈ωcω1=2πfRC1(衰减随频率增大) | 信号大幅衰减,被抑制(阻带) |
- 对低频信号(如50Hz市电、音频信号中的低音),电容容抗大,大部分电压降在电容上(输出大);
- 对高频信号(如电磁干扰、射频噪声),电容容抗小,大部分电压降在电阻上(输出小,被过滤)。
相位特性:信号的“时间延迟”
除了幅值衰减,RC低通滤波器还会导致信号相位滞后(输出信号比输入信号“慢”一点),这是电容“电压滞后电流90°”的特性导致的。
传递函数的相位角公式为:
∠G(jω)=−arctan(ωωc)\angle G(j\omega) = -\arctan\left( \frac{\omega}{\omega_c} \right)∠G(jω)=−arctan(ωcω)
- 当f→0f \to 0f→0(直流):相位滞后→0°\to 0°→0°(无延迟);
- 当f=fcf = f_cf=fc(截止频率):相位滞后=−45°= -45°=−45°(固定值);
- 当f→∞f \to \inftyf→∞(高频):相位滞后→−90°\to -90°→−90°(最大延迟)。
相位滞后在实际应用中需注意(如音频系统中可能导致音质失真,控制系统中可能影响稳定性),但对单纯的“噪声过滤”场景(如电源去耦)影响较小。
关键设计参数:如何选择R和C?
RC低通滤波器的核心是确定截止频率fcf_cfc,再根据实际电路约束选择R和C的数值,步骤如下:
-
确定截止频率fcf_cfc:
根据“需要保留的最高频率”确定fcf_cfc(通常取通带最高频率的1.2~1.5倍,避免边缘信号衰减过多)。例如:- 滤除电源高频噪声(需保留直流,抑制100kHz以上噪声):取fc=10kHzf_c = 10kHzfc=10kHz;
- 音频滤波(需保留20Hz~20kHz):取fc=20kHzf_c = 20kHzfc=20kHz。
-
推导R和C的关系:
由fc=12πRCf_c = \frac{1}{2\pi RC}fc=2πRC1,可得RC=12πfcRC = \frac{1}{2\pi f_c}RC=2πfc1。只需确定其中一个参数,即可计算另一个。 -
选择R和C的具体数值:
- 电阻R:通常选择1kΩ~100kΩ(过小会导致电路电流过大,功耗增加;过大则容易引入外界干扰,且输出阻抗高,不适合驱动负载);
- 电容C:根据R的取值计算,优先选择常用容值(如1nF、10nF、100nF、1μF),避免使用特殊容值(成本高、难采购)。
设计实例:例如需设计一个fc=50Hzf_c = 50Hzfc=50Hz 的RC低通滤波器。
- 计算RC=12πfc=3.183msRC=\frac{1}{2\pi f_c}=3.183msRC=2πfc1=3.183ms
- 选择R:电阻 R 的选择需兼顾 “电路阻抗匹配” 和 “信号损耗”,工程上 RC 低通滤波器的 R 通常选择1kΩ1k\Omega1kΩ到100kΩ100k\Omega100kΩ范围,根据RC值,选用1kΩ1k\Omega1kΩ;
- 计算C:C=12πfcR=12×3.14×50×103≈3.183μFC = \frac{1}{2\pi f_c R} = \frac{1}{2 \times 3.14 \times 50 \times 10^3} \approx 3.183\mu FC=2πfcR1=2×3.14×50×1031≈3.183μF,取常用值3.3nF(误差在5%以内,工程上可接受)。
使用matlab的Simulink进行仿真:
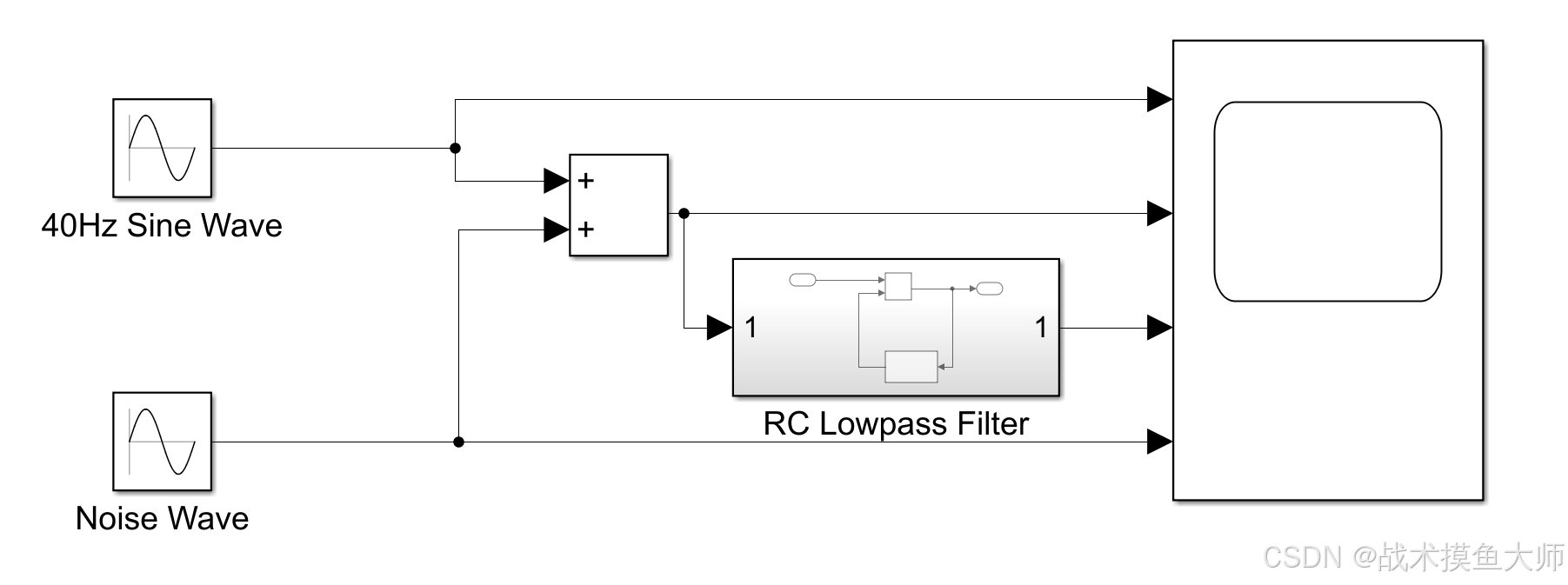
其中的RC滤波根据RC的微分方程实现如下:
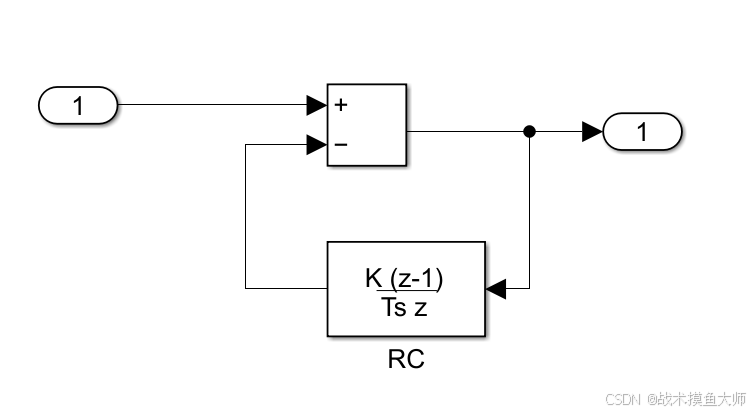
也可以使用simulink中的传递函数模块,结果一样的。
仿真结果如下:
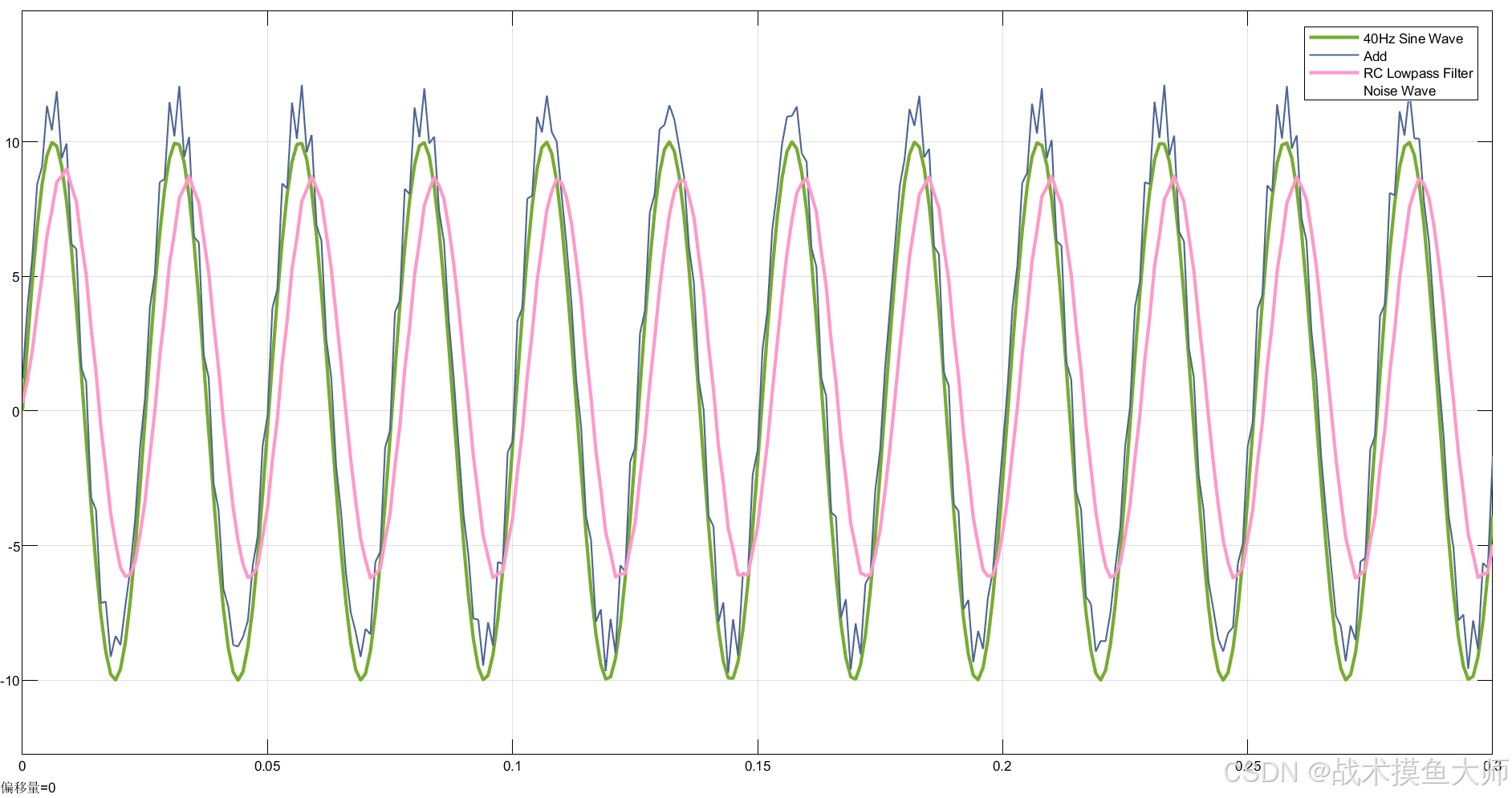
其中绿色为期望信号,粉色为滤波后信号,蓝色为带有噪音的原始信号。
现代控制理论
现代控制理论的工具主要集中在:建模,系统分析,观测,控制,四个方面。
建模
状态空间表达式(核心)
- 核心思想:用“状态变量”(描述系统内部行为的最小变量集,如RC电路的电容电压、电机的转速/转角)完整刻画系统动态,将高阶微分方程转化为一阶线性微分方程组(线性系统)或非线性方程组(非线性系统)。
- 数学形式(连续时间线性时不变系统,LTI):
{x˙(t)=Ax(t)+Bu(t)(状态方程:描述内部动态)y(t)=Cx(t)+Du(t)(输出方程:描述外部观测)\begin{cases} \dot{\mathbf{x}}(t) = \mathbf{A}\mathbf{x}(t) + \mathbf{B}\mathbf{u}(t) \quad \text{(状态方程:描述内部动态)} \\ \mathbf{y}(t) = \mathbf{C}\mathbf{x}(t) + \mathbf{D}\mathbf{u}(t) \quad \text{(输出方程:描述外部观测)} \end{cases} {x˙(t)=Ax(t)+Bu(t)(状态方程:描述内部动态)y(t)=Cx(t)+Du(t)(输出方程:描述外部观测)
其中:- x(t)∈Rn\mathbf{x}(t) \in \mathbb{R}^nx(t)∈Rn:状态向量(nnn 为系统阶数);
- u(t)∈Rp\mathbf{u}(t) \in \mathbb{R}^pu(t)∈Rp:输入向量(ppp 为输入个数);
- y(t)∈Rq\mathbf{y}(t) \in \mathbb{R}^qy(t)∈Rq:输出向量(qqq 为输出个数);
- A(n×n)、B(n×p)、C(q×n)、D(q×p)\mathbf{A}(n \times n)、\mathbf{B}(n \times p)、\mathbf{C}(q \times n)、\mathbf{D}(q \times p)A(n×n)、B(n×p)、C(q×n)、D(q×p):系统矩阵、输入矩阵、输出矩阵、直接传输矩阵。
- 应用场景:所有现代控制工具的“输入”,无论是稳定性分析、能控性判断还是控制器设计,均基于此表达式。例如:直流电机可建模为 n=2n=2n=2 的系统(状态:转速 ω\omegaω、电枢电流 iai_aia)。
传递函数矩阵(多变量系统扩展)
- 核心思想:线性系统在拉普拉斯变换下,输入与输出的“传递关系矩阵”,是经典控制理论“单变量传递函数”的多变量推广。
- 数学形式:对状态空间表达式取拉普拉斯变换(零初始条件),得 G(s)=C(sI−A)−1B+D\mathbf{G}(s) = \mathbf{C}(s\mathbf{I} - \mathbf{A})^{-1}\mathbf{B} + \mathbf{D}G(s)=C(sI−A)−1B+D,其中 G(s)∈Rq×p\mathbf{G}(s) \in \mathbb{R}^{q \times p}G(s)∈Rq×p 是传递函数矩阵,每个元素 Gij(s)G_{ij}(s)Gij(s) 表示第 jjj 个输入对第 iii 个输出的传递关系。
- 作用:连接经典控制与现代控制,方便分析多变量系统的输入输出特性(如耦合性)。
约旦标准型(系统简化工具)
- 核心思想:通过相似变换(x=Tz\mathbf{x} = \mathbf{T}\mathbf{z}x=Tz,T\mathbf{T}T 为可逆变换矩阵),将系统矩阵 A\mathbf{A}A 转化为“约旦标准型”(对角矩阵或含约旦块的矩阵),暴露系统的“模态特性”(每个模态对应一个极点)。
- 作用:简化系统分析(如稳定性、能控能观性)和控制器设计(如极点配置),因为约旦标准型的结构更清晰(对角元素为系统极点)。
系统分析
稳定性分析
稳定性是系统正常工作的首要条件,现代控制理论提供了适用于线性/非线性、定常/时变系统的稳定性判据,核心是李雅普诺夫方法。
线性系统的特征值判据(李雅普诺夫第一方法特例)
- 适用场景:线性时不变(LTI)系统。
- 核心原理:LTI系统的稳定性由系统矩阵 A\mathbf{A}A 的特征值决定:
- 若所有特征值的实部均小于0(即 Re(λi)<0\text{Re}(\lambda_i) < 0Re(λi)<0),系统渐近稳定(最终收敛到平衡态);
- 若存在特征值实部≥0,系统不稳定或临界稳定。
- 优势:直观、计算简单(通过求解 det(sI−A)=0\det(s\mathbf{I} - \mathbf{A}) = 0det(sI−A)=0 得特征值);
- 局限:仅适用于线性系统,无法处理非线性或时变系统。
李雅普诺夫稳定性理论(核心,适用于所有系统)
- 核心思想:类比“物理系统的能量衰减”——若能找到一个“能量函数”(李雅普诺夫函数 V(x)V(\mathbf{x})V(x)),满足:
- V(x)>0V(\mathbf{x}) > 0V(x)>0(正定,能量非负,仅平衡态为0);
- V˙(x)=dVdt<0\dot{V}(\mathbf{x}) = \frac{dV}{dt} < 0V˙(x)=dtdV<0(负定,能量随时间衰减);
则系统在平衡态处渐近稳定。
- 两大方法:
- 李雅普诺夫第一方法(间接法):通过线性化非线性系统,用线性系统的特征值判据分析原非线性系统的局部稳定性(仅适用于平衡态附近);
- 李雅普诺夫第二方法(直接法):无需求解系统微分方程,直接构造 V(x)V(\mathbf{x})V(x) 分析稳定性,适用于线性/非线性、定常/时变系统,且可分析全局稳定性(整个状态空间)。
- 应用场景:非线性系统(如机械臂、化工反应过程)的稳定性分析,是现代控制中非线性控制设计的基础(如反步法设计需构造李雅普诺夫函数)。
输入输出稳定性(鲁棒性初步分析)
- 核心思想:针对“存在扰动或不确定性”的系统,分析输入(如扰动)有界时,输出是否也有界(BIBO稳定:有界输入→有界输出)。
- 关键工具:小增益定理(∥G(s)∥∞<1\| \mathbf{G}(s) \|_\infty < 1∥G(s)∥∞<1,即系统的H∞范数小于1,保证闭环系统BIBO稳定),是鲁棒控制的基础。
能控性与能观性分析
能控性决定“是否能通过输入改变系统状态”,能观性决定“是否能通过输出估计系统状态”,是状态反馈控制器和观测器设计的前提(卡尔曼提出,现代控制理论的里程碑)。
- 能控性:对任意初始状态 x(t0)\mathbf{x}(t_0)x(t0) 和任意目标状态 x(t1)\mathbf{x}(t_1)x(t1),是否存在输入 u(t)\mathbf{u}(t)u(t)(t0≤t≤t1t_0 \leq t \leq t_1t0≤t≤t1),使系统从 x(t0)\mathbf{x}(t_0)x(t0) 转移到 x(t1)\mathbf{x}(t_1)x(t1)(完全能控)。
- 能观性:对任意初始状态 x(t0)\mathbf{x}(t_0)x(t0),是否能通过观测有限时间内的输出 y(t)\mathbf{y}(t)y(t)(t0≤t≤t1t_0 \leq t \leq t_1t0≤t≤t1),唯一确定 x(t0)\mathbf{x}(t_0)x(t0)(完全能观)。
卡尔曼秩判据(最常用的判据)
- 能控性秩判据:LTI系统完全能控的充要条件是“能控性矩阵”的秩等于系统阶数 nnn:
rank(Cc)=n,其中 Cc=[BABA2B…An−1B]\text{rank}(\mathbf{C}_c) = n, \quad \text{其中 } \mathbf{C}_c = \left[ \mathbf{B} \quad \mathbf{A}\mathbf{B} \quad \mathbf{A}^2\mathbf{B} \quad \dots \quad \mathbf{A}^{n-1}\mathbf{B} \right] rank(Cc)=n,其中 Cc=[BABA2B…An−1B] - 能观性秩判据:LTI系统完全能观的充要条件是“能观性矩阵”的秩等于 nnn:
rank(Co)=n,其中 Co=[CTATCT(AT)2CT…(AT)n−1CT]T\text{rank}(\mathbf{C}_o) = n, \quad \text{其中 } \mathbf{C}_o = \left[ \mathbf{C}^T \quad \mathbf{A}^T\mathbf{C}^T \quad (\mathbf{A}^T)^2\mathbf{C}^T \quad \dots \quad (\mathbf{A}^T)^{n-1}\mathbf{C}^T \right]^T rank(Co)=n,其中 Co=[CTATCT(AT)2CT…(AT)n−1CT]T - 示例:RC低通滤波器(n=1n=1n=1,状态为电容电压 xxx),输入 uuu 为电源电压,状态方程 x˙=−1RCx+1RCu\dot{x} = -\frac{1}{RC}x + \frac{1}{RC}ux˙=−RC1x+RC1u(即 A=−1RC\mathbf{A} = -\frac{1}{RC}A=−RC1,B=1RC\mathbf{B} = \frac{1}{RC}B=RC1)。能控性矩阵 Cc=[B]=1RC≠0\mathbf{C}_c = [\mathbf{B}] = \frac{1}{RC} \neq 0Cc=[B]=RC1=0,秩为1(等于 n=1n=1n=1),故完全能控。
结构分解与对偶原理
- 结构分解:将不完全能控/能观的系统,分解为“能控+不能控”“能观+不能观”的子系统(如能控分解、能观分解),仅需对“能控能观子系统”设计控制器,简化设计复杂度。
- 对偶原理:系统 (A,B,C)(\mathbf{A},\mathbf{B},\mathbf{C})(A,B,C) 的能控性等价于其对偶系统 (AT,CT,BT)(\mathbf{A}^T,\mathbf{C}^T,\mathbf{B}^T)(AT,CT,BT) 的能观性,反之亦然。该原理减少了分析量(只需分析能控性,可推导能观性)。
鲁棒性分析
实际系统存在参数摄动(如电阻电容误差)、外部扰动(如噪声),鲁棒性分析工具用于判断系统在这些不确定性下是否仍稳定、性能是否满足要求。
- 核心工具:
- H∞范数分析:用H∞范数(系统对扰动的最大放大倍数)衡量鲁棒性,∥G(s)∥∞\| \mathbf{G}(s) \|_\infty∥G(s)∥∞ 越小,系统抗扰动能力越强;
- 结构奇异值(μ分析):针对“结构化不确定性”(如参数摄动的特定形式),判断闭环系统的鲁棒稳定性,比H∞分析更精准。
观测器
实际系统中,状态往往无法全部直接测量(如电机的电磁转矩难以直接测),观测器的作用是通过“可测量的输出”估计“不可测量的状态”,为状态反馈提供“虚拟状态”。设计需满足“能观”的前提。
观测器建立在能观性的基础上,如果无法观测,那就只有输入输出,跟经典控制理论也没区别了。观测器的博客
全维观测器(Full-Order Observer)
- 核心思想:构造一个与原系统“结构相同”的动态系统(观测器),通过“输出误差”(原系统输出 y\mathbf{y}y 与观测器输出 y^\hat{\mathbf{y}}y^ 的差值)修正观测器的状态 x^\hat{\mathbf{x}}x^,使 x^\hat{\mathbf{x}}x^ 逐步收敛到真实状态 x\mathbf{x}x。
- 观测器方程:
x^˙=Ax^+Bu+L(y−y^)=(A−LC)x^+Bu+Ly\dot{\hat{\mathbf{x}}} = \mathbf{A}\hat{\mathbf{x}} + \mathbf{B}\mathbf{u} + \mathbf{L}(\mathbf{y} - \hat{\mathbf{y}}) = (\mathbf{A} - \mathbf{L}\mathbf{C})\hat{\mathbf{x}} + \mathbf{B}\mathbf{u} + \mathbf{L}\mathbf{y} x^˙=Ax^+Bu+L(y−y^)=(A−LC)x^+Bu+Ly
其中 L\mathbf{L}L 是观测器增益矩阵,x^\hat{\mathbf{x}}x^ 是估计状态,y^=Cx^\hat{\mathbf{y}} = \mathbf{C}\hat{\mathbf{x}}y^=Cx^ 是估计输出。 - 设计关键:通过配置观测器闭环矩阵 A−LC\mathbf{A} - \mathbf{L}\mathbf{C}A−LC 的极点(要求收敛速度比闭环系统快2~5倍,避免观测误差影响控制),确定 L\mathbf{L}L。
(注:由对偶原理,观测器增益 L\mathbf{L}L 的设计等价于“对偶系统的状态反馈增益”设计,可复用极点配置或LQR方法。)
降维观测器(Reduced-Order Observer)
- 核心思想:若系统部分状态可直接测量(如电机的转速可通过编码器测,属于可观测输出),则仅需估计“不可测量的状态”,减少观测器的阶数(从 nnn 阶降至 n−qn-qn−q 阶,qqq 为输出个数),简化硬件实现。
- 典型代表:龙伯格观测器(Luenberger Observer),通过状态分解(将状态分为“可测部分 x1\mathbf{x}_1x1”和“不可测部分 x2\mathbf{x}_2x2”),仅对 x2\mathbf{x}_2x2 设计观测器。
- 优势:降低计算复杂度和硬件成本,适用于嵌入式控制系统(如单片机、FPGA)。
卡尔曼滤波器(Kalman Filter)
可以理解为:卡尔曼观测器针对于不确定系统,龙伯格观测器或者其他观测器都是针对确定系统。至于完全不确定的系统,可以使用粒子滤波来处理,这就是另一方面的事情了。
- 核心思想:针对“存在过程噪声(如系统扰动)和测量噪声(如传感器误差)”的系统,设计最优观测器,使状态估计误差的方差最小(即“最小方差估计”)。
- 适用场景:带噪声的线性系统(连续或离散),如导航系统(GPS+IMU融合)、自动驾驶(激光雷达+摄像头数据融合)、工业过程检测(传感器噪声滤波)。
- 核心步骤(离散卡尔曼滤波器):
- 预测步:根据上一时刻估计状态,预测当前时刻状态和误差协方差;
- 更新步:利用当前时刻测量输出,修正预测状态,更新误差协方差(卡尔曼增益 Kk\mathbf{K}_kKk 决定修正权重)。
- 与普通观测器的区别:普通观测器假设无噪声,仅通过输出误差修正;卡尔曼滤波器量化噪声统计特性(过程噪声协方差 Q\mathbf{Q}Q、测量噪声协方差 R\mathbf{R}R),实现最优估计。
先进控制
针对非线性、时变、多约束、强耦合的复杂系统,现代控制理论衍生出更先进的工具,突破线性系统的限制。
鲁棒控制器设计(H∞控制、滑模控制)
- H∞控制:针对“结构化/非结构化不确定性”,设计控制器使闭环系统的H∞范数小于指定值,保证鲁棒稳定性和鲁棒性能(如扰动抑制),适用于化工过程、机器人等参数易变的系统。
- 滑模控制(SMC):通过设计“变结构控制律”,使系统状态强制收敛到“滑模面”,并沿滑模面稳定到平衡态。对参数摄动和外部扰动有强鲁棒性(不敏感),适用于电机控制、无人机抗干扰控制。
模型预测控制(MPC:Model Predictive Control)
- 核心思想:“滚动优化+反馈校正”——基于预测模型,在每个时刻优化未来有限时域内的控制量(考虑输入/输出约束),仅执行当前时刻的控制量,下一时刻重新优化。
- 优势:能处理多变量、强耦合、有硬约束(如电机电流上限、液位上限)的系统,是工业界应用最广泛的先进控制技术之一;
- 应用场景:化工反应釜温度/压力控制、电力系统调度、自动驾驶路径跟踪。
自适应控制(Adaptive Control)
- 核心思想:针对“参数未知或时变”的系统(如无人机负载变化、电池老化),在线估计未知参数,并实时调整控制器参数,使系统性能保持稳定。
- 典型类型:模型参考自适应控制(MRAC,使系统输出跟踪参考模型输出)、自校正调节器(STR,在线估计系统参数并更新控制器)。
非线性控制工具
- 反馈线性化:通过非线性坐标变换和状态反馈,将非线性系统转化为“线性系统”,再用线性控制方法设计控制器(如机械臂的反馈线性化控制);
- 反步法(Backstepping):逐步构造李雅普诺夫函数和控制律,处理“严反馈型”非线性系统(如永磁同步电机的转速控制),保证全局稳定性。
总结:现代控制工具的逻辑链
现代控制理论的工具体系围绕“建模→分析→设计→优化”形成闭环,核心逻辑如下:
- 用状态空间表达式建立系统模型;
- 用能控能观性分析判断是否可设计控制器/观测器,用李雅普诺夫方法分析稳定性;
- 若状态可测,用极点配置/LQR设计状态反馈控制器;若状态不可测,先设计观测器/卡尔曼滤波器估计状态,再结合控制器构成“输出反馈控制器”;
- 若系统有不确定性、约束或非线性,用H∞控制/MPC/反馈线性化等先进工具优化性能。
前馈控制vs反馈控制
在控制系统中,前馈控制(Feedforward Control) 和 反馈控制(Feedback Control) 是两种核心控制策略,其根本区别在于是否利用“系统输出的偏差”来驱动控制动作——反馈控制依赖“偏差修正”,前馈控制依赖“扰动预判”,二者在控制逻辑、响应速度和适用场景上差异显著,常结合使用以优化控制性能。
| 对比维度 | 反馈控制(Feedback Control) | 前馈控制(Feedforward Control) |
|---|---|---|
| 1. 核心控制依据 | 输出偏差:即“设定值(期望输出) - 实际输出”的差值 只有当输出偏离设定值时,才产生控制动作。 | 可测扰动:即“影响输出的外部干扰”(如负载变化、电压波动) 无需等待输出偏差,直接根据扰动的大小和方向提前补偿。 |
| 2. 控制动作时机 | “滞后响应”:偏差出现后才动作(需经历“输出偏离→检测偏差→计算控制量→执行”的过程)。 | “超前补偿”:扰动刚发生(甚至未影响输出前),就启动控制动作,抵消扰动对输出的影响。 |
| 3. 系统结构 | 闭环结构:必须包含“传感器(检测输出)→比较器(计算偏差)→控制器→执行器→被控对象”的闭环回路,形成“偏差→修正→再检测”的循环。 | 开环结构:无需检测输出,仅包含“扰动传感器→前馈控制器→执行器→被控对象”的开环路径,不形成闭环循环。 |
| 4. 抗扰动能力 | - 对所有影响输出的扰动(无论是否可测)都有修正作用(只要扰动导致输出偏差,就会被闭环检测并修正)。 - 但修正存在滞后,对快速扰动(如电网电压骤降)的抑制效果较差。 | - 仅对提前设定的、可测量的特定扰动有效(若扰动不可测或未纳入前馈模型,无法补偿)。 - 补偿无滞后,对已知快速扰动的抑制效果极佳。 |
| 5. 控制精度与稳定性 | - 精度依赖“偏差检测精度”和“控制器参数设计”,理论上可通过持续修正使偏差趋近于零(如PID控制的无静差特性)。 - 闭环结构可能引入稳定性问题(如参数不当导致系统振荡、超调)。 | - 精度完全依赖“前馈模型的准确性”(需精确计算“扰动→输出变化”的关系,若模型误差大,补偿效果会恶化)。 - 开环结构不影响原系统稳定性(仅叠加补偿量,无闭环振荡风险)。 |
| 6. 典型应用场景 | - 扰动复杂且不确定的场景:如家用空调(室温受开门、日照、人数等多因素影响,无法提前预判所有扰动,依赖反馈修正温差)、工业炉温控制(受燃料压力、环境温度波动影响)。 - 经典应用:PID控制器(所有基于偏差的闭环控制核心)。 | - 扰动可测且影响显著的场景:如精密机床(切削负载变化会导致主轴转速下降,通过前馈补偿负载扭矩,维持转速稳定)、电网稳压电源(提前检测输入电压波动,前馈调整稳压电路,避免输出电压偏移)、传送带速度控制(物料重量变化前馈补偿电机扭矩)。 |
核心差异的深层解读
最根本区别:“偏差驱动” vs “扰动驱动”
这是两者逻辑的本质不同,可通过“水杯倒水”的生活化例子理解:
-
反馈控制:相当于“先倒水,再看水位——如果水位低于目标(偏差),就继续加水;如果高于目标,就倒掉多余的水”。整个过程依赖“水位偏差”的反馈,必然存在“先偏离再修正”的滞后。
工程实例:家用洗衣机的水位控制——先进水,水位传感器检测实际水位,若低于设定值(偏差),继续进水;若达到设定值,停止进水(反馈闭环修正)。 -
前馈控制:相当于“提前计算‘杯子的容积+当前水量’,知道还需要加多少水,一次性加到位,无需等待水位偏差”。整个过程依赖“扰动(当前水量)的预判”,无滞后。
工程实例:汽车巡航控制中的“坡度前馈”——当GPS检测到前方上坡(扰动:坡度会导致车速下降),无需等待车速降低(无偏差时),就提前增加发动机扭矩,抵消坡度对车速的影响,维持巡航速度稳定。
“普适性” vs “针对性”
-
反馈控制的优势是“普适”:无论扰动是“可测”(如电网电压变化)还是“不可测”(如环境风干扰),只要扰动导致输出偏差,闭环就会启动修正。但代价是“滞后”——对于快速变化的扰动(如毫秒级的电压骤降),反馈修正的速度可能跟不上扰动的变化,导致输出短暂偏离设定值(即“动态误差”)。
-
前馈控制的优势是“针对性”:对已知的快速扰动,能做到“扰动发生即补偿”,几乎无动态误差。但代价是“局限性”——若扰动不可测(如突发的机械振动),或前馈模型不准确(如计算“负载→转速变化”的系数偏差),前馈不仅无效,还可能引入额外干扰(如过度补偿导致输出超调)。
由于单独使用前馈或反馈都有局限,实际工程中常采用“前馈+反馈”的复合控制,结合两者优势:
- 前馈:负责抵消“已知的、主要的快速扰动”(如机床的切削负载、电网的电压波动),减少反馈控制的负担,避免输出出现大的动态偏差。
- 反馈:负责修正“前馈未补偿的剩余偏差”和“未预见的未知扰动”(如环境温度变化、模型误差),确保输出最终稳定在设定值,实现高精度控制。
| 控制需求 | 优先选择反馈控制 | 优先选择前馈控制(或复合控制) |
|---|---|---|
| 扰动特点 | 扰动多、不确定、不可测 | 扰动可测、影响大、变化快 |
| 控制目标 | 追求长期稳定精度,可接受轻微动态偏差 | 追求无滞后补偿,抑制快速扰动导致的动态偏差 |
| 系统复杂度 | 被控对象简单,无需复杂模型 | 被控对象特性明确,可建立准确的“扰动-输出”模型 |
简言之:“反馈管精度,前馈管速度” ——不确定扰动靠反馈兜底,已知快速扰动靠前馈预判,二者结合是复杂系统高精度控制的核心方案。
以机床主轴转速控制为例:机床切削时,工件硬度变化、进给速度调整、切削深度改变等都会导致切削负载(扰动)波动,而主轴转速的稳定直接决定加工精度(如螺纹加工的螺距精度、铣削的表面粗糙度)—— 若负载增大,主轴电机扭矩不足会导致转速下降,最终使加工尺寸超差。
实际控制中,常用复合控制方案,用前馈控制 “抵消已知的、快速的负载扰动”,用反馈控制 “修正前馈的残留误差和未知扰动”,二者协同实现 “无滞后、无偏差” 的主轴转速控制。
例子
结合现代控制理论以及PID控制的一个例子:
在机床传动系统(如主轴、进给轴)中,可以通过设计状态观测器(基于系统动力学模型和可测变量)来间接估计负载扭矩;
首先进行机电系统()简化建模:
J⋅ω˙+B⋅ω+TL=TMJ \cdot \dot{\omega} + B \cdot \omega + T_L = T_MJ⋅ω˙+B⋅ω+TL=TM
其中各参数含义如下:
| 参数 | 物理意义 | 可测性 |
|---|---|---|
| JJJ | 系统总转动惯量(电机+减速箱+主轴+工件) | 通常时变/不可直接测量 |
| ω˙\dot{\omega}ω˙ | 角速度加速度(转速的导数) | 不可直接测量(需计算) |
| ω\omegaω | 主轴(或电机)角速度 | 可测(通过编码器获取) |
| BBB | 粘性阻尼系数(传动摩擦、油阻等) | 近似恒定(可辨识) |
| TLT_LTL | 切削负载扭矩(待观测的目标量) | 不可测(无扭矩传感器) |
| TMT_MTM | 电机输出扭矩(可间接计算) | 可测(通过电机电流计算) |
这个建模是非常简化的,实际应用中,大型机床的粘性阻尼系数会随着随电机速度、工作温度、运行时间、润滑油性质的变化而时变,具有非线性特性。
其中的关键可测变量:
- 角速度ω\omegaω:由电机轴或主轴上的编码器(如光电编码器、光栅尺)实时采集,采样频率通常达kHz级,精度足够;
- 电机输出扭矩TMT_MTM:对于直流电机或永磁同步电机(PMSM),TMT_MTM与电枢电流IaI_aIa(等于q轴定子电流)成正比(TM=Kt⋅IaT_M = K_t \cdot I_aTM=Kt⋅Ia,KtK_tKt为电机转矩常数,可查手册或辨识),因此通过电流传感器采集IaI_aIa即可间接得到TMT_MTM。
接着需要根据可测变量设计观测器,观测负载力矩以及转动惯量,进而进行前馈补偿。