基于路测点云标注生成OpenDrive地图的全流程解析
让数据真正闭环的L4级自动驾驶仿真工具链-杭州千岑智能科技有限公司:RSim。
基于路测点云数据生成OpenDrive地图是一项融合点云处理、特征提取和地图格式转换的复杂技术,它通过将高精度传感器采集的三维环境信息转化为自动驾驶系统可理解的标准格式,为车辆提供精确的先验环境信息。随着自动驾驶技术向L3/L4级演进,对高精地图的需求日益增长,而OpenDrive作为ASAM制定的行业标准,已成为自动驾驶仿真测试和路径规划的重要基础。本文将详细解析从点云数据采集到OpenDrive地图生成的完整技术流程,包括数据预处理、特征提取与标注、坐标系转换和格式转换等关键环节。
一、路测点云数据采集与预处理
点云数据采集是整个流程的起点,通常使用高精度激光雷达系统完成。根据2025年最新技术标准,自动驾驶高精地图要求点云数据的采样精度达到毫米级,覆盖范围超过120米,且能够捕捉道路几何特征和基础设施细节。主流激光雷达如Velodyne的VLP-16或禾赛科技的ATX系列,能够提供每秒约130,000个点的高密度点云数据,满足自动驾驶对道路环境的精确感知需求。
数据预处理是确保地图质量的关键环节,主要包括去噪、分割和配准三个步骤。去噪处理旨在消除点云中的异常点和随机噪声,常用方法包括体素滤波、高斯滤波和统计滤波。体素滤波通过将点云分割成规则的三维网格,保留每个网格中的代表性点;高斯滤波则利用邻域点的加权平均来平滑数据;统计滤波根据点到其邻近点的平均距离进行筛选,有效去除明显离群点。2025年最新研究显示,基于深度学习的噪声处理模块(如CAF)相比传统滤波方法,能显著提高模型鲁棒性,允许处理含300个干扰点的点云数据,而传统方法仅能处理约50个干扰点。
点云分割是将点云数据划分为不同类别和区域的过程,如道路、车道线、交通标志和障碍物等。根据分割方法的不同,可分为基于强度的分割和基于深度学习的分割。基于强度的分割利用点云的反射强度特性进行分类,适合区分沥青路面、混凝土和金属结构等;基于深度学习的分割则采用如PointNet++、DGCNN等模型,通过训练学习点云的几何特征和语义信息,实现更精确的分类。2025年的研究表明,通过融合多尺度特征提取网络,分割精度可达到99.68%,为后续标注提供高质量基础数据。
点云配准是将不同时间或不同传感器采集的点云数据对齐到同一坐标系的过程,常用算法包括迭代最近点算法(ICP)和正态分布变换(NDT) 。ICP算法通过计算点云间的最近点对,估计最优刚体变换矩阵进行配准;NDT算法则将点云转换为概率分布,通过最大似然估计实现配准。2025年最新提出的Cross-PCR方法在处理跨源点云配准时,匹配精度提高了94.5%,特别适合处理激光雷达与深度相机采集的点云差异。配准后的点云数据需进行全局坐标系统一,通常采用UTM坐标系或WGS84坐标系,确保地图的全局一致性。
二、点云标注工具与特征提取
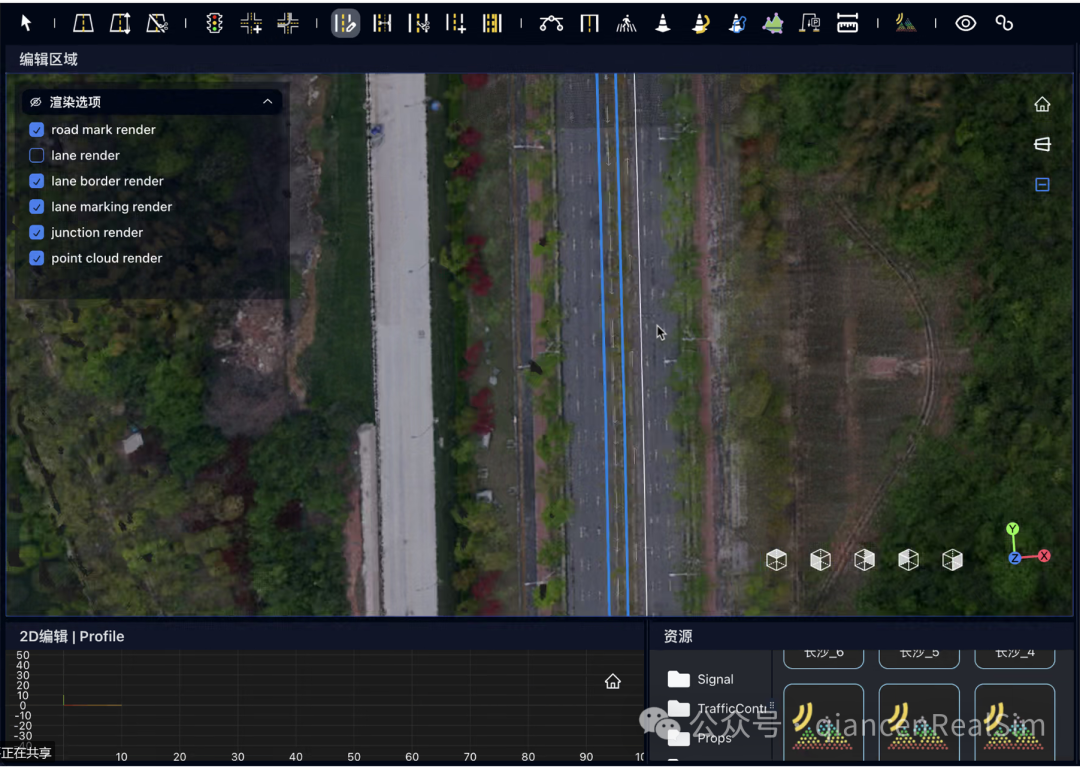
点云标注是将语义信息赋予点云数据的过程,对于生成结构化的OpenDrive地图至关重要。根据标注方式的不同,可分为手动标注、半自动标注和全自动标注。手动标注精度高但效率低,通常用于关键区域或复杂场景;半自动标注结合算法与人工干预,如使用RSim等专业工具;全自动标注则依赖深度学习模型进行特征提取和分类。
目前市场上主流的点云标注工具包括RSim、AutoCore MapToolBox和LATTE等。RSim是杭州千岑开发的专业工具,支持激光雷达点云、航拍图像和GIS数据的可视化,可直接导出OpenDRIVE格式的地图 。根据2025年最新资料,RSim已支持OpenDRIVE 1.6格式,并可通过其OpenScenario编辑实现交互式场景。AutoCore MapToolBox是Autoware生态中的开源标注工具,支持点云标注和矢量地图生成,但OpenDRIVE支持尚在开发中。LATTE则是专为激光雷达点云设计的开源标注工具,通过传感器融合、一键标注和跟踪技术,可将标注效率提升6.2倍,但需额外开发OpenDRIVE导出功能 。

特征提取是将点云数据中的关键道路元素识别出来的过程,主要包括道路标记、车道线、交通标志和杆状目标等。对于道路标记和车道线,通常采用边缘检测和曲线拟合方法,如通过高斯滤波和边缘检测算法识别车道线边缘,再使用三次样条曲线或参数化三次多项式进行拟合。对于交通标志和杆状目标,则采用基于深度学习的目标检测算法,如PointNet++或DGCNN,通过训练模型识别这些物体的位置和类型。

2025年的研究显示,结合多传感器数据的特征提取方法能显著提高标注精度。例如,通过融合激光雷达点云和相机图像,可利用视觉信息补充点云的稀疏区域,提高车道线和交通标志的识别率。此外,基于生成对抗网络(GAN)的方法也被应用于道路边界补全,有效填补了点云数据中的遮挡空白。
三、坐标系转换与OpenDRIVE格式生成
坐标系转换是确保地图精度的重要环节,将点云数据从采集坐标系转换到OpenDRIVE标准坐标系。OpenDRIVE定义了三种坐标系:惯性x/y/z坐标系(ISO 8855标准)、参考线s/t/h坐标系和局部u/v/z坐标系。惯性坐标系描述点云在世界空间的绝对位置;参考线坐标系以道路中心线为基准,s轴沿道路切线方向,t轴与s轴正交;局部坐标系则以车辆为基准,便于自动驾驶算法处理。
坐标转换通常采用六参数或七参数模型,具体公式为:
x = x₀ + △x cosφ cosω - △y sinφ + △z cosφ sinω
y = x₀ sinθ cosφ + △y cosθ + △z sinθ cosφ
z = x₀ sinω cosφ + △y sinφ sinω + △z cosω
其中,x₀、y₀、z₀为参考线坐标系原点在惯性坐标系中的坐标,△x、△y、△z为平移参数,φ、ω、θ为旋转参数 。2025年的研究指出,对于大范围地图,应采用七参数模型进行转换;而对于小范围区域(不超过30平方公里),四参数模型即可满足要求。
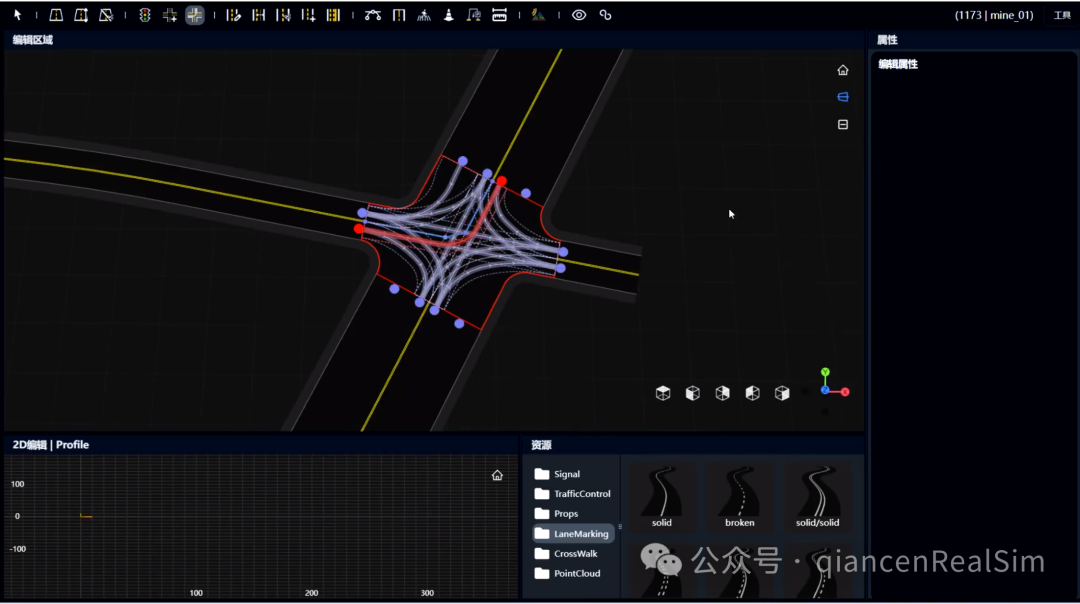
OpenDRIVE格式生成是将处理后的点云数据转换为符合ASAM标准的XML文件的过程。OpenDRIVE文件的核心结构包括header、road、junction和object等元素。header包含地图版本和地理参考信息;road元素描述道路几何形状和车道信息;junction元素定义道路交叉口;object元素则表示道路沿线的设施和障碍物。
生成OpenDRIVE地图的主要方法有两种:基于专业工具链和基于编程实现。基于专业工具链的方法如使用RSim或RealSim,这些工具支持从点云数据直接生成OpenDRIVE地图。基于编程实现的方法则需要手动构建XML结构,通常使用Python的xml dom或xmltodict库处理。根据2025年的研究,使用Python脚本生成OpenDRIVE地图时,需遵循以下步骤:
1. 根据点云数据拟合道路参考线,计算其几何参数(如长度、曲率、方向角)
2. 将参考线转换为OpenDRIVE支持的几何形状(直线、螺旋线、圆弧或参数化三次多项式)
3. 根据标注数据定义车道信息,包括车道宽度、类型、限速等属性
4. 添加交通标志、信号灯等基础设施信息
5. 构建道路拓扑关系,定义道路间的连接和交叉口

对于道路参考线的参数化表示,OpenDRIVE推荐使用参数化的三次多项式曲线:
u(p) = aU + bU p + cU p² + dU p³
v(p) = aV + bV p + cV p² + dV p³
其中,p为插值参数(通常在[0,1]范围内),aU、bU、cU、dU和aV、bV、cV、dV为多项式系数 。对于直路部分,aU和aV通常设置为0,bU和bV分别设置为道路长度和宽度;对于弯道部分,则需根据曲率变化调整系数值 。
四、地图精度验证与更新机制
生成的OpenDRIVE地图需要经过严格的精度验证,确保其满足自动驾驶系统的要求。精度验证主要分为静态精度验证和动态精度验证。静态精度验证评估地图的几何精度,包括车道线位置、道路曲率和坡度等;动态精度验证则评估地图在车辆运动过程中的表现,如定位精度和路径规划效果。
2025年的研究表明,基于重采样点的配准方法是验证OpenDRIVE地图精度的有效手段。具体流程为:首先提取待评估曲线要素的地面真值点与图上参考点,分别拟合经过所有点的曲线,然后使用ICP算法计算转换参数和变换后的点集,最后通过计算平均距离或最大允许误差来评估精度 。实验数据显示,对于车道线航向精度,95%准确度对应的置信区间为[1.96σ,1.96σ],而99.9999999%准确度对应的置信区间为[6.11σ,6.11σ],约为前者的3.12倍。
高精地图的更新机制是保证地图时效性的关键。随着道路环境的不断变化,地图需要及时更新以反映实际路况。2025年的主流更新方案包括专业测绘更新和众包更新两种方式 。
专业测绘更新由具备甲级资质的测绘公司完成,使用高精度传感器(如厘米级RTK定位)进行数据采集和处理,但更新周期长(通常为月级),成本高。根据2025年智驾地图市场研究报告,全国公路总里程超过500万公里,仅采集高速公路及主要城市公路数据,也有上百万公里,而即使最壕的图商,手中的地图采集车队也才百辆规模,甚至不足以支持地图月更。
众包更新则是通过接入量产车的传感器数据,实现地图的自动化更新。2025年的研究显示,随着激光雷达技术的进步和算力提升,众包更新已成为主流方案。例如,百度、腾讯等企业通过车载传感器实时回传数据,实现地图要素的自动化更新,制图周期从传统的"月级"缩短至"分钟级"。激光雷达众包地图更新的关键技术包括数据清洗、坐标对齐和动态要素处理等。
对于增量更新,2025年的研究提出了一种基于激光雷达运动估计的方法。该方法通过NDT算法进行点云粗配准,再通过ICP算法进行精配准,最终将点云信息不断更新并叠加,形成最终的点云地图 。实验数据显示,该方法在复杂场景下定位误差降低40%,全局点云配准精度达0.12米,满足L4级自动驾驶需求。
五、OpenDRIVE地图的动态要素处理
OpenDRIVE标准主要用于描述道路的静态几何信息,如道路形状、车道线和交通标志的位置等。然而,自动驾驶系统也需要了解道路的动态变化,如交通信号状态、临时施工和事故等。根据2025年的研究,OpenDRIVE的动态要素处理主要通过以下两种方式实现:
1. 与OpenSCENARIO结合:OpenSCENARIO是ASAM定义的动态场景描述标准,用于定义自动驾驶测试中的动态元素和行为。通过将OpenDRIVE的静态道路信息与OpenSCENARIO的动态行为描述结合,可以构建完整的测试场景。例如,定义交通信号灯的相位变化、行人和车辆的运动轨迹等。

2. 与动态图层集成:在实际应用中,OpenDRIVE地图通常与动态图层集成,如百度Apollo的动态图层。动态图层存储实时交通信息,如车辆速度、位置、交通信号灯状态等。通过将OpenDRIVE的静态数据与动态图层的实时数据结合,自动驾驶系统可以获取完整的道路环境信息。

2025年的研究指出,OpenDRIVE的动态要素处理面临两大挑战:一是动态要素的表示方法与静态要素的兼容性;二是动态要素的实时更新与地图的版本管理。针对这些问题,研究者提出了基于事件驱动的更新机制,通过定义特定事件(如交通信号变化、道路施工)触发地图更新,确保动态信息的及时性。
此外,2025年的激光雷达技术发展也为动态要素处理提供了新可能。速腾聚创的EMX和EM4系列激光雷达支持高线数(最高2160线)和高分辨率扫描,能够捕捉更丰富的道路动态信息;禾赛科技的"千厘眼"感知方案则通过多传感器融合,提高动态要素的识别精度。这些技术进步将推动OpenDRIVE地图从静态描述向动态描述的演进。
七、总结
基于路测点云生成OpenDrive地图是一项技术密集型工作,需要综合运用点云处理、特征提取和地图格式转换等技术。随着自动驾驶技术的发展,高精地图的生成和更新机制也在不断创新,从传统的专业测绘向众包模式转变,从静态描述向动态描述演进。
对于实际应用,建议采取以下策略:
1. 选择合适的工具链:根据项目需求和预算选择合适的点云处理和标注工具。对于小型项目或研究用途,可考虑开源工具如AutoCore MapToolBox或LATTE;对于商业应用,RSim或RealSim等专业工具可能更合适。
2. 优化预处理流程:针对激光雷达点云的特点,设计高效的预处理流程,包括去噪、分割和配准等步骤,确保数据质量。
3. 结合多传感器数据:利用相机、雷达等多传感器数据补充激光雷达的不足,提高特征提取的准确率。
4. 建立完善的验证机制:通过仿真测试和实际道路测试验证地图精度,确保其满足自动驾驶系统的要求。
5. 设计灵活的更新策略:根据道路变化频率和重要性,设计差异化的更新策略,平衡精度与成本。
未来,随着激光雷达技术的进步和AI算法的发展,基于路测点云生成OpenDrive地图的效率和精度将进一步提高。同时,开源生态的完善将降低技术门槛,推动高精地图的普及和应用。在自动驾驶向L3/L4级演进的过程中,高精地图作为"先验知识库"的重要性将更加凸显,为车辆提供更精确的环境感知和决策支持。
