无人机中的坐标系理解:机体坐标系,东北天(NED)坐标系,世界大地(WGS84)坐标系
最近项目中频繁运用到不同的坐标系转换,感觉这一块可以单独记录一下,以加深理解。
首先说明一下这三者的概念。
1、机体坐标系(Body Frame)
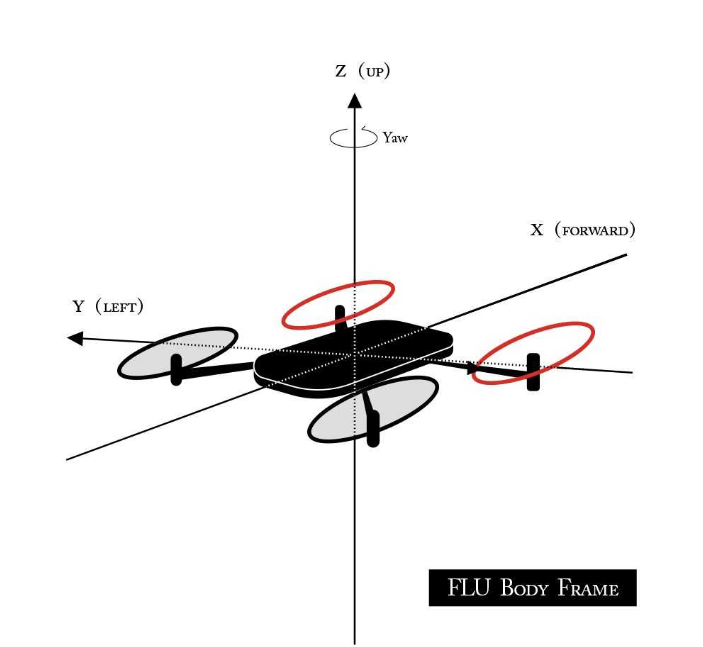
机体坐标系示意图
机体坐标系是绑定在无人机机身上的随动坐标系—— 无人机的位置、姿态变化时,坐标系会跟着无人机一起移动、旋转,始终以无人机的 “重心” 为原点,轴的指向严格跟随机身方向。
简单说:机体坐标系是无人机 “自己的坐标系”,描述 “我向前飞、向左飞” 这类 “相对于自身的运动”。
2、东北天(NED)坐标系
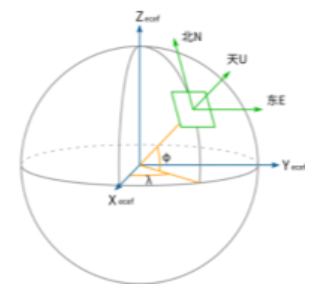
东北天坐标系示意图
ENU 坐标系是固定在地面的静态坐标系—— 原点通常为无人机的起飞点(Home 点),轴的指向严格对应地理方向(东、北、天),不随无人机的运动而变化。
简单说:ENU 坐标系是 “地面的坐标系”,描述 “无人机在起飞点东边 5 米、北边 3 米” 这类 “相对于地理空间的绝对位置”。
3、世界大地(WGS84)坐标系
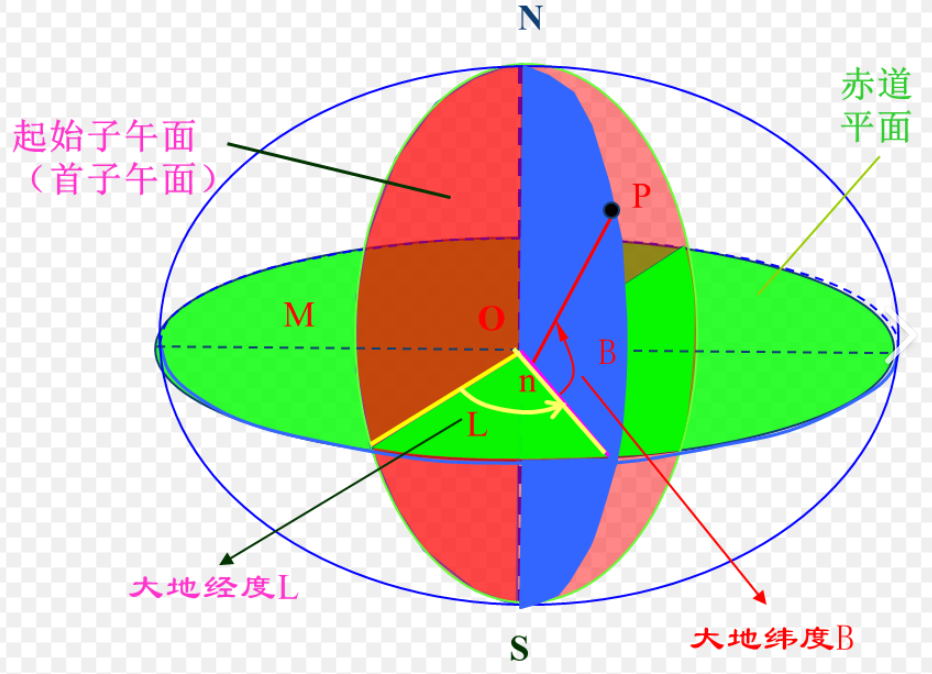
WGS84 的全称是 World Geodetic System 1984(1984 年世界大地坐标系),是目前全球通用的 “地球坐标系”,由美国国防部制定,广泛用于 GPS、北斗等卫星导航系统(GNSS)。
WGS84 是一种大地坐标系,基于 “地球是一个不规则椭球体” 的模型,用 3 个参数描述任意一点在地球表面的绝对位置。这三个参数分别为:经度、纬度、高度。
4、这三者坐标系在无人机系统中的作用
无人机从 RTK/GPS 获取位置到最终实现姿态控制,核心就是 “WGS84 坐标→ENU 坐标→机体坐标系”的两次关键转换 ,这是飞控系统实现 “全球定位” 到 “局部运动控制” 的标准流程。
①RTK 和 GPS 的核心输出是WGS84 坐标系下的经纬度 + 高度(如:北纬 39.9°、东经 116.4°、高度 50 米),这一步是无人机定位的 “数据源”。
②飞控会自动将 WGS84 坐标转换为ENU 东北天坐标,这一步是 “连接全球定位与局部控制” 的关键,核心是 “确定无人机相对于起飞点的位置”。
③ENU 坐标描述的是 “无人机要去的地理位置”,但无人机的电机、姿态控制只能识别 “相对于自身的运动方向”(如 “向前飞、向左滚转”),因此需要第二次转换 —— 将ENU 坐标系下的 “目标运动” 转换为机体坐标系下的 “控制指令”。
加深理解:
机体坐标系核心用途:姿态控制、动力分配、原始传感器数据。
东北天坐标系核心用途:位置定位、路径规划、定点悬停(position)/返航(rtl)。
世界大地坐标系:唯一位置坐标获取,导航。