【完整源码+数据集+部署教程】无人机航拍视角洪水检测与受灾房屋识别图像分割救援指导系统源码和数据集:改进yolo11-DCNV2
背景意义
研究背景与意义
随着全球气候变化的加剧,极端天气事件的频率和强度不断上升,洪水作为一种常见的自然灾害,给人类社会带来了严重的威胁。洪水不仅导致人员伤亡和财产损失,还对基础设施和生态环境造成了深远的影响。因此,及时、准确地检测洪水及其对房屋的影响,成为了灾后救援和恢复工作中的一项重要任务。传统的洪水监测方法往往依赖于地面观测和人工巡查,效率低下且难以覆盖广泛的区域。随着无人机技术的发展,利用无人机进行航拍已成为一种新兴的监测手段,其高效、灵活的特点使其在灾害监测中展现出巨大的潜力。
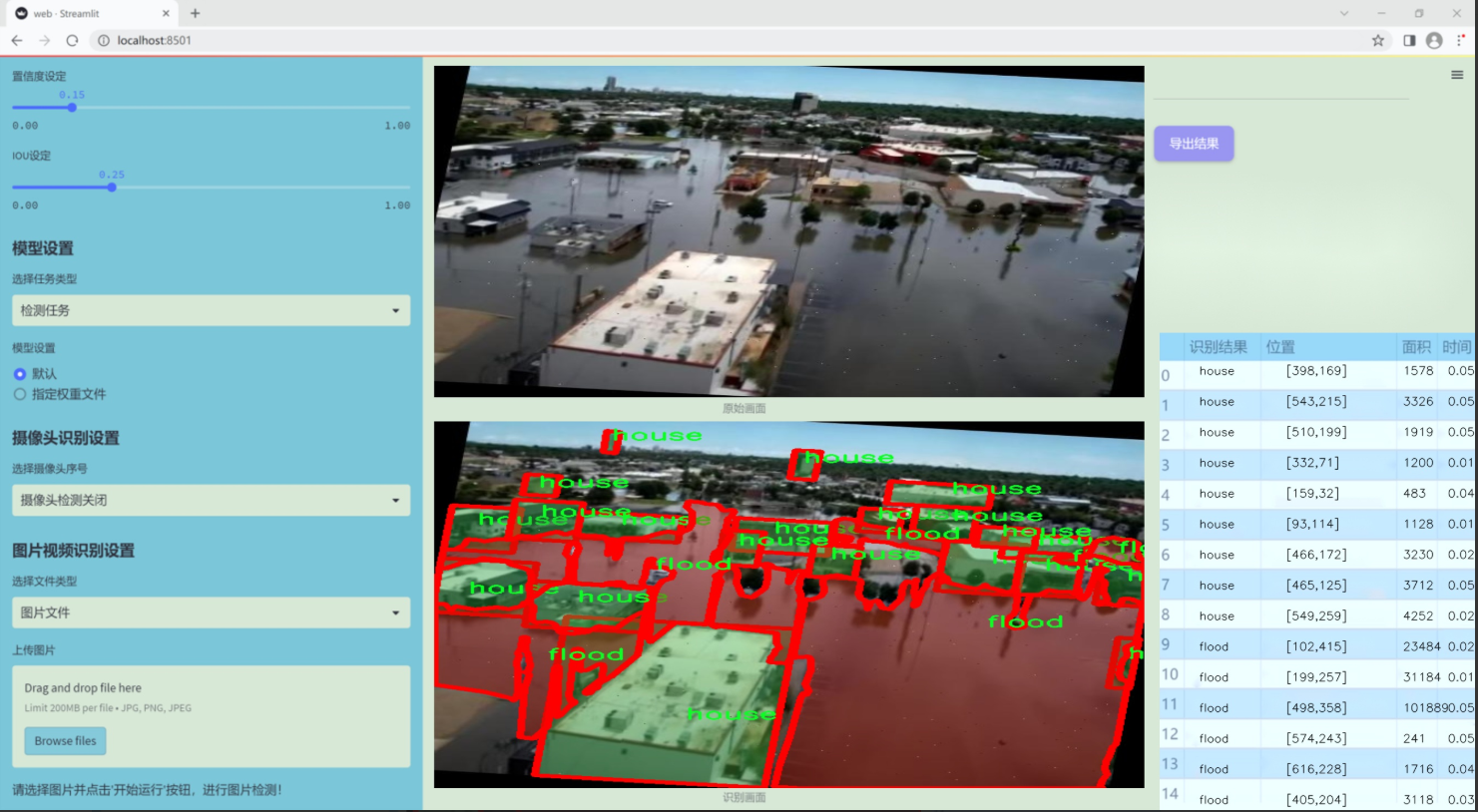
本研究旨在基于改进的YOLOv11模型,构建一个无人机航拍视角下的洪水检测与受灾房屋识别图像分割救援指导系统。该系统将利用1200幅经过精确标注的图像数据集,涵盖洪水和房屋两个类别,通过实例分割技术实现对洪水区域和受灾房屋的精确识别。这一系统的建立,不仅能够提高洪水监测的自动化程度,还能为救援人员提供实时、准确的决策支持,显著提升救援效率。
此外,研究还将探讨图像预处理和数据增强技术在模型训练中的应用,旨在提升模型的鲁棒性和准确性。通过对图像进行随机旋转、模糊处理和噪声添加等多种增强手段,期望在复杂环境下依然能够保持良好的检测性能。综上所述,本研究不仅具有重要的理论意义,还将为实际的洪水应急管理提供有效的技术支持,推动智能监测技术在自然灾害管理中的应用与发展。
图片效果


数据集信息
本项目数据集信息介绍
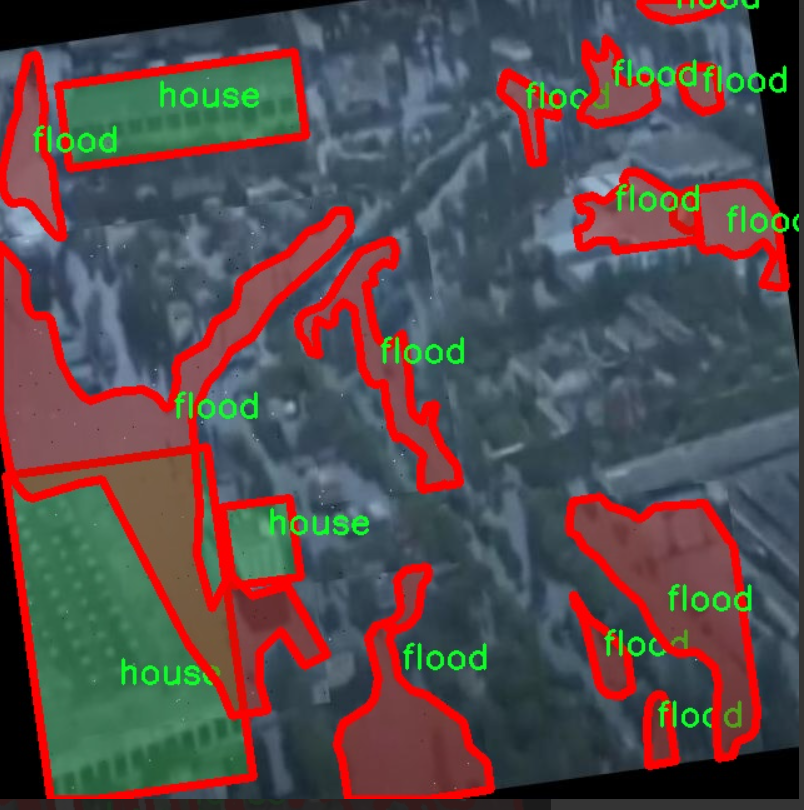
本项目所使用的数据集专注于洪水检测与受灾房屋识别,旨在为改进YOLOv11的无人机航拍视角图像分割救援指导系统提供坚实的数据基础。数据集的主题围绕“洪水检测”展开,包含了两大主要类别:洪水(flood)和房屋(house)。这两个类别的选择不仅反映了洪水灾害的严重性,也突显了在灾后救援中对受灾房屋进行快速识别的重要性。
在数据集的构建过程中,我们收集了大量的航拍图像,这些图像来自于不同的地理区域和气候条件,以确保数据的多样性和代表性。每一幅图像都经过精细的标注,明确区分出洪水区域和房屋的轮廓。这种细致的标注为后续的模型训练提供了高质量的监督信号,使得YOLOv11能够在复杂的环境中有效地进行目标检测与分割。
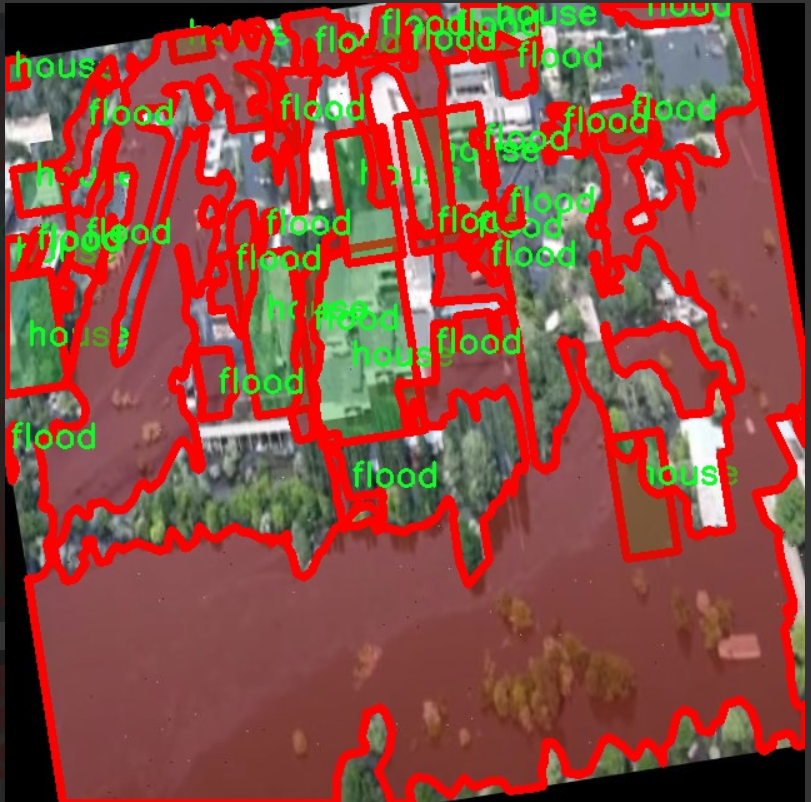
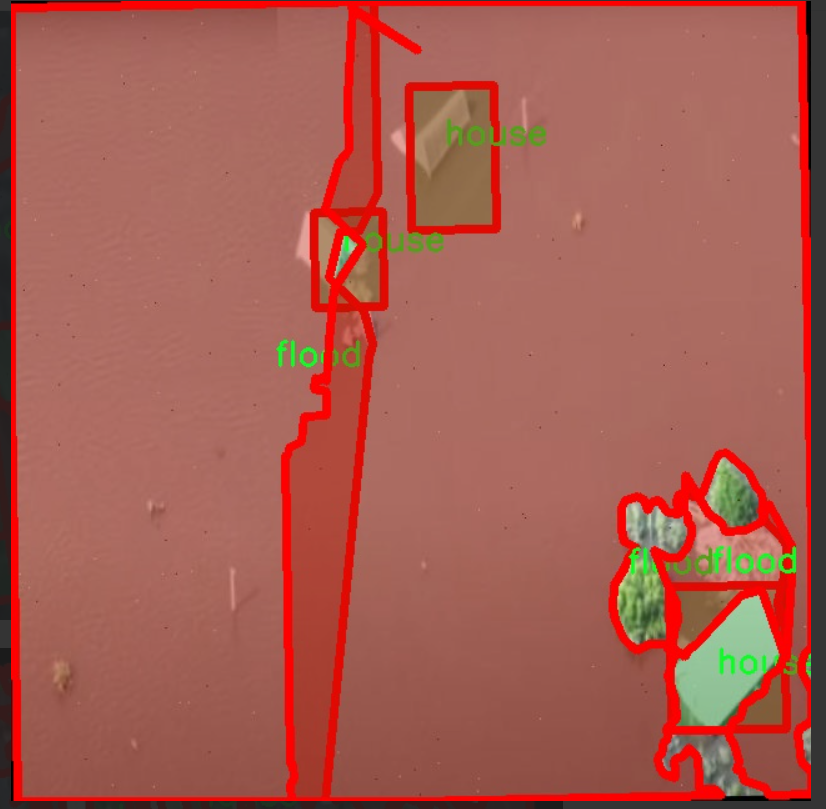
此外,数据集中包含的图像涵盖了多种场景,例如城市、乡村和沿海地区,旨在模拟不同类型的洪水情况。这种多样性不仅提高了模型的泛化能力,也为应对实际灾害提供了更多的参考依据。通过使用该数据集,我们希望能够训练出一个在实际应用中表现优异的模型,能够实时识别洪水和受灾房屋,从而为救援工作提供及时的支持。
总之,本项目的数据集不仅在数量上满足了训练需求,更在质量和多样性上进行了精心设计,力求为无人机航拍视角下的洪水检测与受灾房屋识别提供强有力的技术支持,助力于提升灾后救援的效率和准确性。


核心代码
以下是提取出的核心代码部分,并附上详细的中文注释:
import torch
import torch.nn as nn
import torch.nn.functional as F
class FreqFusion(nn.Module):
def init(self, channels, scale_factor=1, lowpass_kernel=5, highpass_kernel=3, **kwargs):
super().init()
hr_channels, lr_channels = channels
self.scale_factor = scale_factor
self.lowpass_kernel = lowpass_kernel
self.highpass_kernel = highpass_kernel
# 压缩高分辨率和低分辨率特征通道self.compressed_channels = (hr_channels + lr_channels) // 8self.hr_channel_compressor = nn.Conv2d(hr_channels, self.compressed_channels, 1)self.lr_channel_compressor = nn.Conv2d(lr_channels, self.compressed_channels, 1)# 低通滤波器生成器self.content_encoder = nn.Conv2d(self.compressed_channels,lowpass_kernel ** 2 * self.scale_factor * self.scale_factor,kernel_size=3,padding=1)# 高通滤波器生成器self.content_encoder2 = nn.Conv2d(self.compressed_channels,highpass_kernel ** 2 * self.scale_factor * self.scale_factor,kernel_size=3,padding=1)def kernel_normalizer(self, mask, kernel):"""对生成的mask进行归一化处理,使其和为1。"""mask = mask.view(mask.size(0), -1, kernel, kernel)mask = mask / mask.sum(dim=(-1, -2), keepdims=True) # 归一化return maskdef forward(self, x):"""前向传播函数,接收高分辨率和低分辨率特征并进行融合。"""hr_feat, lr_feat = x# 压缩特征compressed_hr_feat = self.hr_channel_compressor(hr_feat)compressed_lr_feat = self.lr_channel_compressor(lr_feat)# 生成低通和高通滤波器的maskmask_lr = self.content_encoder(compressed_hr_feat) + self.content_encoder(compressed_lr_feat)mask_hr = self.content_encoder2(compressed_hr_feat) + self.content_encoder2(compressed_lr_feat)# 对mask进行归一化mask_lr = self.kernel_normalizer(mask_lr, self.lowpass_kernel)mask_hr = self.kernel_normalizer(mask_hr, self.highpass_kernel)# 使用mask对低分辨率特征进行上采样lr_feat = F.interpolate(lr_feat, scale_factor=self.scale_factor, mode='bilinear', align_corners=False)lr_feat = F.conv2d(lr_feat, mask_lr) # 应用低通滤波器# 使用mask对高分辨率特征进行处理hr_feat = hr_feat - F.conv2d(hr_feat, mask_hr) # 应用高通滤波器hr_feat = hr_feat + hr_feat # 残差连接return hr_feat + lr_feat # 返回融合后的特征
代码注释说明:
导入必要的库:导入PyTorch及其相关模块以便构建神经网络。
FreqFusion类:这是一个继承自nn.Module的类,用于实现频率感知特征融合。
初始化方法:
接收高分辨率和低分辨率通道数,以及低通和高通滤波器的核大小。
创建用于压缩高分辨率和低分辨率特征的卷积层。
创建低通和高通滤波器生成器。
kernel_normalizer方法:对生成的mask进行归一化处理,使其在空间上和为1,以便在后续处理中使用。
forward方法:
接收高分辨率和低分辨率特征,进行特征压缩。
生成低通和高通滤波器的mask。
对mask进行归一化处理。
使用mask对低分辨率特征进行上采样和滤波。
使用mask对高分辨率特征进行高通滤波,并进行残差连接。
返回融合后的特征。
通过以上注释,可以更清晰地理解代码的功能和实现细节。
这个程序文件 FreqFusion.py 实现了一种频率感知特征融合的方法,主要用于密集图像预测任务。程序使用了 PyTorch 框架,包含了多个模块和函数,下面是对代码的详细说明。
首先,程序导入了必要的库,包括 PyTorch 的核心库和一些用于卷积操作的函数。接着,定义了一些初始化函数,例如 normal_init 和 constant_init,用于对神经网络中的卷积层进行权重和偏置的初始化。
resize 函数用于调整输入张量的大小,支持多种插值模式,并在某些情况下给出警告,以确保输出的对齐方式符合预期。hamming2D 函数生成二维 Hamming 窗,主要用于后续的卷积操作中,以提高特征融合的效果。
接下来,定义了 FreqFusion 类,这是该程序的核心部分。该类继承自 nn.Module,并在初始化时接收多个参数,包括通道数、缩放因子、低通和高通卷积核的大小等。类中定义了多个卷积层,用于特征的压缩和编码,并根据是否使用高通和低通滤波器来选择不同的卷积结构。
在 init_weights 方法中,对卷积层的权重进行初始化,确保模型在训练开始时具有良好的性能。kernel_normalizer 方法用于对卷积核进行归一化处理,以便在后续的特征融合中使用。
forward 方法是模型的前向传播函数,接收高分辨率和低分辨率的特征图,经过一系列的卷积和融合操作后输出融合后的特征图。如果启用了检查点功能,可以减少内存使用。
在 _forward 方法中,首先对输入的高分辨率和低分辨率特征进行压缩,然后根据是否使用半卷积(semi_conv)来选择不同的处理路径。通过高通和低通卷积层生成掩码,并使用 carafe 操作进行特征的上采样和融合。最终返回融合后的高分辨率特征图。
此外,程序还定义了 LocalSimGuidedSampler 类,用于生成偏移量,帮助在特征融合过程中进行更精细的特征重采样。该类中包含了计算相似度的功能,通过卷积操作和余弦相似度计算来生成偏移量。
最后,compute_similarity 函数用于计算输入张量中每个点与其周围点的余弦相似度,以帮助实现特征的精细重采样。
总体而言,这个程序实现了一种复杂的特征融合机制,结合了高通和低通滤波器的特性,能够有效地提升图像预测的精度和质量。
10.4 kaln_conv.py
以下是保留的核心代码部分,并添加了详细的中文注释:
from functools import lru_cache
import torch
import torch.nn as nn
class KALNConvNDLayer(nn.Module):
def init(self, conv_class, norm_class, conv_w_fun, input_dim, output_dim, degree, kernel_size,
groups=1, padding=0, stride=1, dilation=1, dropout: float = 0.0, ndim: int = 2):
super(KALNConvNDLayer, self).init()
# 初始化参数self.inputdim = input_dim # 输入维度self.outdim = output_dim # 输出维度self.degree = degree # 多项式的阶数self.kernel_size = kernel_size # 卷积核大小self.padding = padding # 填充self.stride = stride # 步幅self.dilation = dilation # 膨胀self.groups = groups # 分组卷积的组数self.base_activation = nn.SiLU() # 基础激活函数self.conv_w_fun = conv_w_fun # 卷积权重函数self.ndim = ndim # 数据的维度(1D, 2D, 3D)self.dropout = None # Dropout层初始化# 根据dropout值选择相应的Dropout层if dropout > 0:if ndim == 1:self.dropout = nn.Dropout1d(p=dropout)elif ndim == 2:self.dropout = nn.Dropout2d(p=dropout)elif ndim == 3:self.dropout = nn.Dropout3d(p=dropout)# 检查groups参数的有效性if groups <= 0:raise ValueError('groups must be a positive integer')if input_dim % groups != 0:raise ValueError('input_dim must be divisible by groups')if output_dim % groups != 0:raise ValueError('output_dim must be divisible by groups')# 创建基础卷积层和归一化层self.base_conv = nn.ModuleList([conv_class(input_dim // groups,output_dim // groups,kernel_size,stride,padding,dilation,groups=1,bias=False) for _ in range(groups)])self.layer_norm = nn.ModuleList([norm_class(output_dim // groups) for _ in range(groups)])# 初始化多项式权重poly_shape = (groups, output_dim // groups, (input_dim // groups) * (degree + 1)) + tuple(kernel_size for _ in range(ndim))self.poly_weights = nn.Parameter(torch.randn(*poly_shape))# 使用Kaiming均匀分布初始化卷积层和多项式权重for conv_layer in self.base_conv:nn.init.kaiming_uniform_(conv_layer.weight, nonlinearity='linear')nn.init.kaiming_uniform_(self.poly_weights, nonlinearity='linear')@lru_cache(maxsize=128) # 使用LRU缓存避免重复计算勒让德多项式
def compute_legendre_polynomials(self, x, order):# 计算勒让德多项式P0 = x.new_ones(x.shape) # P0 = 1if order == 0:return P0.unsqueeze(-1)P1 = x # P1 = xlegendre_polys = [P0, P1]# 递归计算高阶多项式for n in range(1, order):Pn = ((2.0 * n + 1.0) * x * legendre_polys[-1] - n * legendre_polys[-2]) / (n + 1.0)legendre_polys.append(Pn)return torch.concatenate(legendre_polys, dim=1)def forward_kal(self, x, group_index):# 前向传播,处理每个组的输入base_output = self.base_conv[group_index](x) # 基础卷积输出# 将输入归一化到[-1, 1]范围x_normalized = 2 * (x - x.min()) / (x.max() - x.min()) - 1 if x.shape[0] > 0 else xif self.dropout is not None:x_normalized = self.dropout(x_normalized) # 应用Dropout# 计算勒让德多项式legendre_basis = self.compute_legendre_polynomials(x_normalized, self.degree)# 使用多项式权重进行线性变换poly_output = self.conv_w_fun(legendre_basis, self.poly_weights[group_index],stride=self.stride, dilation=self.dilation,padding=self.padding, groups=1)# 合并基础输出和多项式输出,进行归一化和激活x = base_output + poly_outputif isinstance(self.layer_norm[group_index], nn.LayerNorm):orig_shape = x.shapex = self.layer_norm[group_index](x.view(orig_shape[0], -1)).view(orig_shape)else:x = self.layer_norm[group_index](x)x = self.base_activation(x)return xdef forward(self, x):# 前向传播,处理所有组的输入split_x = torch.split(x, self.inputdim // self.groups, dim=1) # 按组分割输入output = []for group_ind, _x in enumerate(split_x):y = self.forward_kal(_x.clone(), group_ind) # 处理每个组output.append(y.clone())y = torch.cat(output, dim=1) # 合并所有组的输出return y
这段代码定义了一个通用的卷积层 KALNConvNDLayer,支持多维卷积(1D、2D、3D),并实现了勒让德多项式的计算。代码中包含了初始化参数、前向传播逻辑、以及对多项式权重的处理等核心功能。
这个程序文件定义了一个名为 KALNConvNDLayer 的神经网络层,主要用于实现带有多项式特性的卷积操作。它的设计允许在不同维度(1D、2D、3D)上进行卷积,并支持使用不同的归一化层和激活函数。该层的核心思想是通过计算勒让德多项式(Legendre polynomials)来增强卷积操作的表达能力。
在初始化方法中,首先设置了一些卷积层的参数,包括输入和输出维度、卷积核大小、步幅、填充、扩张率等。接着,创建了多个基础卷积层和归一化层,具体数量由 groups 参数决定。对于每个组,都会创建一个卷积层和一个归一化层。多项式权重 poly_weights 也在此处初始化,并使用 Kaiming 均匀分布进行初始化,以便在训练开始时具有更好的表现。
compute_legendre_polynomials 方法用于计算勒让德多项式。它利用递归关系生成多项式,并将其缓存以避免重复计算,提高效率。这个方法在前向传播过程中被调用,以便根据输入计算相应的多项式基。
forward_kal 方法是该层的核心前向传播逻辑。它首先对输入应用基础卷积,然后对输入进行归一化,以确保计算的稳定性。接着,计算勒让德多项式,并通过多项式权重进行线性变换。最后,将基础输出和多项式输出相加,并通过归一化和激活函数进行处理。
forward 方法则负责处理输入数据,将其按组分割,并对每个组调用 forward_kal 方法进行处理,最后将所有组的输出拼接在一起。
此外,文件中还定义了三个子类 KALNConv3DLayer、KALNConv2DLayer 和 KALNConv1DLayer,分别用于实现三维、二维和一维的卷积层。这些子类通过调用父类的构造函数,传入相应的卷积和归一化层,简化了不同维度卷积层的创建过程。
整体来看,这个程序文件提供了一种灵活且强大的卷积层实现,能够在多种应用场景中使用,尤其是在需要多项式特征增强的深度学习任务中。
源码文件

源码获取
欢迎大家点赞、收藏、关注、评论啦 、查看👇🏻获取联系方式