verl multi-node train 教程
verl multi-node train
启动 head 节点
⚠️ NumExpr的线程数警告
Note: detected 112 virtual cores but NumExpr set to maximum of 64, check "NUMEXPR_MAX_THREADS" environment variable. Note: NumExpr detected 112 cores but "NUMEXPR_MAX_THREADS" not set, so enforcing safe limit of 8. NumExpr defaulting to 8 threads.🔍 原因:
- 服务器检测到 112 个虚拟核心(多线程处理器)。
NumExpr是一个高效的数值计算库(numpy 背后的计算加速),它默认对线程数做了安全限制以防止过度占用 CPU 资源。- 如果没有设置
NUMEXPR_MAX_THREADS环境变量,它会强制限制为 8 个线程。✅ 解决办法(可选):
如果你需要让NumExpr使用更多线程(比如接近核心数),可以设置:export NUMEXPR_MAX_THREADS=112当然,这通常只是提醒,并不会影响 Ray 或 Verl 的运行,除非你用到大量NumExpr计算。
在 head 节点上执行以下指令,启动 ray
ray start --head --dashboard-host=0.0.0.0
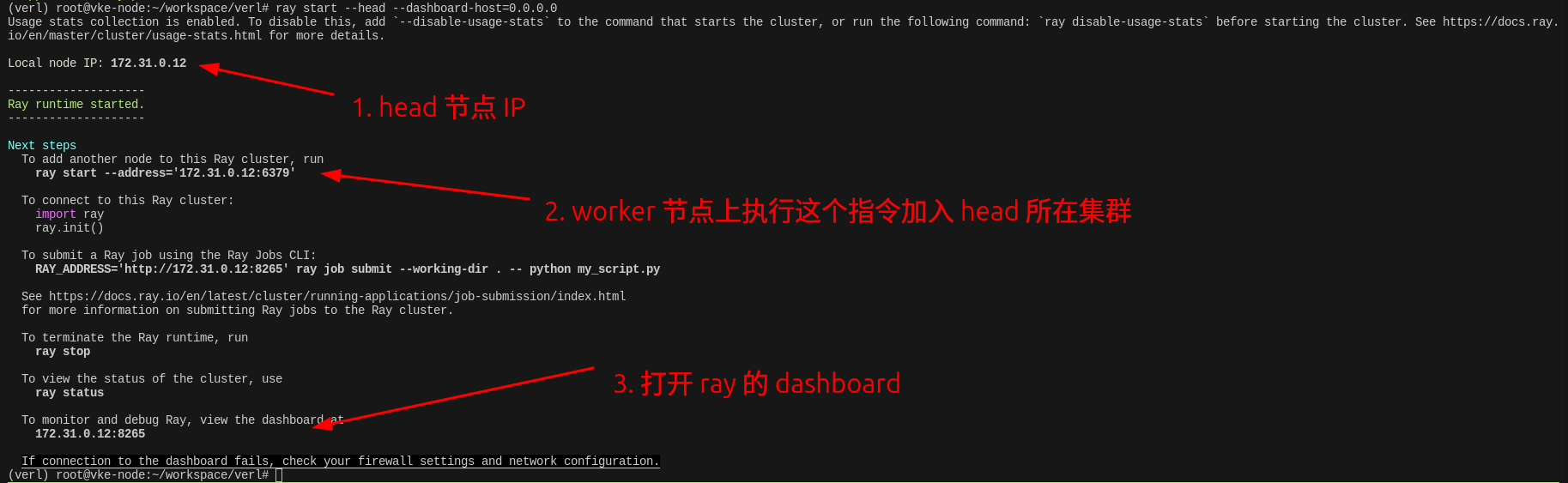
启动 worker 节点
在 worker 节点上执行以下指令,加入集群
ray start --address='172.31.0.12:6379'

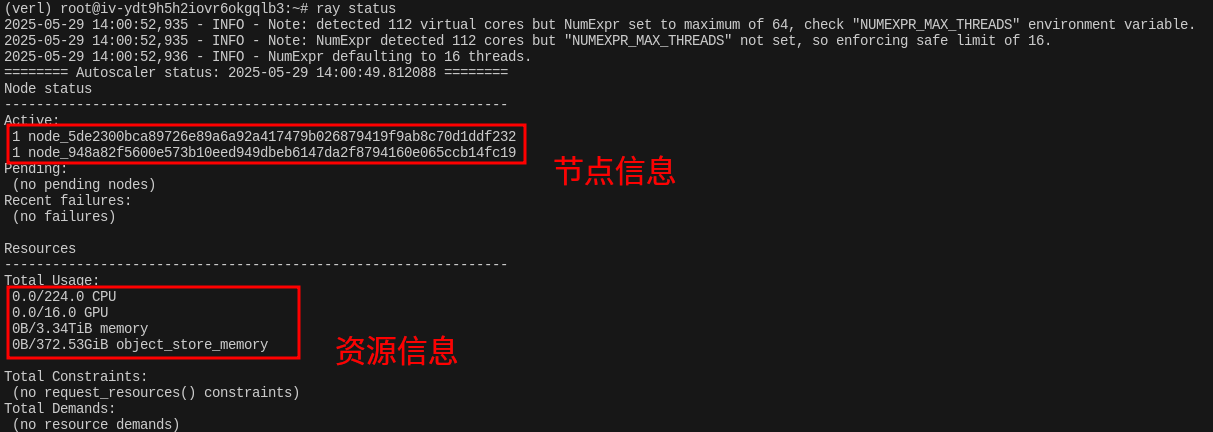
查看集群信息
在任意节点上执行 ray status,可以看到集群的节点信息和资源信息。
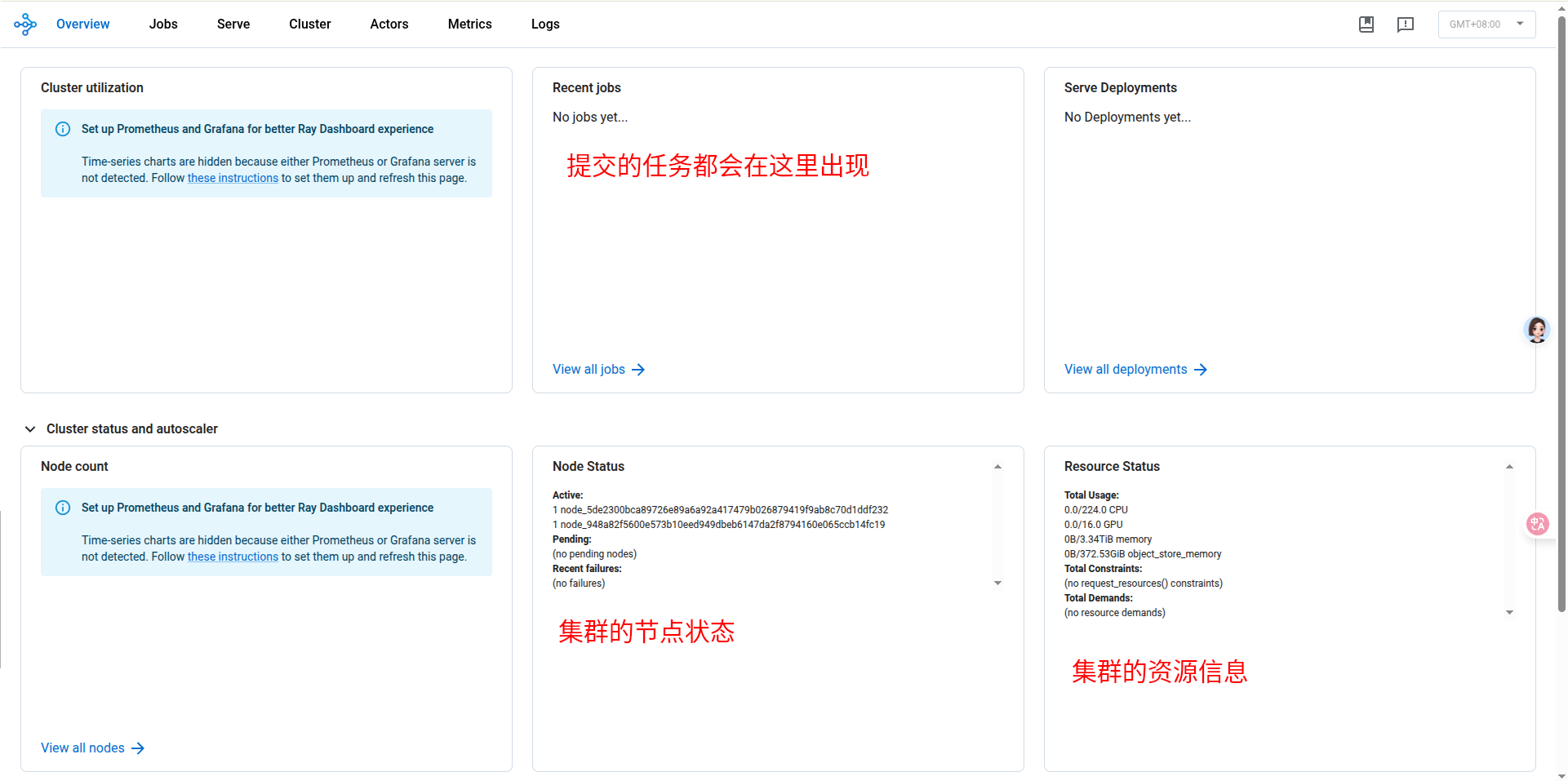
也可以使用 dashboard 查看集群信息。
 ## 执行任务
## 执行任务
只需将需要执行的任务在任意一台机器上向集群提交即可。
- 在配置文件中(verl/trainer/runtime_env.yaml)加上 GLOO_SOCKET_IFNAME 环境变量
working_dir: ./
excludes: ["/.git/"]
env_vars:TORCH_NCCL_AVOID_RECORD_STREAMS: "1"# If you are using vllm<=0.6.3, you might need to set the following environment variable to avoid bugs:# VLLM_ATTENTION_BACKEND: "XFORMERS"GLOO_SOCKET_IFNAME: "eth0"
-
编辑训练的 shell 脚本并运行
注意下面的脚本是在 head 节点上执行的,脚本中的 job submit 地址填的是 127.0.0.1。
set -x
ray job submit --address="http://127.0.0.1:8265" \--runtime-env=verl/trainer/runtime_env.yaml \--no-wait \-- \
python3 -m verl.trainer.main_ppo \algorithm.adv_estimator=grpo \data.train_files=/root/verl/data/hdfs/train.parquet \data.val_files=/root/verl/data/hdfs/test.parquet \data.train_batch_size=1024 \data.max_prompt_length=512 \data.max_response_length=1024 \data.filter_overlong_prompts=True \data.truncation='error' \actor_rollout_ref.model.path=Qwen/Qwen3-32B \actor_rollout_ref.actor.optim.lr=1e-6 \actor_rollout_ref.model.use_remove_padding=True \actor_rollout_ref.actor.ppo_mini_batch_size=128 \actor_rollout_ref.actor.ppo_micro_batch_size_per_gpu=16 \actor_rollout_ref.actor.use_kl_loss=True \actor_rollout_ref.actor.kl_loss_coef=0.001 \actor_rollout_ref.actor.kl_loss_type=low_var_kl \actor_rollout_ref.actor.entropy_coeff=0 \actor_rollout_ref.model.enable_gradient_checkpointing=True \actor_rollout_ref.actor.fsdp_config.param_offload=False \actor_rollout_ref.actor.fsdp_config.optimizer_offload=False \actor_rollout_ref.rollout.log_prob_micro_batch_size_per_gpu=16 \actor_rollout_ref.rollout.tensor_model_parallel_size=4 \actor_rollout_ref.rollout.name=vllm \actor_rollout_ref.rollout.gpu_memory_utilization=0.6 \actor_rollout_ref.rollout.n=8 \actor_rollout_ref.ref.log_prob_micro_batch_size_per_gpu=8 \actor_rollout_ref.ref.fsdp_config.param_offload=True \algorithm.use_kl_in_reward=False \trainer.critic_warmup=0 \trainer.logger=['console','wandb'] \trainer.project_name='verl_grpo_example_gsm8k' \trainer.experiment_name='qwen3_32b_2nodes' \trainer.n_gpus_per_node=8 \ # 每个节点 8 GPUtrainer.nnodes=2 \ # 两个节点trainer.save_freq=20 \trainer.test_freq=5 \trainer.total_epochs=1 $@
流式查看 log
使用已下指令在终端查看流式日志,或在 dashboard 网页中查看
ray job logs raysubmit_iCE8j5WD3fN5W9uX -f
模型合并
两个节点分布式训练之后的模型权重文件会分别保存在两个节点上,此时我们需要将训练完的权重合并到同一个节点的同一个目录中。
官方在 verl/scripts/model_merger.py 中实现了模型合并脚本,用于将 FSDP 和 Megatron 后端的 checkpoints 合并成 huggingface 模型。
- To merge FSDP checkpoints:
python scripts/model_merger.py merge \--backend fsdp \--local_dir checkpoints/verl_fsdp_gsm8k_examples/qwen2_5_0b5_fsdp_saveload/global_step_1/actor \--target_dir /path/to/merged_hf_model
- To merge Megatron checkpoints:
python scripts/model_merger.py merge \--backend megatron \--tie-word-embedding \--local_dir checkpoints/verl_megatron_gsm8k_examples/qwen2_5_0b5_megatron_saveload/global_step_1/actor \--target_dir /path/to/merged_hf_model
这里我们使用 FSDP 的方式训练的模型,所以我们在 scripts/ 路径下,新建脚本,编辑如下信息:
python scripts/model_merger.py merge \--backend fsdp \--local_dir /tmp/ray/session_2025-05-28_15-53-09_958478_132003/runtime_resources/working_dir_files/_ray_pkg_c461f3378ff510ed/checkpoints/verl_grpo_example_gsm8k/qwen3_32b_2nodes/global_step_7/actor \--target_dir /data/models/verl_results
执行 shell 脚本,就可以在我们指定的路径下生成 huggingface 的模型,以便后面的部署推理。

坑
ValueError: Model architectures [‘Qwen3ForCausalLM’] failed to be inspected. Please check the logs for more details.
ValueError: Model architectures ['Qwen3ForCausalLM'] failed to be inspected. Please check the logs for more details.ERROR 11-29 06:51:24 registry.py:297] RuntimeError: Error raised in subprocess:
ERROR 11-29 06:51:24 registry.py:297] Error: mkl-service + Intel(R) MKL: MKL_THREADING_LAYER=INTEL is incompatible with libgomp-a34b3233.so.1 library.
ERROR 11-29 06:51:24 registry.py:297] Try to import numpy first or set the threading layer accordingly. Set MKL_SERVICE_FORCE_INTEL to force it.
github issue 中有解决方案,最终是更新了 numpy 版本解决的。