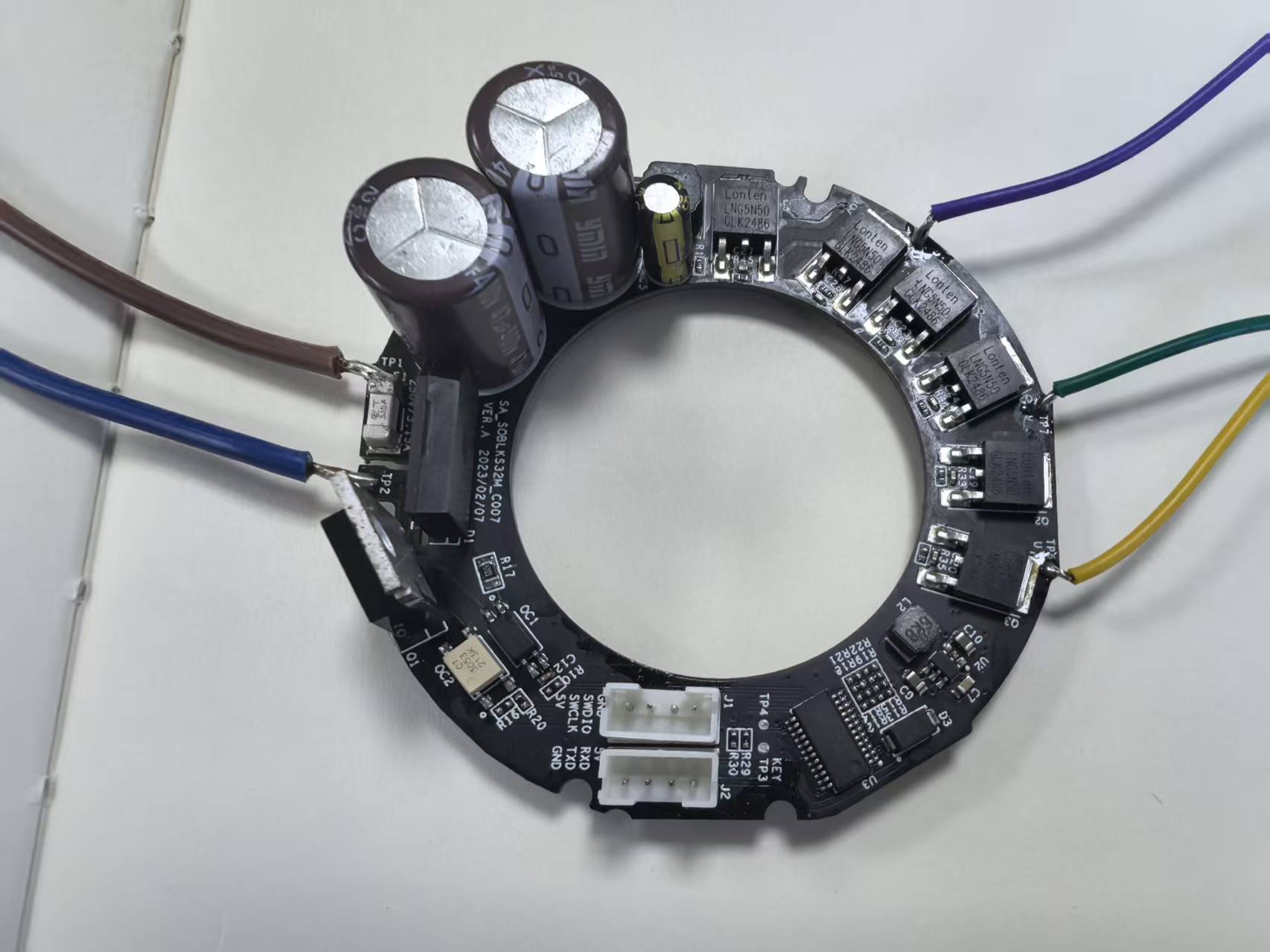
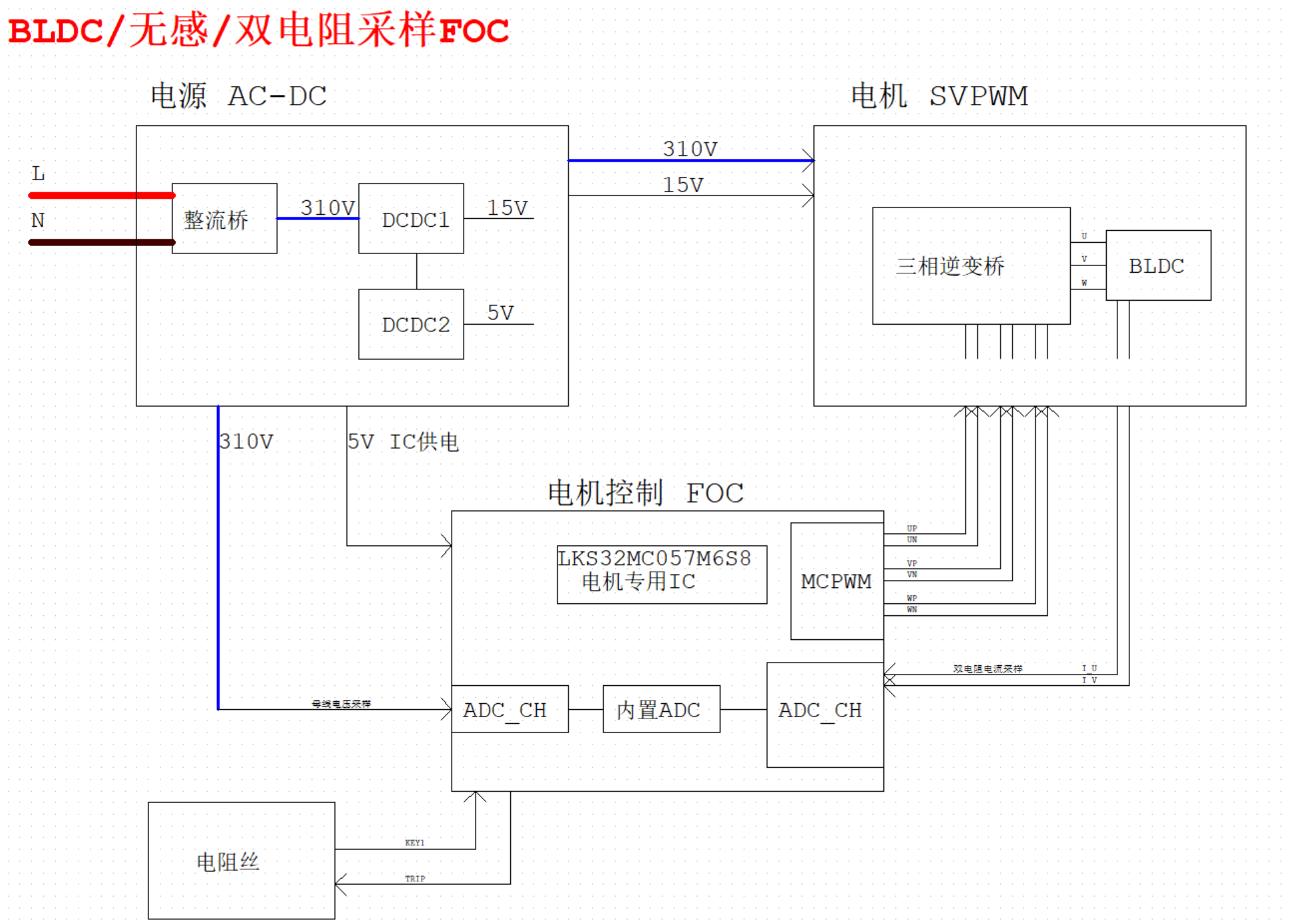
FOC-双电阻采样-无刷-AC/DC(吹风筒项目)
吹风机项目
- 了解基本原理
①档位开关控制
②发热元件电路
③电机驱动电路
https://zhuanlan.zhihu.com/p/495852697
由于电源经过二极管VD半波整流,电热丝的发热和电动机的转速都有所降低,吹出低温弱风
市面上有很多大功率吹风机,有些还附加了其他功能,如细微水离子吹风机,还有负离子吹风机,其中离子吹风机价格高昂,像徕芬,戴森。



痛点:
因为吹风机的风是干风,会损伤毛发,而加了离子发生器的吹风机,吹出来的带离子的风,能中和头发静电,解决因摩擦,干燥,导致的头发相互吸引,纠结的问题,
细微水离子吹风机则能将空气中水分子进行超微粒子处理,从发芯深处滋润头发,收缩毛鳞片,使头皮脂变得易溶。
- 电路详细设计
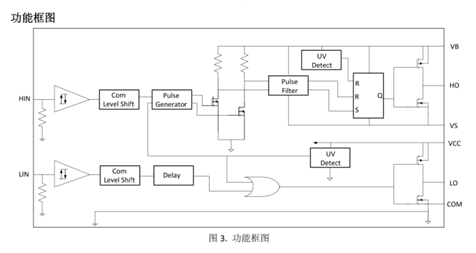
- LKS580
电机的前级驱动
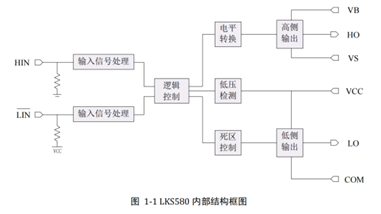

高侧耐压600v
IC供电10~25V
输入电平3.3/5/15V
支持双通道延时匹配
浮动电源600V
驱动电流2/2.5A
欠压保护10V
导通延时200ns
关断延时150ns
死区时间100ns
工作温度 -40~150℃
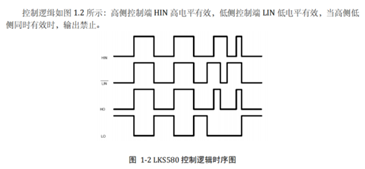
HIN高有效,LIN低有效
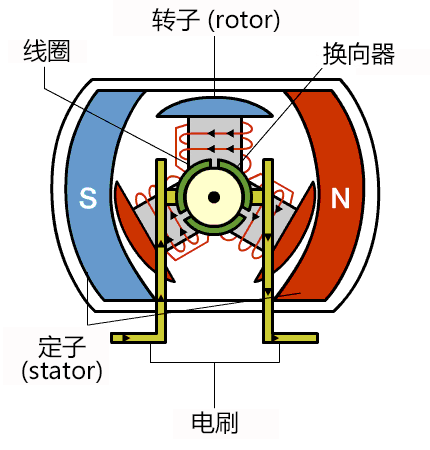
电机分有刷电机和无刷电机
有刷电机是适用于低速,摩擦损耗大,寿命是无刷电机的十分之一,优点是稳定和低成本
BLDC电机的第一个特点是“高效率”。可以控制它的回旋力(扭矩)始终保持最大值。DC电机(有刷电机)的话,旋转过程中最大扭矩只能保持一个瞬间,无法始终保持最大值。若DC电机(有刷电机)想要得到和BLDC电机一样大的扭矩,只能加大它的磁铁。这就是为什么小型BLDC电机也能发出强大力量的原因。
BLDC电机可以丝毫不差的得到你所想要的扭矩、旋转数等。
除此之外还有耐用,电气噪音小等特点。
尽管在120度通电控制下合成磁通量的方向会发生旋转,但其方向不过只有6种,这一现象将反复出现。这一动作将变得生硬。有时这动作还会发出噪音。
能消除120度通电控制的缺点,实现流畅的转动的正是“正弦波控制”。
动画图解:无刷直流(BLDC)电机的原理及正确的使用方法 - 知乎 (zhihu.com)
https://zhuanlan.zhihu.com/p/265072304
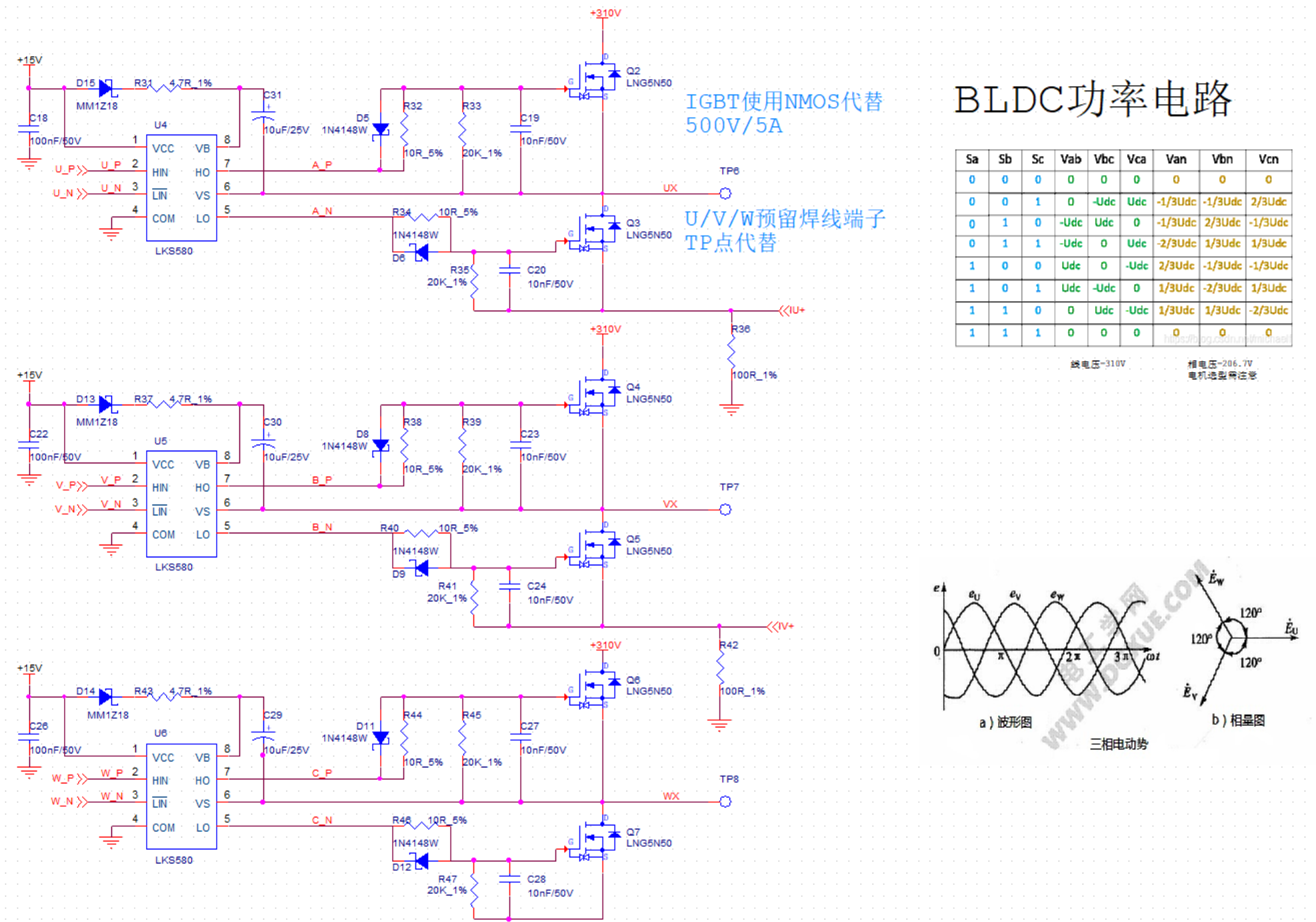
而三相逆变桥就是为了电压过零变相,改变作用力的方向。
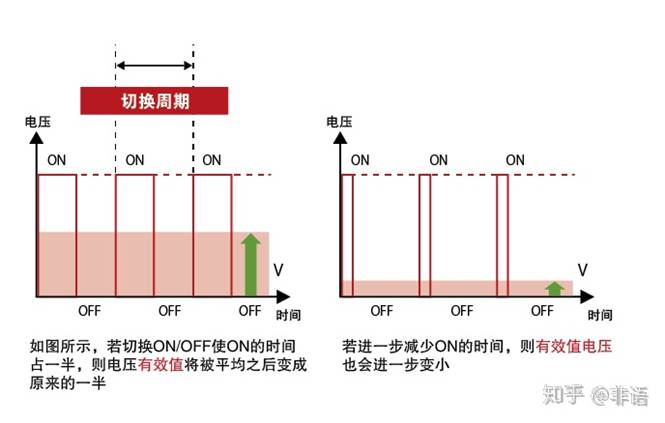
而用pwm驱动是为了调整占空比模拟正弦信号,让电机转动的更加丝
滑。
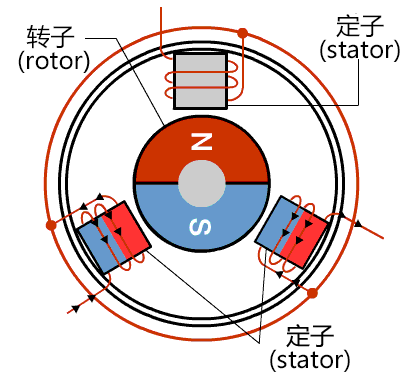
实际上,在以上的说明中,还有一点没有提到。即BLDC电机中的传感器的存在。BLDC电机的控制是配合着转子(永磁体)的位置(角度)进行的。因此,获取转子位置的传感器是必需的。若没有传感器得知永磁体的方向时,转子可能会转至意料之外的方向。有传感器提供信息的话,就不会出现这样的情况了。

上图显示的是BLDC电机主要的位置检测用传感器的种类。根据控制方式的不同,需要的传感器也是不同的。在120度通电控制中,为判断要对哪个相通电,配备了可每60度输入一次信号的霍尔效应传感器。另一方面,对于精密控制合成磁通量的“矢量控制”(在下一项中说明)来说,转角传感器或光电编码器等高精度传感器较为有效。
通过使用这些传感器可以检测出位置,但也会带来一些缺点。传感器防尘能力较弱,而且维护也是不可或缺的。可使用的温度范围也会缩小。使用传感器或为此增加配线都会造成成本的上升,而且高精度传感器本身就价格高昂。于是,“无传感器”这一方式登场了。它不使用位置检测用传感器,以此控制成本,且不需要传感器相关的维护。但此次为了说明原理,因此假定已从位置传感器获得了信息来吧。
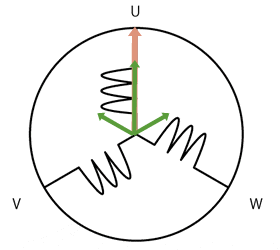
在这里登场的便是矢量控制(FOC)了。矢量控制可通过坐标变换,把3相的交流值作为2相的直流值进行计算,因此可简化控制。但是,矢量控制计算需要高分辨率下的转子的位置信息。位置检测有两种方法,即使用光电编码器或转角传感器等位置传感器的方法,以及根据各相的电流值进行推算的无传感器方法。通过该坐标变换可直接控制扭矩(旋转力)的相关电流值,从而实现没有多余电流的高效控制。
但是,矢量控制中需要进行使用三角函数的坐标变换,或复杂的计算处理。因此,大多情况下都会使用计算能力较强的微电脑作为控制用微电脑,比如配备了FPU(浮点运算器)的微电脑等。
补充:
SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。
反电动势EFM
永磁同步电机PMSM和BLDC的区别,异步电机?步进式电机?
霍尔HALL
了解FOC和ESC,SPWM和SVPWM,OPA和CMP
SVPWM原理与应用-CSDN博客
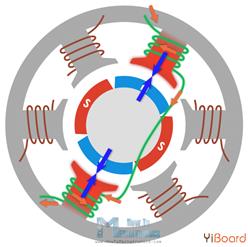
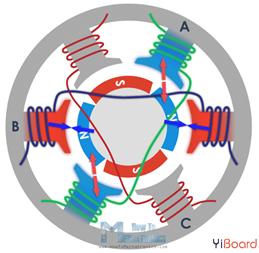
为了提高电动机的效率,我们可以将两个相对的线圈作为单个线圈缠绕,从而产生与转子极相反的极,从而我们将获得
双吸引力。
除了FOC控制电机,还有一种方法是ESC
ESC(电子速度控制器)如何工作
ESC或电子速度控制器通过激活适当的MOSFET来控制无刷电机的运动或速度,从而产生旋转磁场,从而使电机旋转。 ESC经过6个间隔的频率越高或越快,电机的速度就越高。
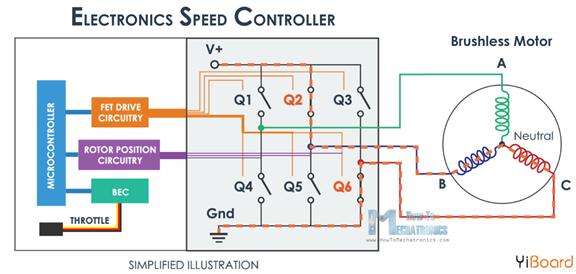
无刷电机和电子调速器(ESC)是如何工作的 - Arduino专区 - 一板网电子技术论坛
然而,这里有一个重要的问题,那就是我们如何知道何时激活哪个相位。答案是我们需要知道转子的位置,并且有两种常用的方法来确定转子位置。
第一种常用方法是使用嵌入定子中的霍尔效应传感器,彼此相等地布置120或60度。
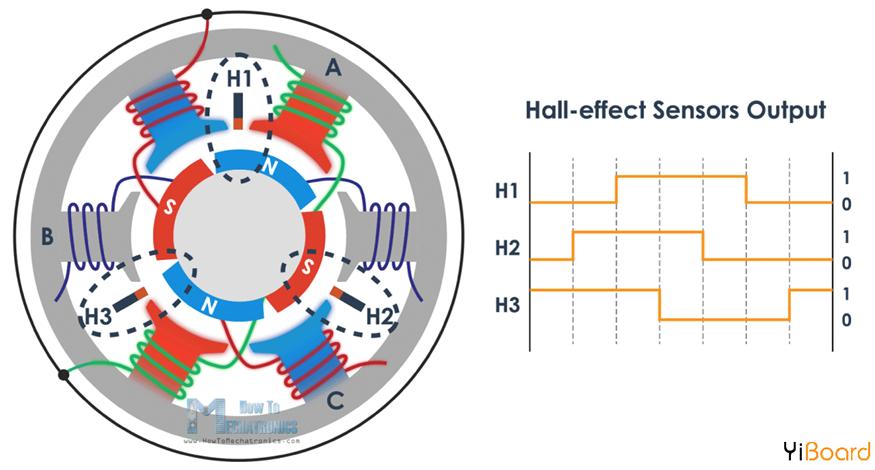
使用霍尔效应传感器的无刷电机转子位置
当转子永磁体旋转时,霍尔效应传感器感测磁场并为一个磁极产生逻辑“高”,或者为相反极产生逻辑“低”。根据该信息,ESC知道何时激活下一个换向顺序或间隔。
用于确定转子位置的第二种常用方法是通过检测反电动势或反电动势。反电动势由于产生磁场的完全相反的过程而发生,或者当移动或变化的磁场通过线圈时,它在线圈中感应出电流。
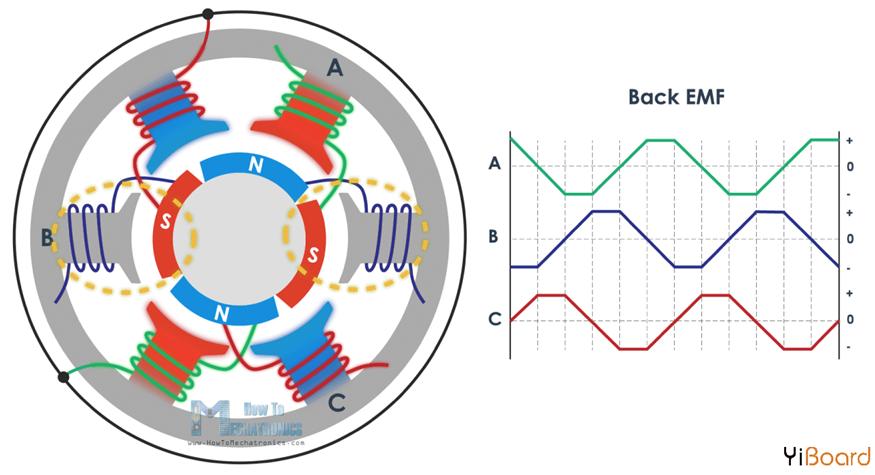
无刷电机中的反电动势
因此,当转子的移动磁场通过自由线圈或者未激活的线圈时,它将在线圈中引起电流流动,结果在该线圈中将发生电压降。 ESC在发生这些电压降时捕获这些电压降,并根据它们预测或计算何时应发生下一个间隔。
三相永磁同步电机的foc有感和无感程序控制(总结:理论1)_无感foc和有感区别-CSDN博客
FOC三种采样电流:FOC 电流采样方案对比(单电阻/双电阻/三电阻) - 小麦大叔 - 博客园
https://blog.csdn.net/differently1234/article/details/118084870?spm=1001.2101.3001.6650.2&utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromBaidu%7ERate-2-118084870-blog-95865589.pc_relevant_vip_default&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromBaidu%7ERate-2-118084870-blog-95865589.pc_relevant_vip_default&utm_relevant_index=3
此外需要考虑IGBT的死区时间,避免桥臂直通
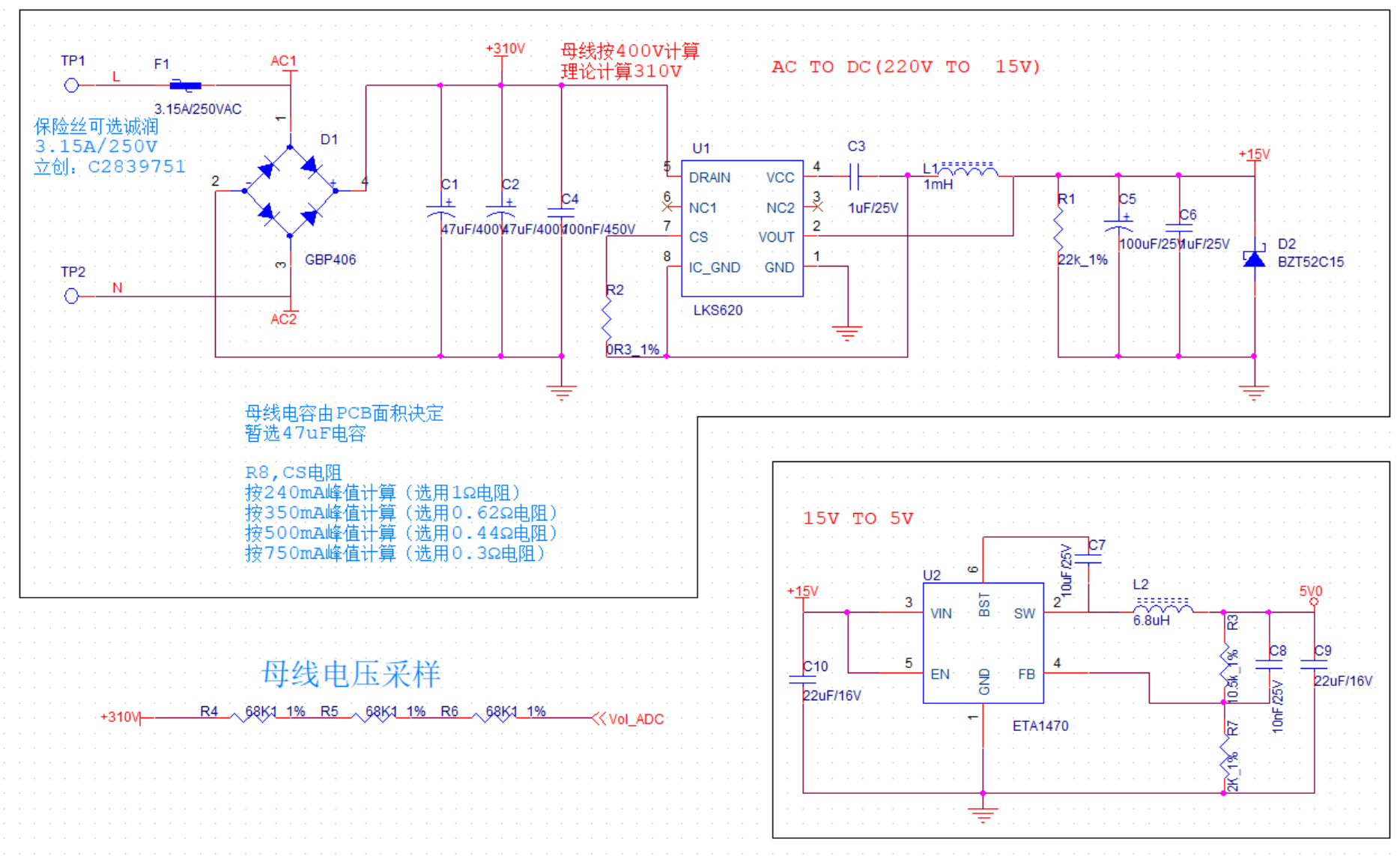
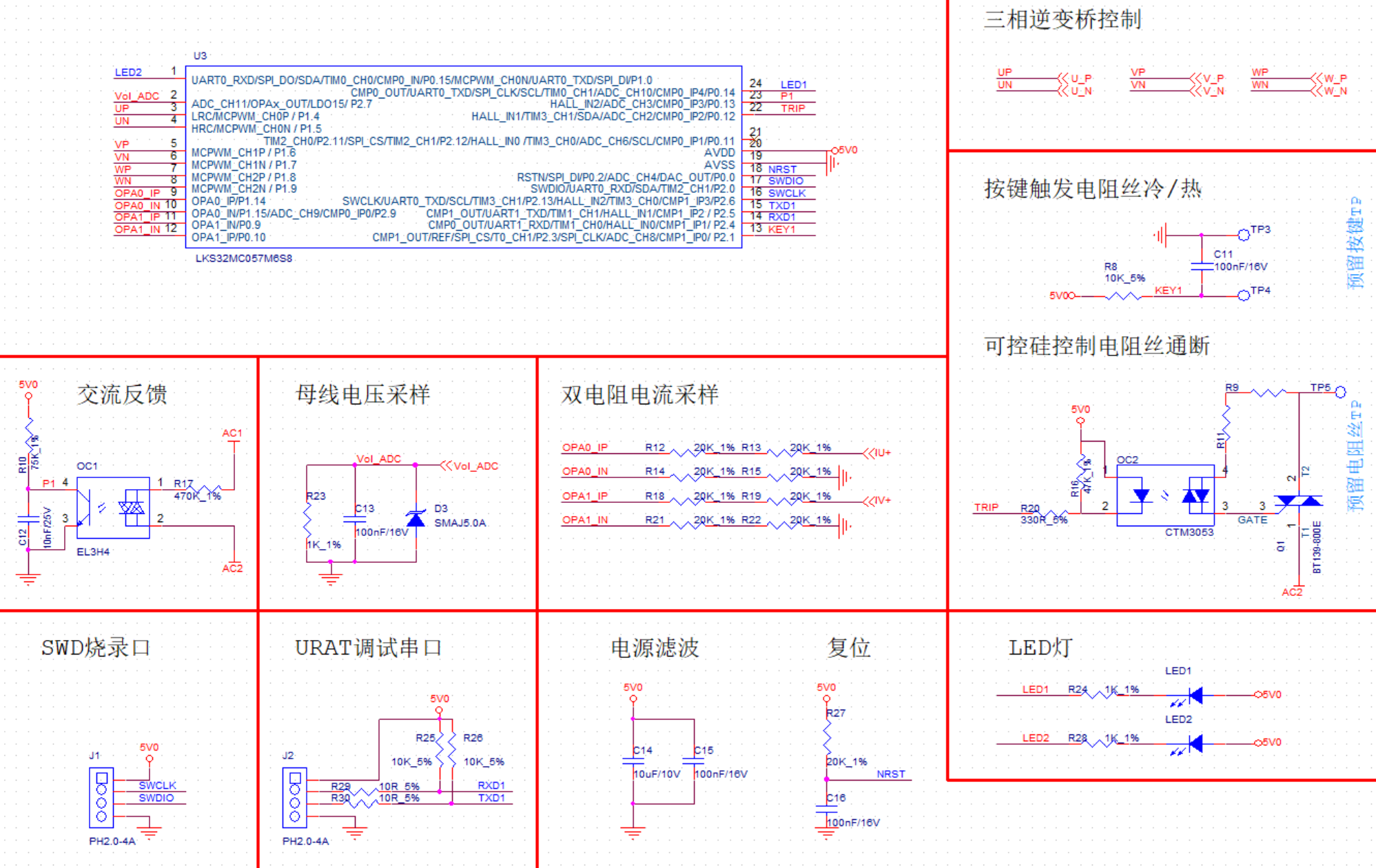
我做的这个板子的原理图,可以参考一下
参考原理图:
喜欢谢工碎碎念~点个关注~