[激光原理与应用-257]:理论 - 几何光学 - 光束整形
几何光学的光束整形主要利用反射镜、透镜、棱镜等折反光学元件,通过分割、旋转、重排或折射光线路径,实现对光束形状、能量分布及传播特性的调控。以下从技术原理、核心方法、典型应用及发展趋势四方面展开分析:
一、技术原理:光线路径的几何操控
几何光学将光视为沿直线传播的射线,通过改变光线路径实现光束整形。其核心原理包括:
- 折射定律:光从一种介质进入另一种介质时,传播方向发生偏折(如透镜聚焦)。
- 反射定律:光在镜面反射时,入射角等于反射角(如反射镜改变光束方向)。
- 能量守恒:通过设计光学元件的曲面形状,实现光束能量的重新分配(如非球面透镜组将高斯光束转换为平顶光束)。
二、核心方法:从静态到动态的调控手段
根据调控方式,几何光学的光束整形方法可分为以下四类:
1. 静态光束整形
非球面透镜组整形
通过双自由曲面透镜设计,构建输入-输出光线映射函数,实现激光束能量再分配。例如,将高斯光束转换为平顶光束,能量利用率高且耐高温,但需严格稳定输入光强。
应用:大功率激光加工(如切割、焊接)、金属3D打印。阶梯镜整形法
将慢轴方向光束等分为N份,再通过第二组阶梯镜在快轴方向重排,均衡快慢轴的BPP值(光束参数积),提升光束质量。
应用:半导体激光合束、高亮度激光输出。波导整形法
利用波导结构约束光束传播路径,通过调整波导截面形状实现光束整形。
应用:集成光学、光通信。
2. 动态光束整形
液晶空间光调制器(SLM)整形
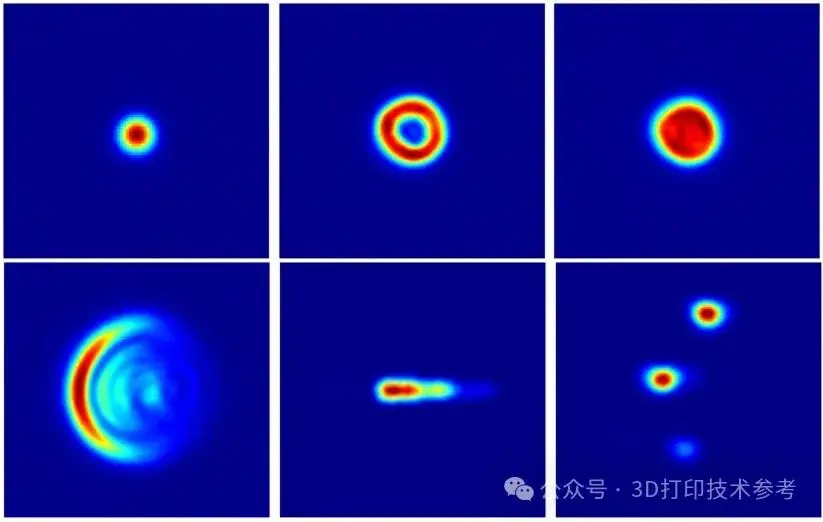
通过控制液晶分子的双折射效应,实时调控输入光束的相位及幅度。例如,通过编程改变电压,动态生成方形、环形或星形光斑。
应用:复杂零件加工、光学镊子、光遗传学。微镜阵列整形
由微反射镜或可变焦微透镜阵列组成,通过调整微镜角度或透镜焦距实现光束动态调控。例如,正交光楔阵列可分割光束并调整相位分布。
应用:光刻、激光显示、自适应光学。
3. 多孔径光束聚焦法
复眼透镜阵列整形
由矩形或六角形微透镜阵列与聚焦透镜组成,将输入光斑分割后累加,实现光场匀化。例如,11×11矩形阵列可生成平顶光斑。
应用:激光焊接、3D打印、光生物成像。多孔径光束叠加法
通过微镜阵列将输入光束分为若干子光束,再经聚焦透镜叠加输出,实现光束整形。
应用:准分子激光器、光刻机。
4. 光阑法与场映射法
光阑法
通过控制光阑的形状和大小,调整光束的横截面形状(如圆形、矩形)。
应用:激光微加工、光纤通信、光学传感。场映射法
利用透镜阵列或光栅阵列将输入光束的场分布映射到输出光束上,通过调整映射元件参数改变光束形状。
应用:单模激光器整形、光学测量。
三、典型应用场景:从工业到前沿科学
激光加工
- 切割与焊接:非球面透镜组将高斯光束转换为平顶光束,使切割边缘更光滑,减少热影响区;平顶光束的均匀能量分布可降低焊接热应力,提高焊缝强度。
- 打孔与打标:通过调整光束形状和能量分布,适应不同材料和孔径需求,提高打孔精度和标记清晰度。
金属3D打印
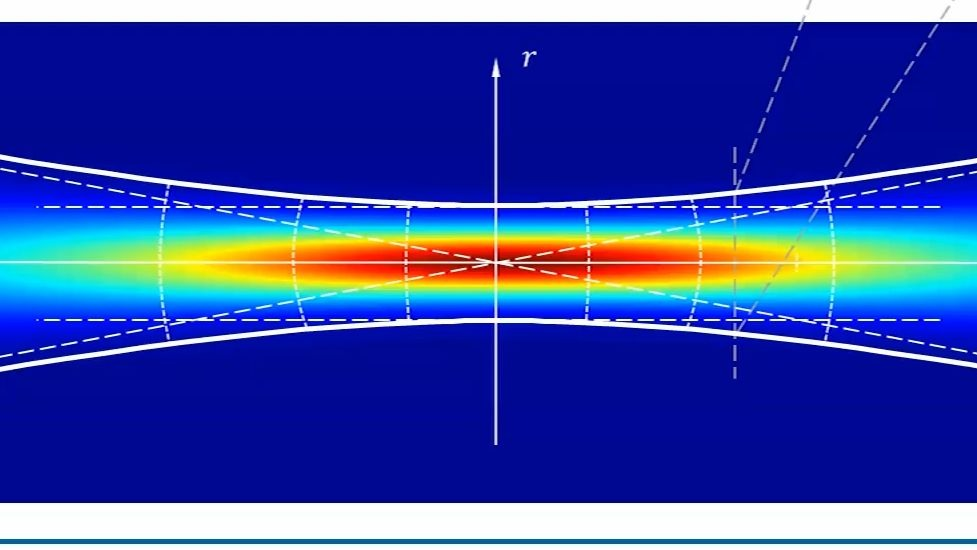
光束整形技术可精确控制熔池温度分布和凝固过程,抑制孔隙、飞溅等缺陷,提高打印件致密度和力学性能。例如,贝塞尔光束可形成深窄熔池,增强层间连接。光通信
- 光纤通信:通过整形高斯光束为平顶光束或环形光束,优化光束在光纤中的传输特性,提高传输容量和质量。
- 自由空间光通信:调整光束形状和指向性,克服大气湍流影响,降低误码率和噪声干扰。
医疗领域
- 激光手术:通过整形光束形状和能量分布,实现组织精确切割和止血,减少热损伤和烟雾产生。
- 激光治疗:调整光束形状以实现对病灶部位的精确照射,优化治疗效果。
四、发展趋势:智能化与集成化
动态环境适配
开发自适应光束整形系统,实时响应环境变化(如温度、振动)。例如,在自动驾驶激光雷达中,通过SLM动态调整光束方向以补偿车辆颠簸。芯片级集成
将光束整形功能集成到光子芯片中,实现低功耗、小型化。例如,英特尔的硅光子平台集成SLM与调制器,支持数据中心内的高速光互连。AI驱动的逆向设计
结合深度学习算法,自动优化光束整形元件的结构参数。例如,谷歌提出“可微分衍射光学”方法,将DOE设计周期从数周缩短至数小时。超表面技术
基于亚波长结构(如纳米天线)的二维超表面,实现超薄、高效率的光束整形。例如,哈佛大学研发的金属超表面可将任意入射光转换为涡旋光束,厚度仅为波长的1/10。