OPENCV 基于旋转矩阵 旋转Point2f
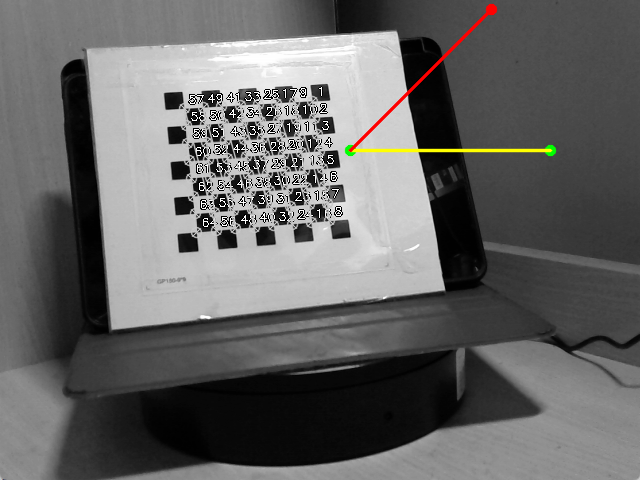
测试效果
创建两个点,让第二个点绕第一个点转45度
代码解析
Mat a; a = imread("D:\\0.bmp", -1);
读取一张图片当作背景板
Point2f p1(350, 150); Point2f p2(550.0f, 150.0f);
创建两个点
cv::Mat mat = getRotationMatrix2D(p1, 45, 1.0);
生成旋转矩阵,中心点为p1
std::vector<cv::Point2f> points = { p2 }; cv::Mat srcPoint(points);
将p2的数据放进一个mat对象中
cv::Mat dstPoint; // 应用变换 cv::transform(srcPoint, dstPoint, mat);
创建结果Mat 执行矩阵变换
float x = dstPoint.at<float>(0, 0); float y = dstPoint.at<float>(0, 1); cv::Point2f rotatedPoint(x, y);
输出结果也是一个Mat对象 从这个Mat对象中取出仿射变换之后的点坐标数据
std::cout << "Rotated Point: " << rotatedPoint << std::endl; circle(mergedImage, p1, 3, Scalar(0, 255, 0), 3, LINE_AA); circle(mergedImage, p2, 3, Scalar(0, 255, 0), 3, LINE_AA); circle(mergedImage, rotatedPoint, 3, Scalar(0, 0, 255), 3, LINE_AA); line(mergedImage,p1,p2, Scalar(0, 255, 255),2,LINE_AA); line(mergedImage, p1, rotatedPoint, Scalar(0, 0, 255), 2, LINE_AA);
三个点坐标数据,绘制到图像上,以便确认执行正确。
原始代码
Mat a;a = imread("D:\\0.bmp", -1);cv::Mat mergedImage;std::vector<cv::Mat> channels = { a, a, a };cv::merge(channels, mergedImage);Point2f p1(350, 150);Point2f p2(550.0f, 150.0f);cv::Mat mat = getRotationMatrix2D(p1, 45, 1.0);std::vector<cv::Point2f> points = { p2 };cv::Mat srcPoint(points);cv::Mat dstPoint;// 应用变换cv::transform(srcPoint, dstPoint, mat);// 提取结果float x = dstPoint.at<float>(0, 0);float y = dstPoint.at<float>(0, 1);cv::Point2f rotatedPoint(x, y);std::cout << "Rotated Point: " << rotatedPoint << std::endl;circle(mergedImage, p1, 3, Scalar(0, 255, 0), 3, LINE_AA);circle(mergedImage, p2, 3, Scalar(0, 255, 0), 3, LINE_AA);circle(mergedImage, rotatedPoint, 3, Scalar(0, 0, 255), 3, LINE_AA);line(mergedImage,p1,p2, Scalar(0, 255, 255),2,LINE_AA);line(mergedImage, p1, rotatedPoint, Scalar(0, 0, 255), 2, LINE_AA);imshow("1", mergedImage);waitKey();