Python OpenCV图像处理与深度学习:Python OpenCV特征检测入门
特征检测与描述:探索图像中的关键点
学习目标
通过本课程,学员们将掌握特征检测的基本概念,了解如何使用OpenCV库中的SIFT和SURF算法进行特征点检测和特征描述符的计算。实验将通过理论讲解与实践操作相结合的方式,帮助学员深入理解特征检测在计算机视觉中的应用。
相关知识点
- Python OpenCV特征检测与描述
学习内容
1 Python OpenCV特征检测与描述
1.1 特征检测的基本概念
在计算机视觉领域,特征检测是识别图像中具有特定属性的点、线或区域的过程。这些特征点通常具有良好的可重复性和稳定性,即使在图像发生旋转、缩放或光照变化的情况下,也能被准确地检测出来。特征检测在图像匹配、物体识别、场景重建等多个领域有着广泛的应用。
特征点的选择标准通常包括:局部性、独特性、可重复性和稳定性。局部性意味着特征点应该能够通过其周围的像素值来定义;独特性确保了特征点在图像中是独一无二的;可重复性是指在不同的图像条件下,相同的特征点能够被检测到;稳定性则保证了特征点在图像变换后仍然保持不变。
在OpenCV中,提供了多种特征检测算法,如SIFT(Scale-Invariant Feature Transform)、SURF(Speeded Up Robust Features)等。这些算法能够有效地检测图像中的特征点,并生成描述符,用于后续的匹配和识别任务。
1.2 SIFT算法原理与实现
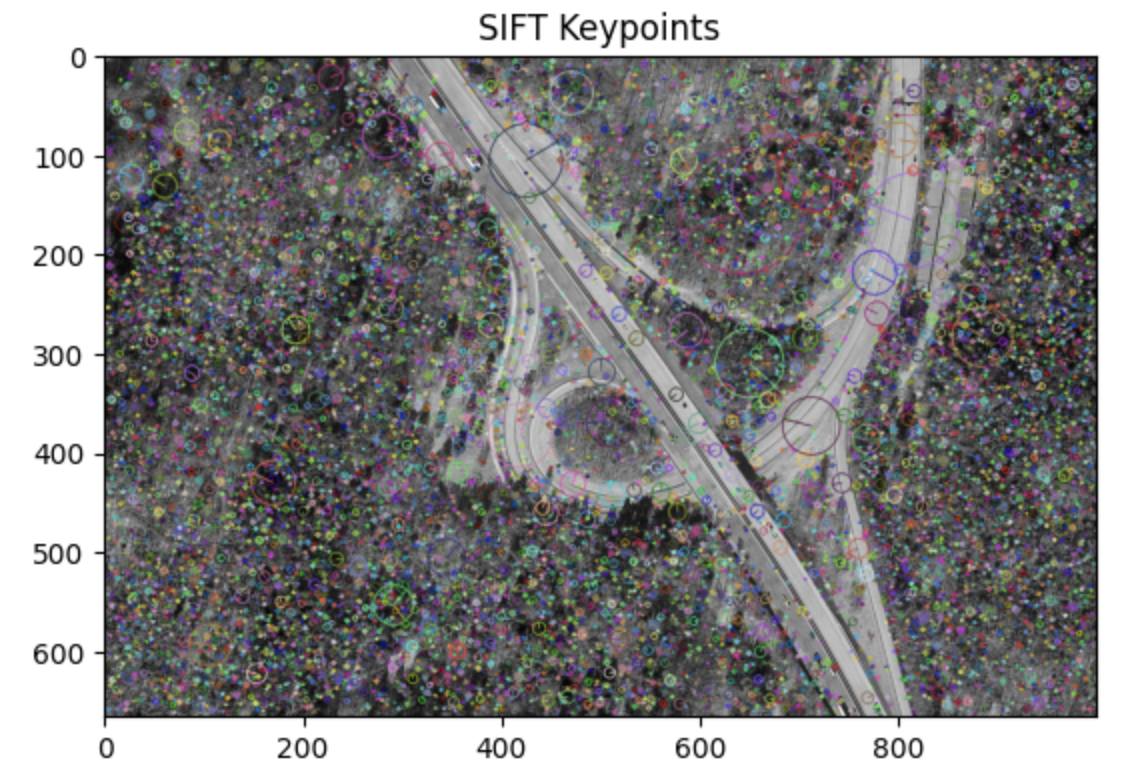
SIFT算法是一种广泛使用的特征检测和描述方法,它能够检测图像中的关键点,并生成描述符,这些描述符对图像的旋转、缩放和光照变化具有不变性。SIFT算法的主要步骤包括:
- 尺度空间极值检测:通过构建高斯金字塔,检测图像中的关键点。这些关键点是在不同尺度下检测到的局部极值点。
- 关键点定位:通过拟合局部模型来精确确定关键点的位置和尺度,同时去除低对比度的关键点和边缘响应。
- 方向赋值:为每个关键点分配一个或多个方向,以实现旋转不变性。
- 关键点描述符:在关键点周围的一个邻域内,计算梯度方向直方图,生成描述符。
执行以下指令获取测试图片。
wget https://model-community-picture.obs.cn-north-4.myhuaweicloud.com/ascend-zone/notebook_datasets/3db8111c2fac11f0a229fa163edcddae/example.jpg
下面是一个使用OpenCV实现SIFT特征检测的Python代码示例:
import cv2
import numpy as np
import matplotlib.pyplot as plt# 读取图像
image = cv2.imread('example.jpg', cv2.IMREAD_GRAYSCALE)# 创建SIFT对象
sift = cv2.SIFT_create()# 检测关键点和计算描述符
keypoints, descriptors = sift.detectAndCompute(image, None)# 绘制关键点
image_with_keypoints = cv2.drawKeypoints(image, keypoints, None, flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
# 显示图像
plt.imshow(image_with_keypoints, cmap='gray')
plt.title('SIFT Keypoints')
plt.show()
1.3 ORB算法原理与实现
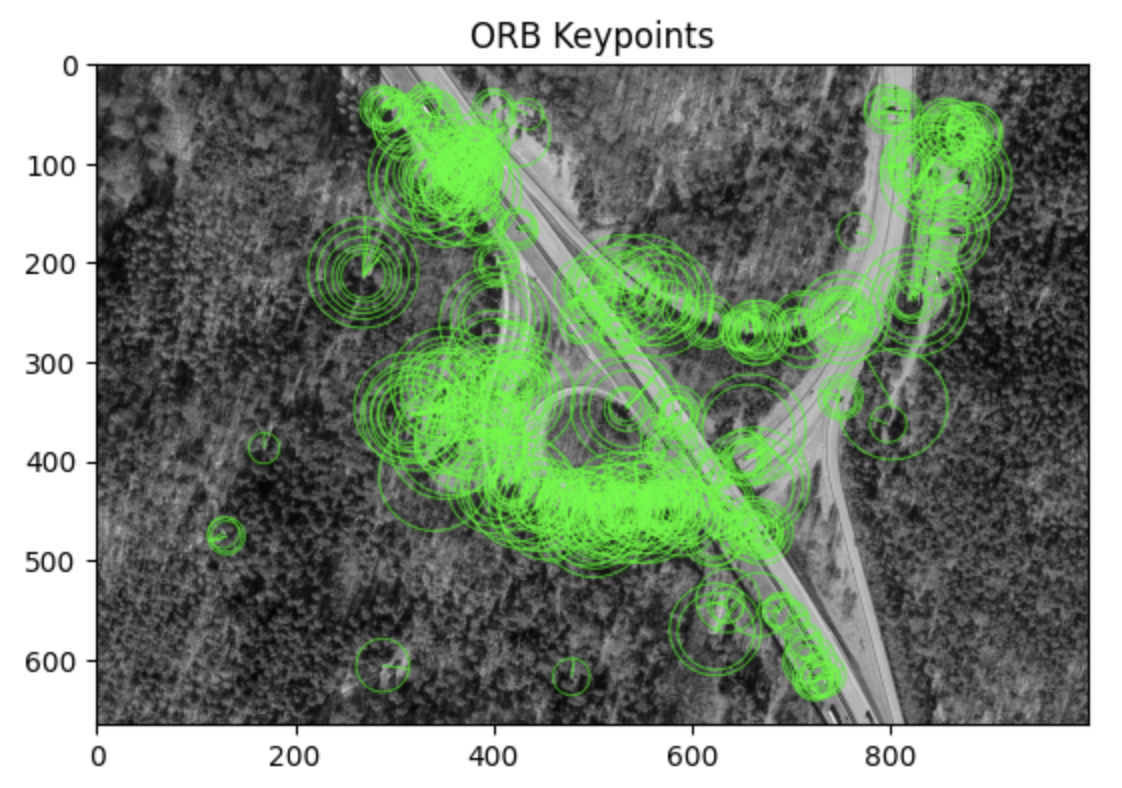
ORB算法是对SIFT的高效替代方案,它结合了FAST关键点检测器和BRIEF描述符,同时加入了方向信息,使其具备旋转不变性。ORB的设计目标是在保持较好特征识别性能的同时显著提高计算效率,非常适合实时应用和移动设备。
ORB算法的主要步骤包括:
-
关键点检测:使用FAST(Features from Accelerated Segment Test)算法快速检测图像中的角点作为关键点。
-
关键点筛选与排序:通过Harris角点响应函数对FAST检测出的关键点进行评分,并保留最显著的关键点。
-
方向赋值:为了实现旋转不变性,ORB对每个关键点计算其主方向,并在后续描述符计算中使用该方向。
-
描述符生成:基于BRIEF(Binary Robust Independent Elementary Features)描述符的思想,结合关键点方向对描述符进行旋转处理,从而生成具有旋转不变性的二进制描述符。
-
特征匹配:由于ORB描述符是二进制形式,可以使用汉明距离快速进行匹配,进一步提升处理速度。
ORB算法的主要优势在于其计算速度快、资源占用低、无需专利许可,是计算机视觉任务中广泛使用的特征检测与描述方法。
下面是一个使用OpenCV实现ORB特征检测的Python代码示例:
import cv2
import numpy as np# 读取图像(灰度)
image = cv2.imread('example.jpg', cv2.IMREAD_GRAYSCALE)# 创建 ORB 对象(默认最多检测 500 个关键点)
orb = cv2.ORB_create(nfeatures=500)# 检测关键点和计算描述符
keypoints, descriptors = orb.detectAndCompute(image, None)# 绘制关键点
image_with_keypoints = cv2.drawKeypoints(image, keypoints, None, color=(0, 255, 0), flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS
)
# 显示图像
plt.imshow(image_with_keypoints, cmap='gray')
plt.title('ORB Keypoints')
plt.show()
从此刻开始,你是不是有点看不懂了?…欢迎讨论,我们一起交流!