从物理模拟器和世界模型中学习具身智能
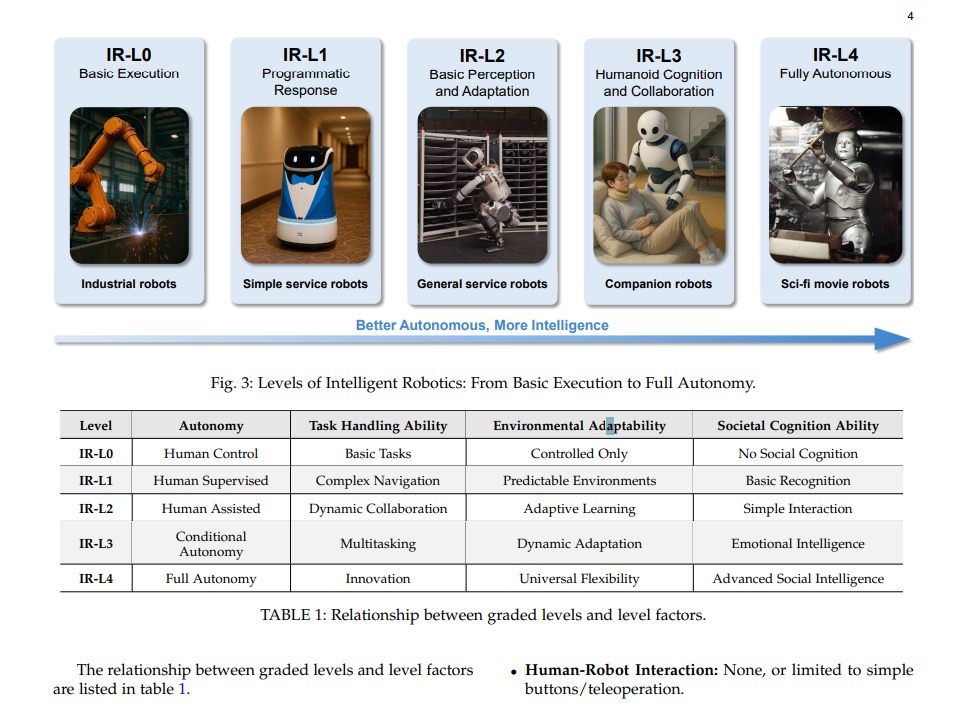
IR-L0:基础执行级别:
特点:完全非智能、程序驱动的属性,专注于执行高度重复、机械化、确定性的任务,如工业焊接和固定路径的物料搬运。完全依赖预定义的程序指令或实时遥操作,缺乏环境感知、状态反馈或自主决策能力。
技术要求:高精度伺服电机和刚性机械结构,基于PLC或MCU的运动控制器;极其有限的感知能力,通常涉及限位开关、编码器等;主要基于预定义脚本、动作序列或遥操作的控制算法,没有实时反馈环路;与人类的交互非常有限,或者仅限于简单的按钮/遥操作。
IR-L1:程序化响应级别:
特点:具有有限的基于规则的反应能力,能够执行预定义的任务序列,如清洁机器人和接待机器人。利用基本传感器(如红外、超声波和压力传感器)触发特定的行为模式。不能处理复杂或不可预见的事件,只能在规则明确的封闭任务环境中表现出操作稳定性。
技术要求:集成了基本传感器(红外、超声波、压力)与适度增强的处理器能力;能够检测障碍物、边界和简单的人类运动;基于规则引擎和有限状态机(FSM),辅以基本的SLAM或随机游走算法。
IR-L2:基础感知与适应性级别:(原先自己做的机器人就是这种)
特点:引入了初步的环境意识和自主能力,能够在动态环境中执行任务,如服务机器人能够根据语音命令执行不同的任务(如“送水”或“导航引导”),同时在路径执行过程中避开障碍物。需要集成感知模块(摄像头、麦克风阵列、激光雷达)和基本的行为决策框架,如有限状态机(FSM)或行为树。
技术要求:多模态传感器阵列(摄像头、激光雷达、麦克风阵列)与增强的计算资源;具备视觉处理、听觉识别和空间定位能力,能够进行基本的对象识别和环境建图;基于有限状态机、行为树、SLAM实现、路径规划和避障系统的控制算法;支持语音识别和合成,能够理解和执行基本命令。
IR-L3:人形认知与协作级别:
特点:在复杂动态环境中表现出自主决策能力,并支持复杂的多模态人机交互。这些系统能够推断用户意图,相应地调整行为,并在既定的伦理约束内运行。例如,在老年护理应用中,IR-L3机器人能够分析语音模式和面部表情,以检测老年人情绪状态的变化,并做出适当的安慰行为或发出紧急警报。
技术要求:高性能计算平台,集成全面的多模态传感器套件(深度摄像头、肌电图传感器、力感测阵列);多模态融合视觉、语音和触觉输入;情感计算用于情绪识别和动态用户建模;基于深度学习架构(CNN、Transformer)的感知和语言理解;用于适应性策略优化的强化学习;用于复杂任务工作流管理的规划和推理模块;嵌入伦理治理系统,以防止不安全或不符合规定的行为。
IR-L4:完全自主级别:
特点:IR-L4代表智能机器人的巅峰,系统在感知、决策和执行方面具有完全的自主性,能够在任何环境中独立运行,无需人类干预。这些机器人具备自我进化的伦理推理能力、高级认知能力、移情能力和长期适应性学习能力。除了处理开放式任务外,它们还能够进行复杂的社交互动,包括多回合自然语言对话、情感理解、文化适应和多智能体协作。
技术要求:高度仿生结构,具有全身多自由度关节;分布式高性能计算平台;全方位、多尺度、多模态传感系统;实时环境建模和意图推断;集成通用人工智能(AGI)框架,包括元学习、生成人工智能和具身智能;自主任务生成和高级推理能力;基于云边端协同的系统;支持自进化的分布式智能体架构;嵌入动态伦理决策系统,约束行为并使道德选择在伦理困境中成为可能。
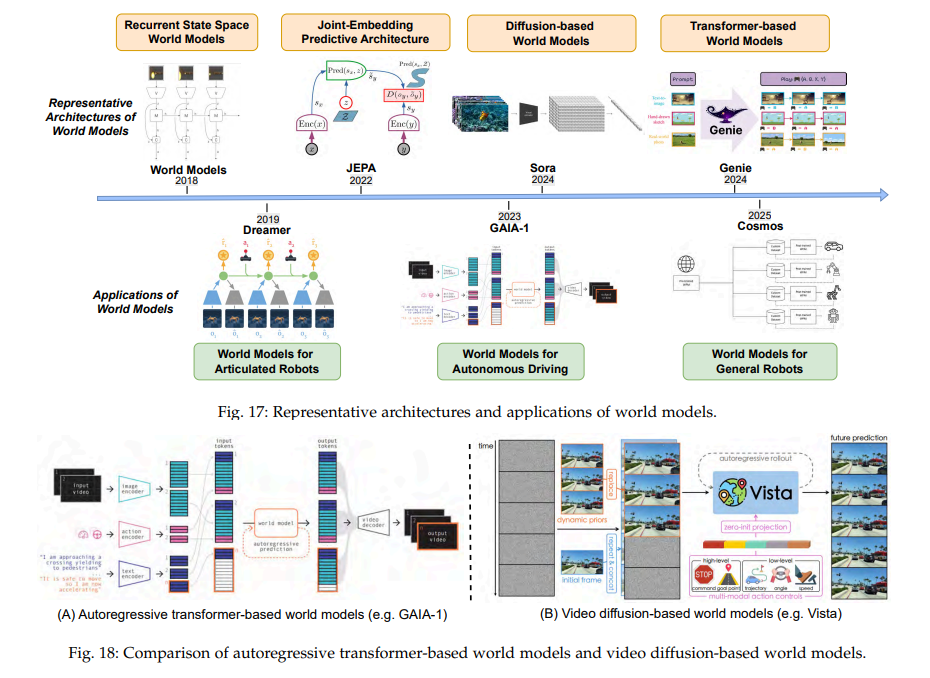
世界模型:
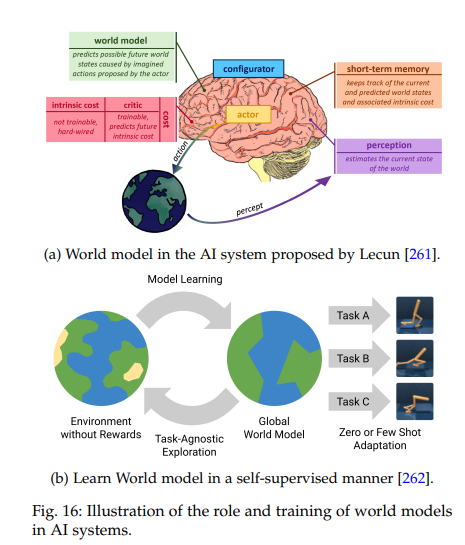
导航世界模型(NWM)采用了条件扩散Transformer(CDiT),基于过去的体验和导航动作预测未来的视觉观察,使智能体能够通过模拟潜在路径并评估其结果来规划导航轨迹。
代表性架构: