ROS 2 机器人开发$2
1.编写第一个节点
(1)编写第一个节点
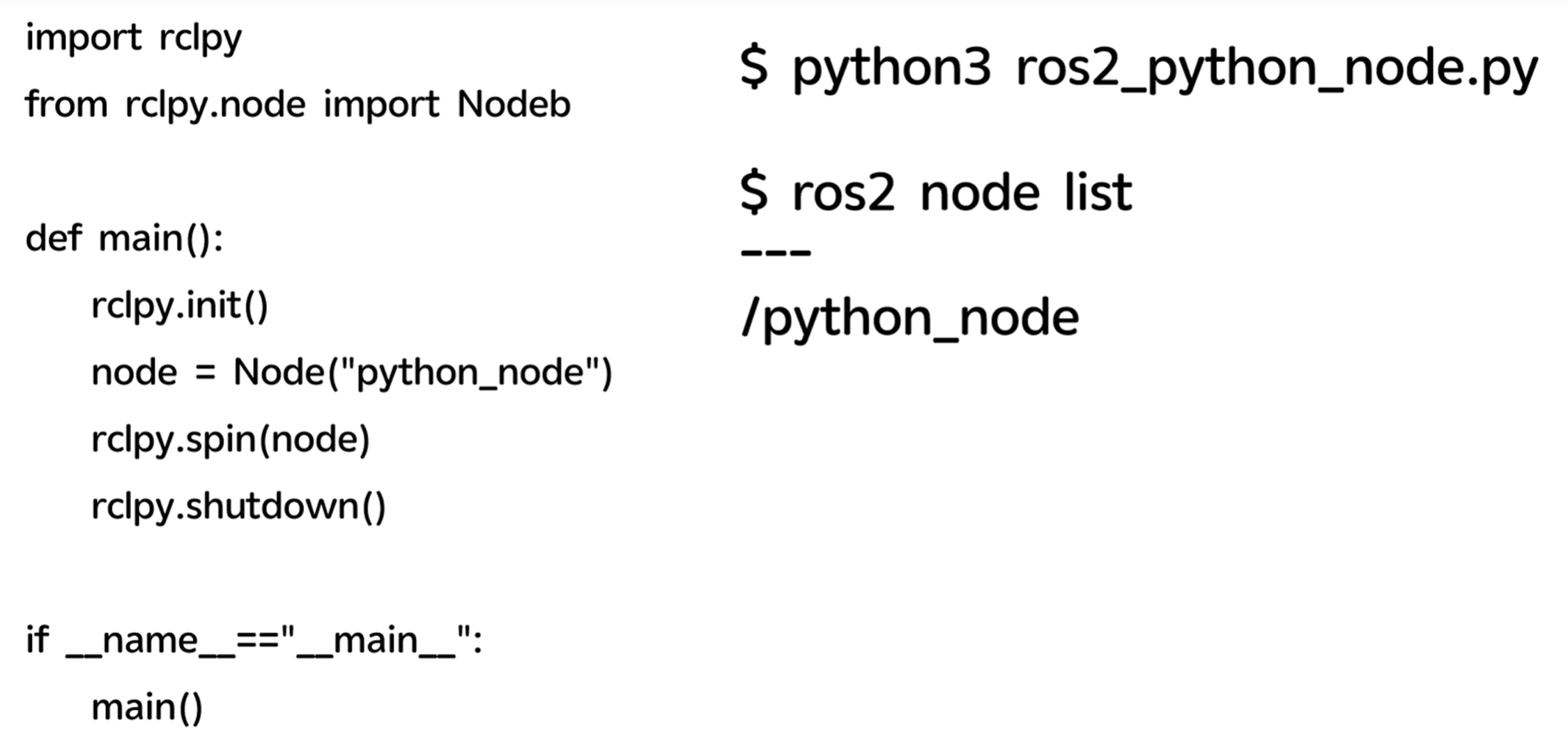
(2)日志打印:
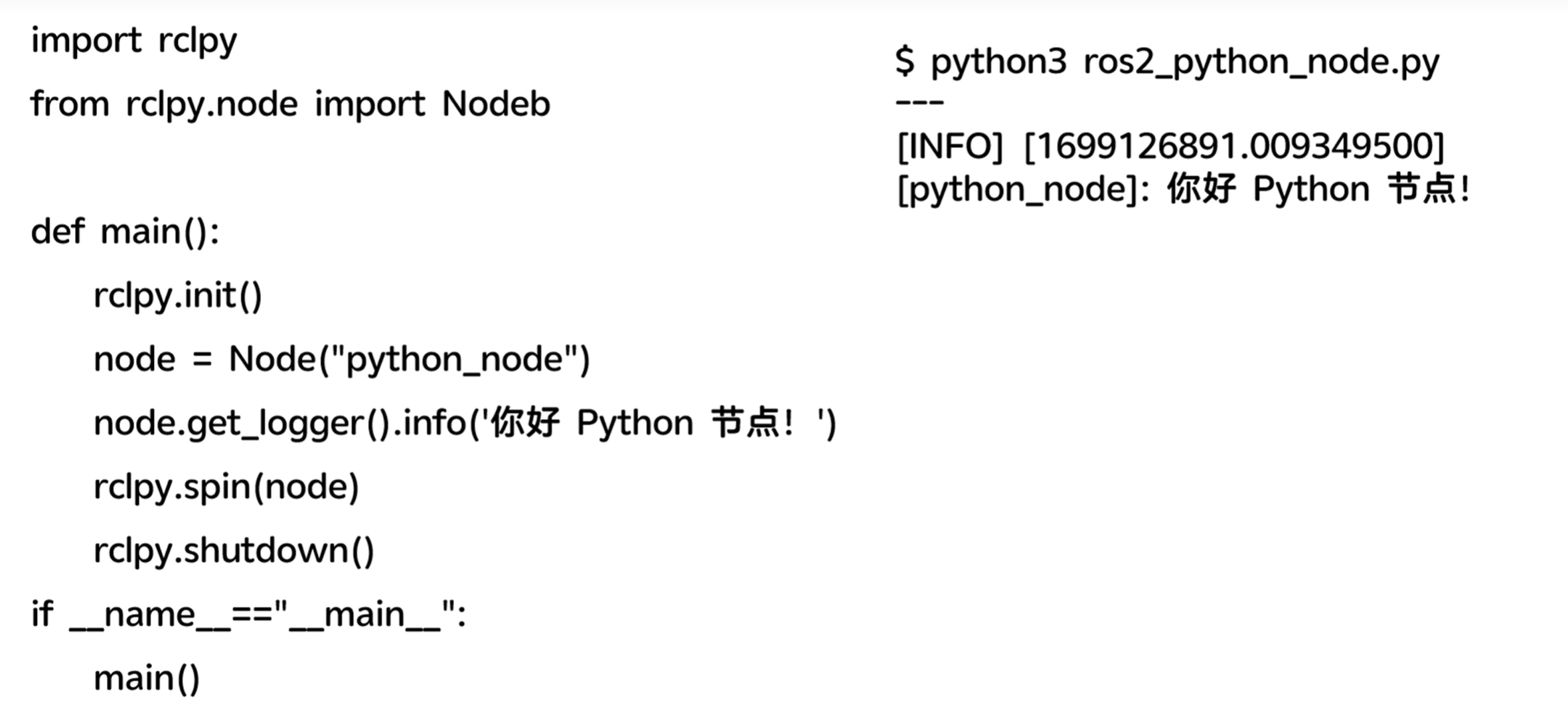
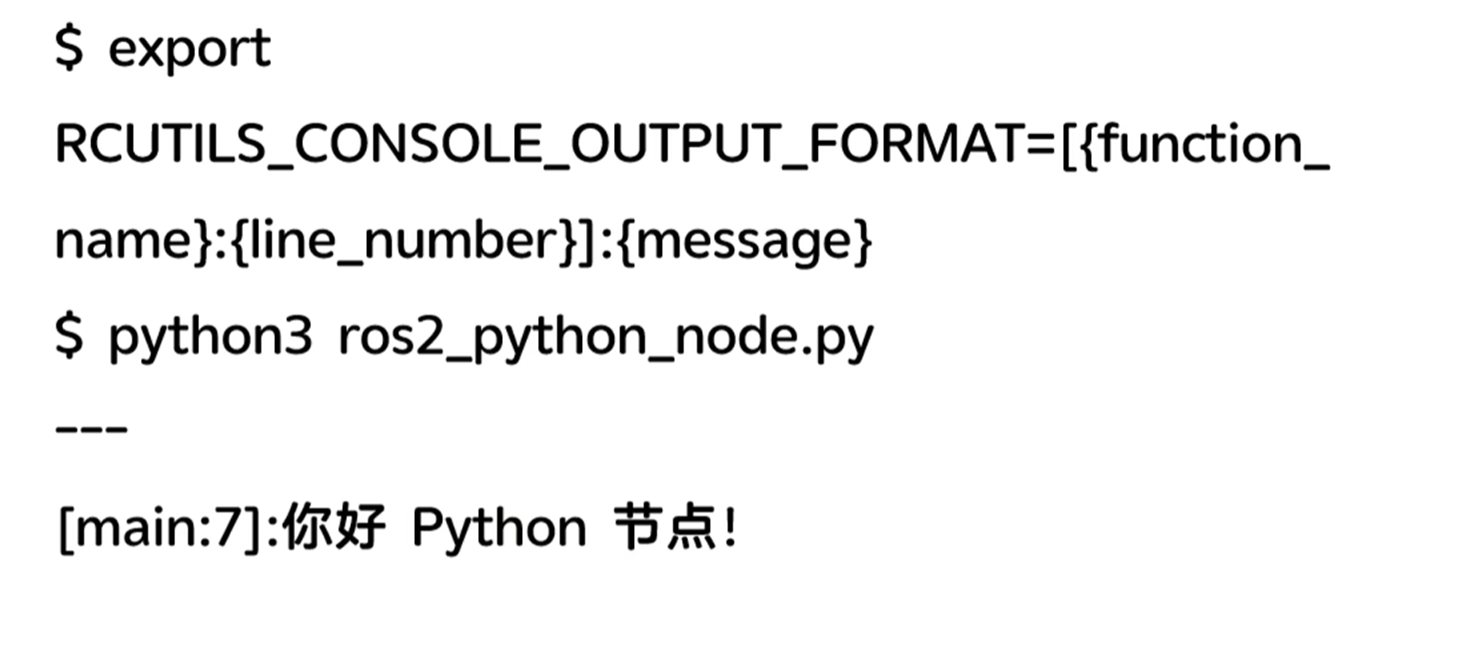
(3)环境变量修改日志:
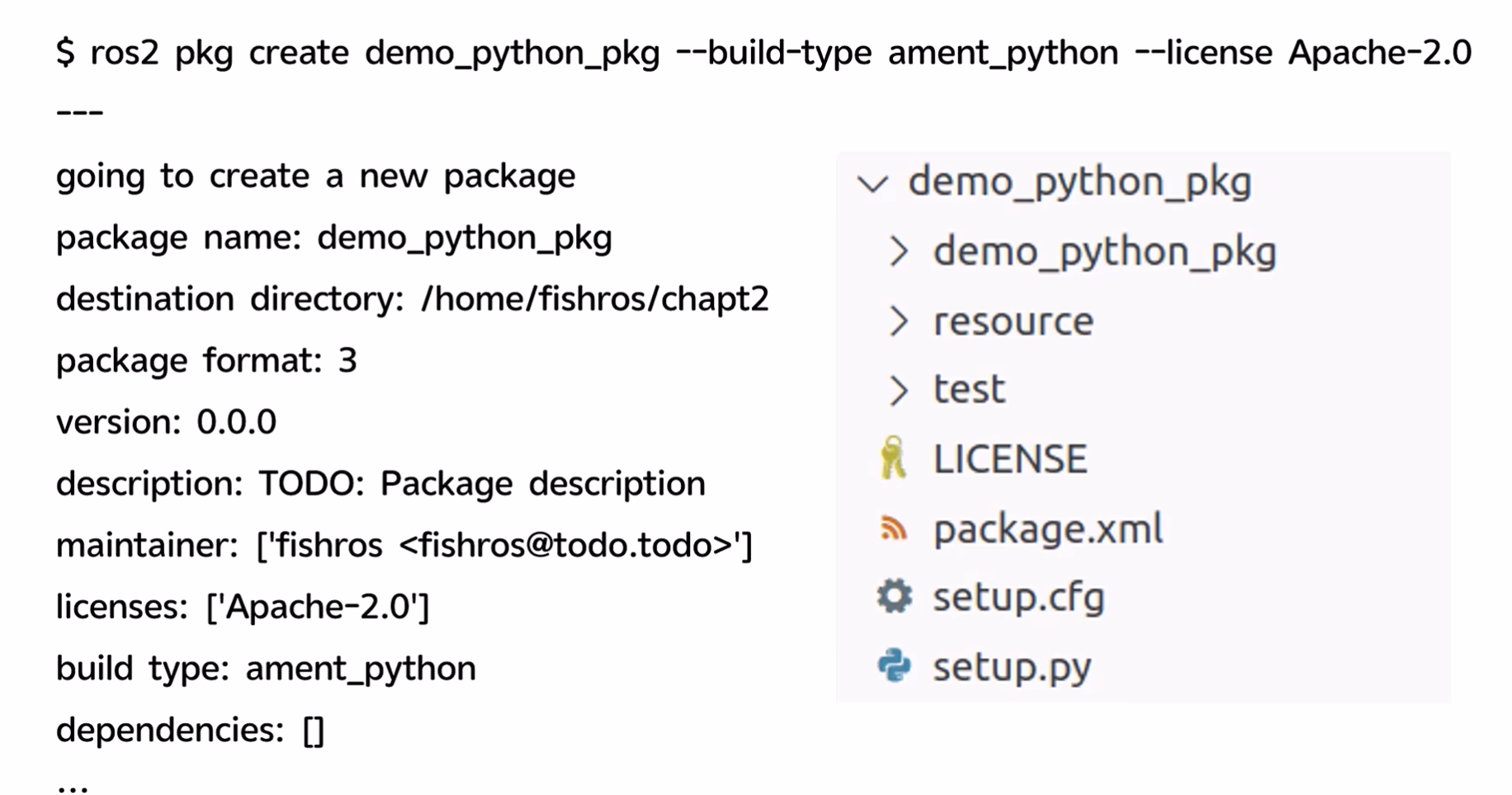
 2.使用功能包组织python节点
2.使用功能包组织python节点
(1)创建
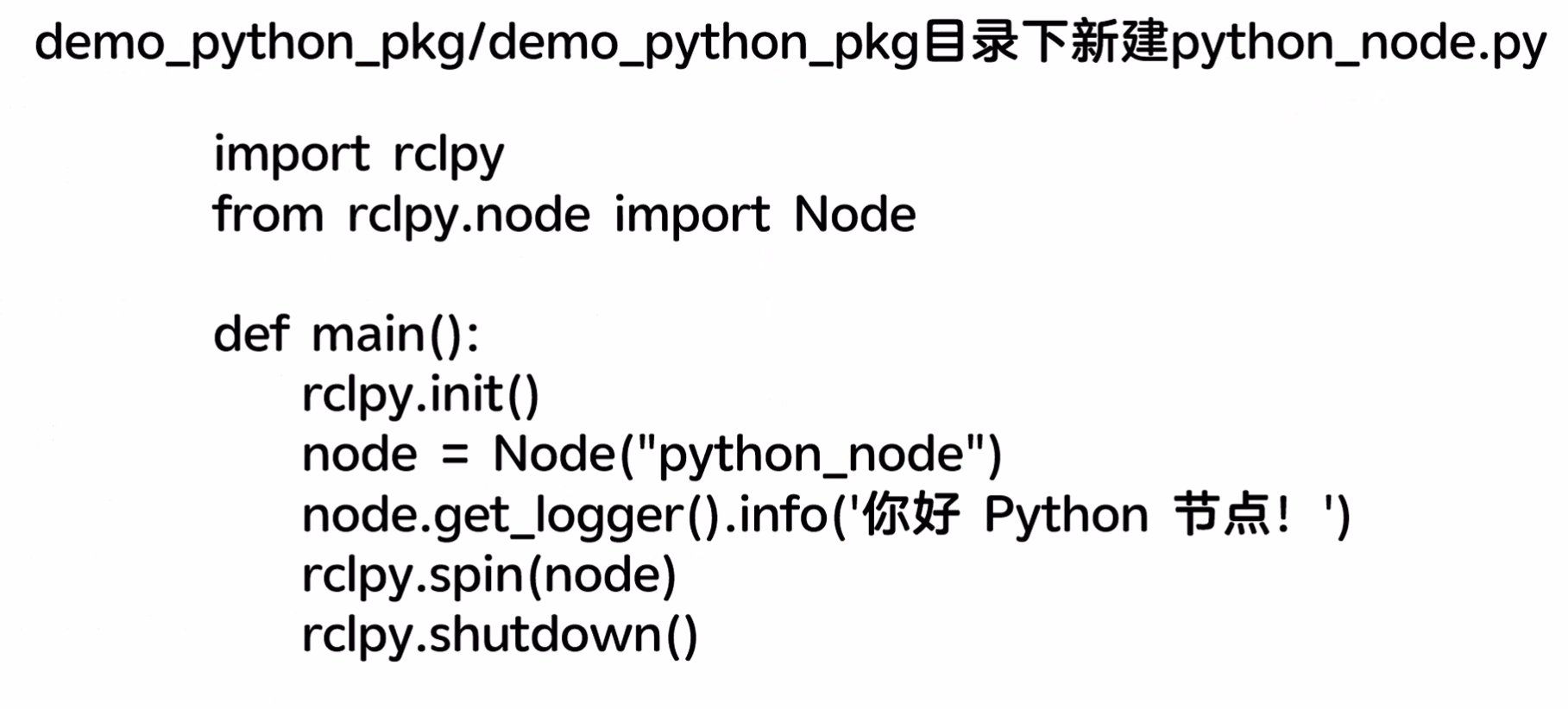
(2)代码
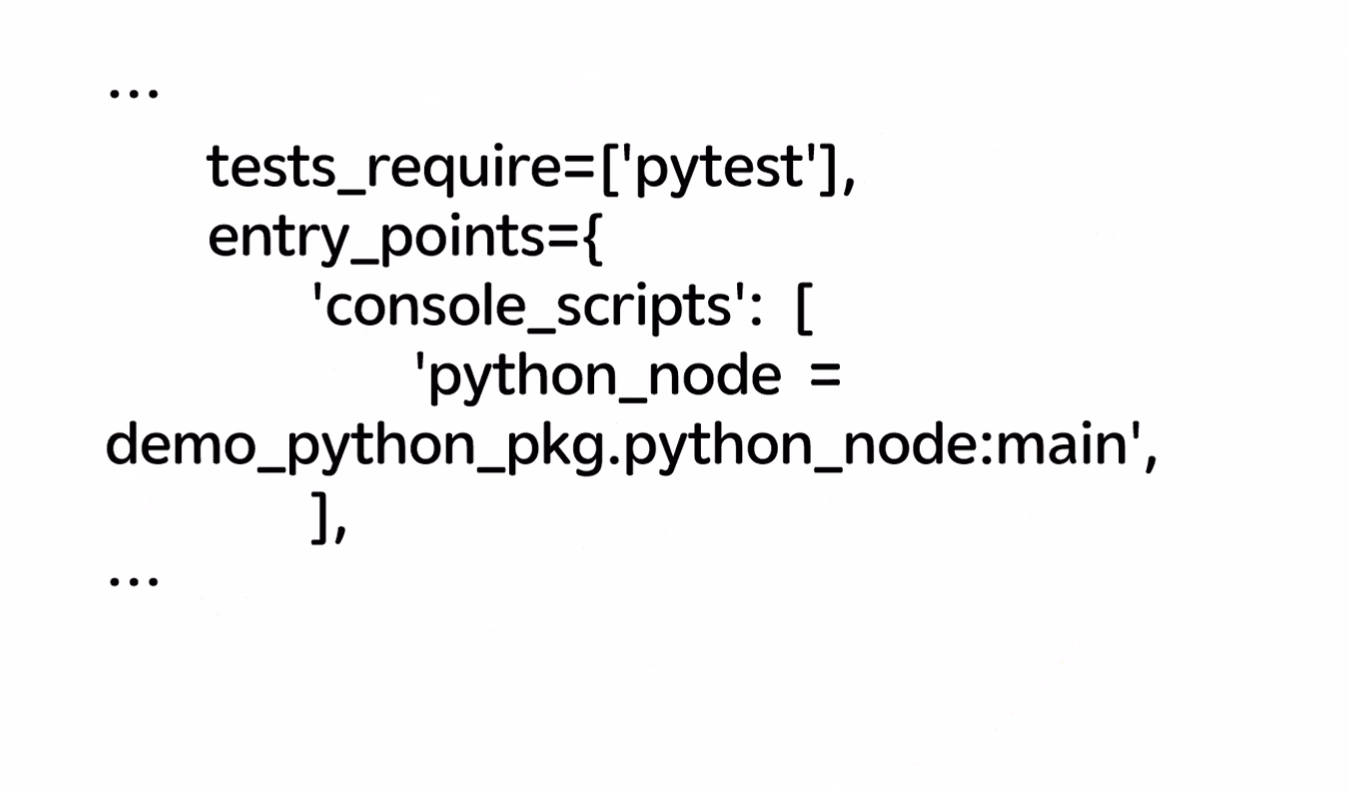
(3)注册
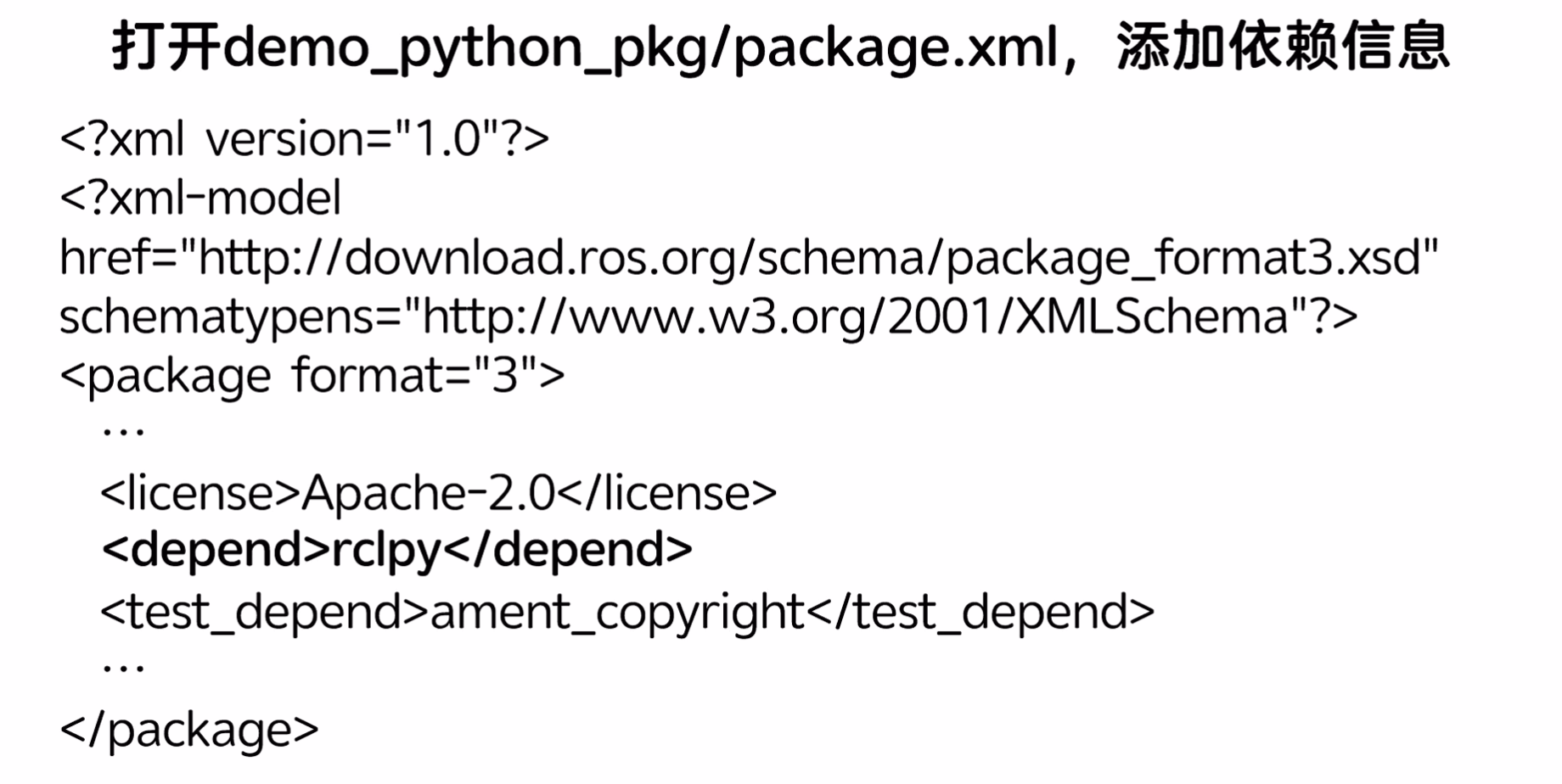
(4)声明
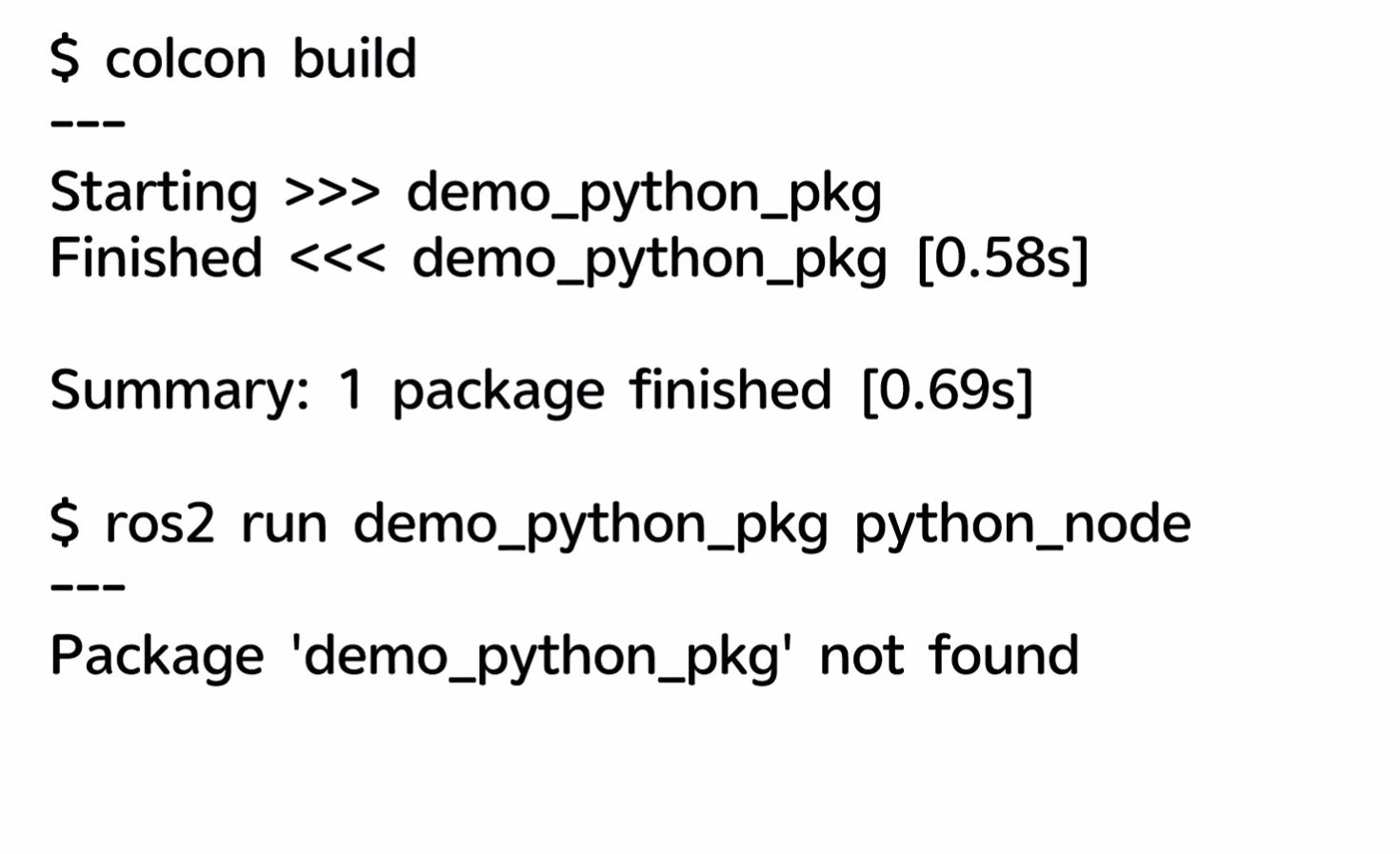
(5)构建
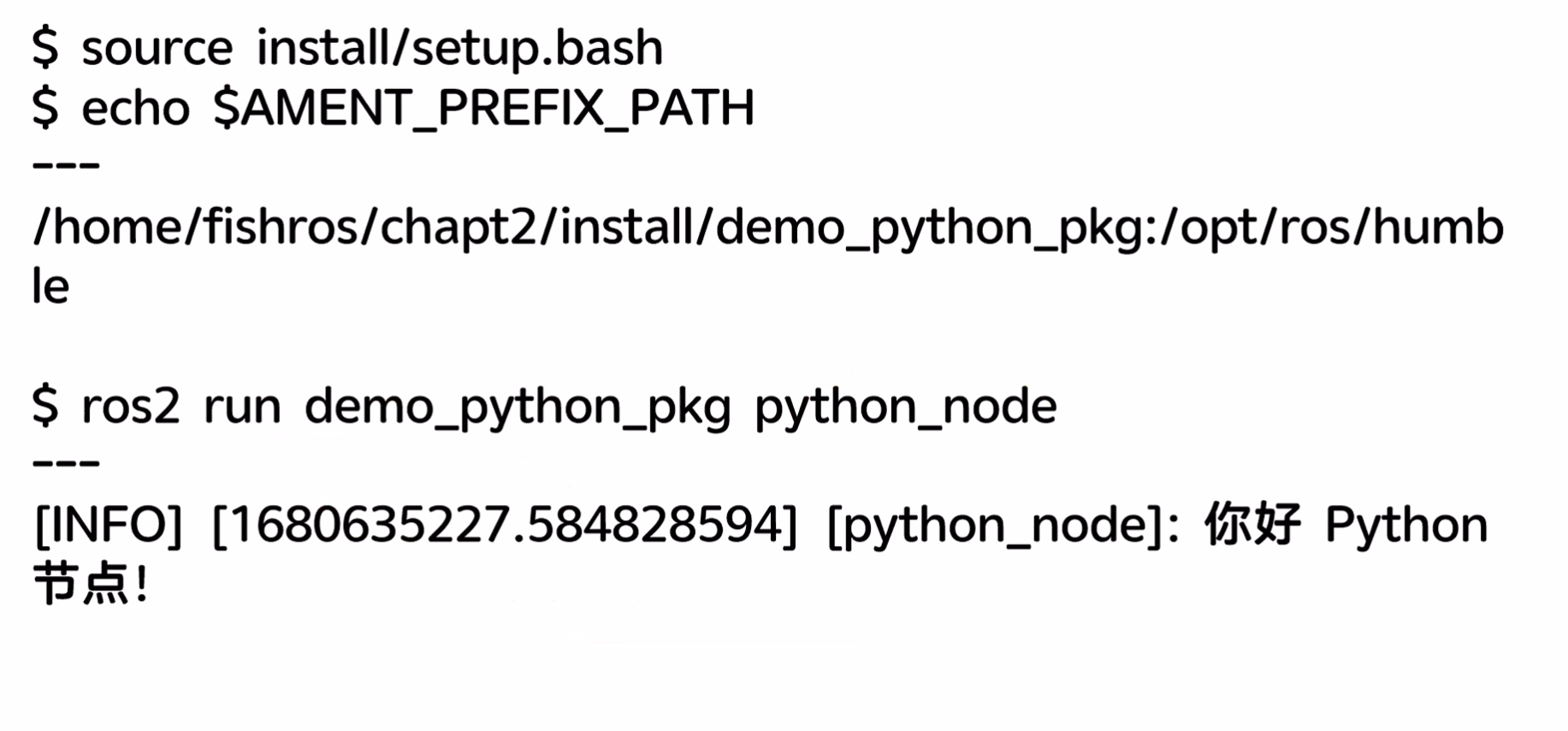
(6)source
3.多功能包的最佳实践workspace
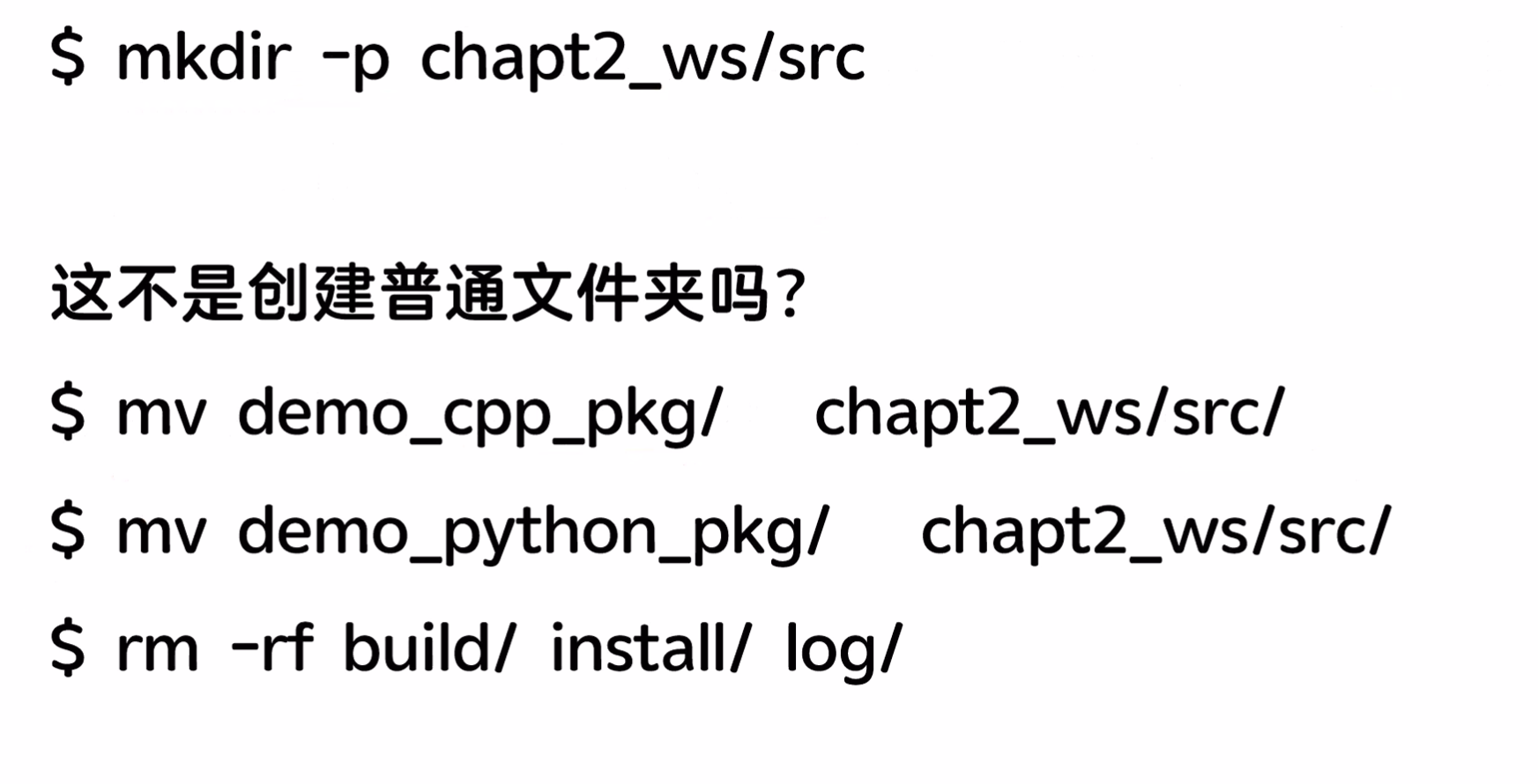
(1)创建工作空间(其实也就是一个文件夹)
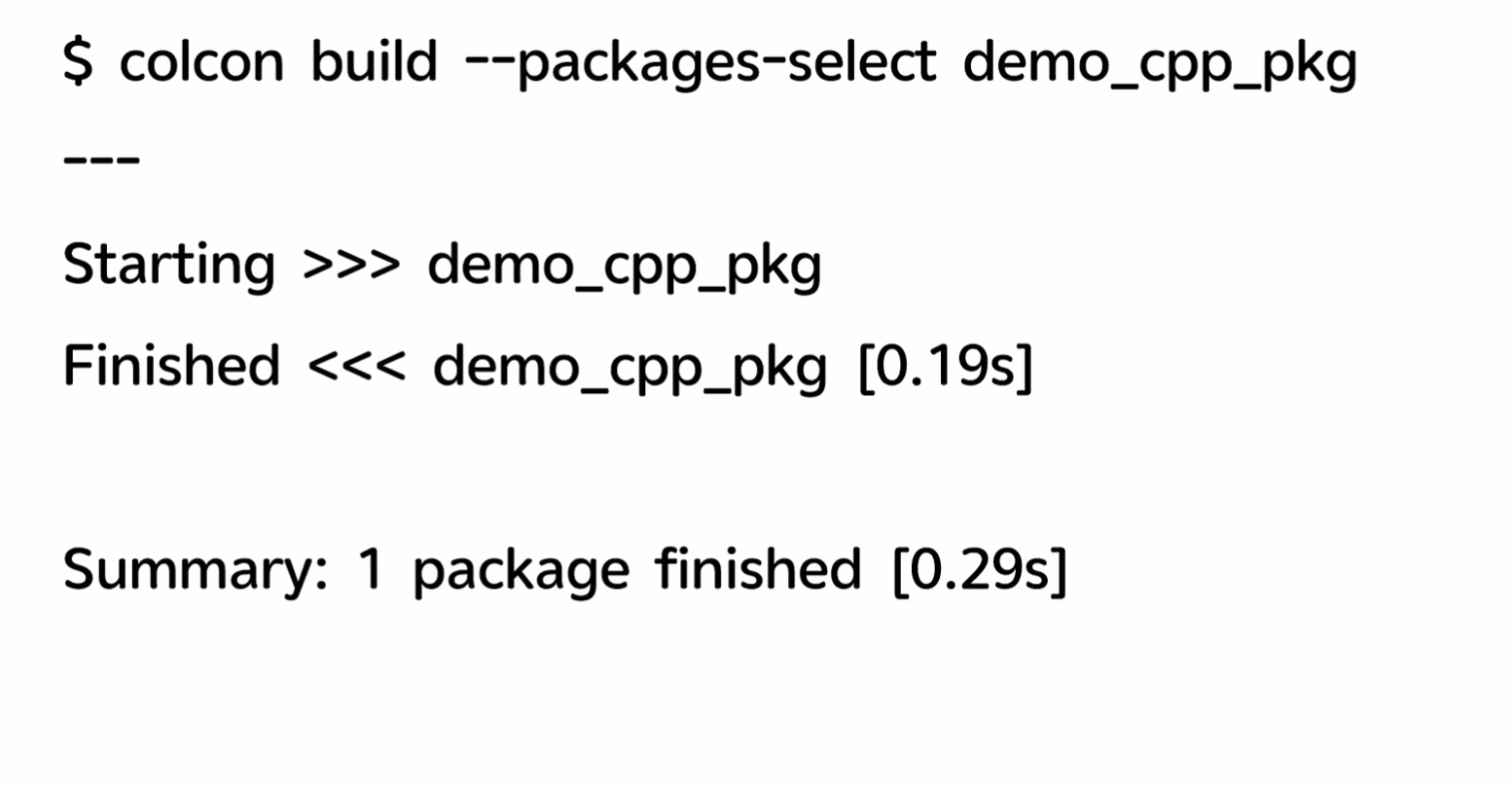
 (2)构建工作空间下单独功能包
(2)构建工作空间下单独功能包
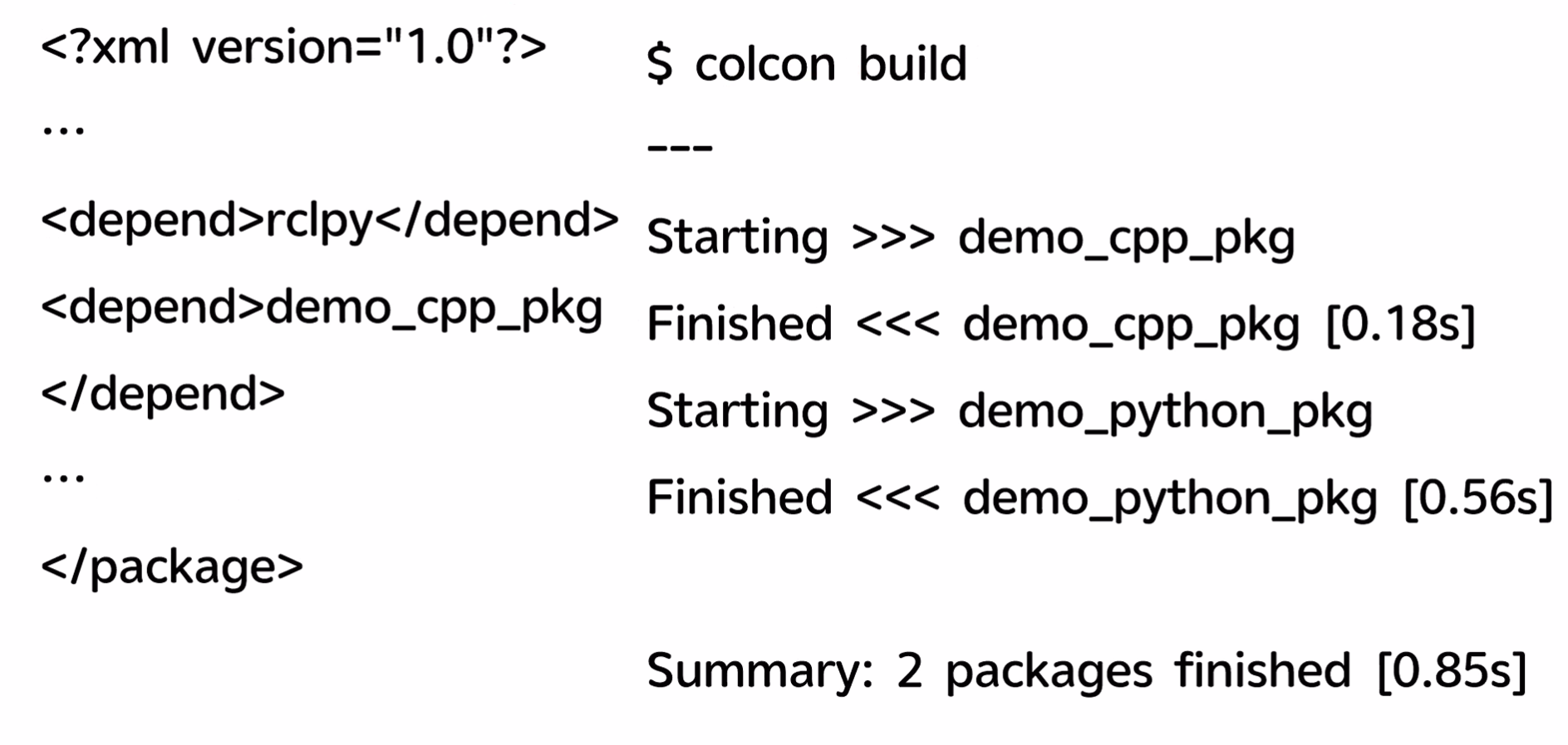
(3)构建工作空间下的功能包依赖情况
4.面向对象编程
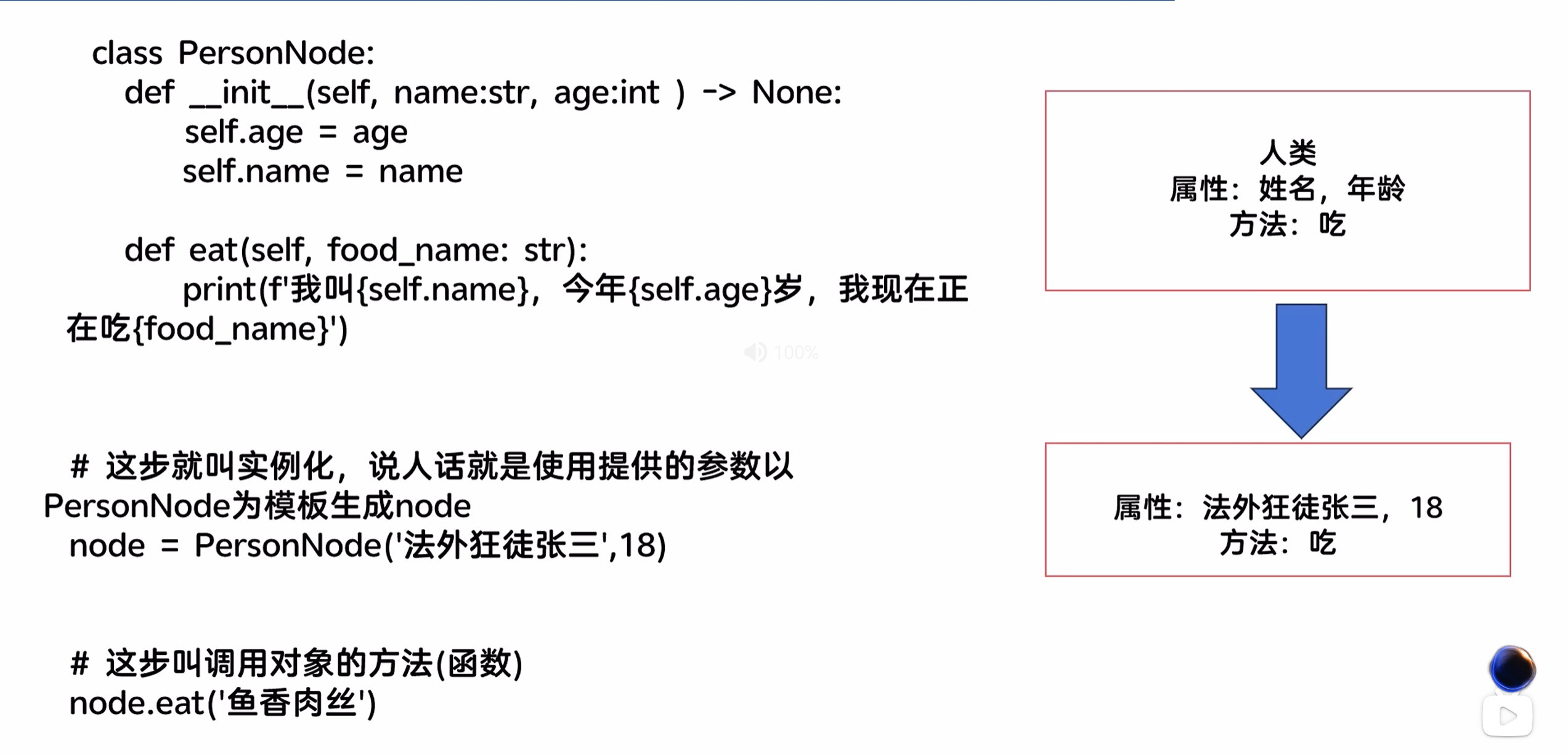
class PersonNode:
def __init__(self,name_value:str,age_value:int) -> None:
self.name =name_value
self.age = age_value
def eat(self,food_name:str):
"""
fangfa:chidongxi
:food_name shiwumingzi
"""
print(f"{self.name},{self.age}sui,aichi{food_name}")
def main():
node =PersonNode("1234",18)
node.eat('yuxiangrousi')
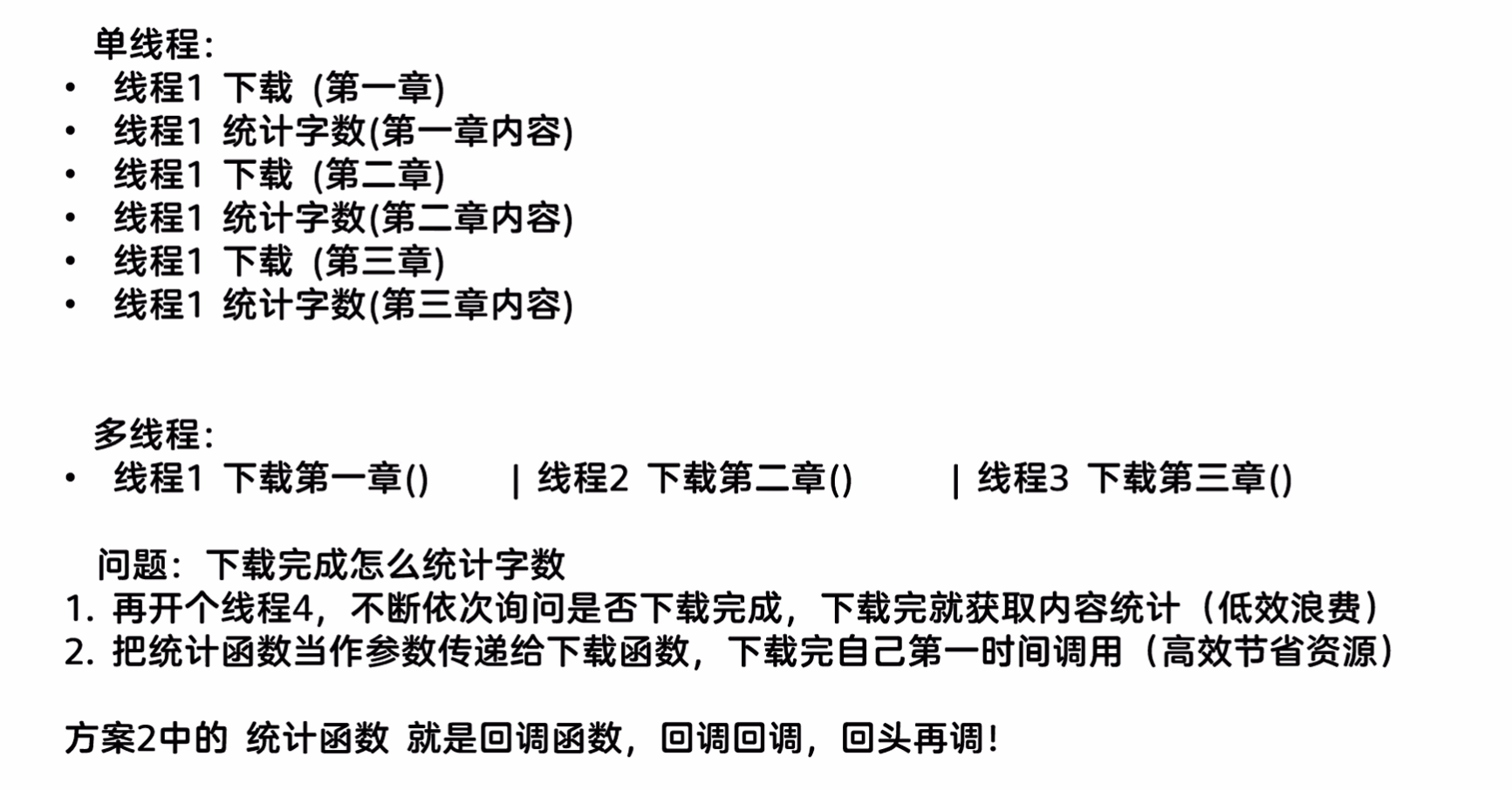
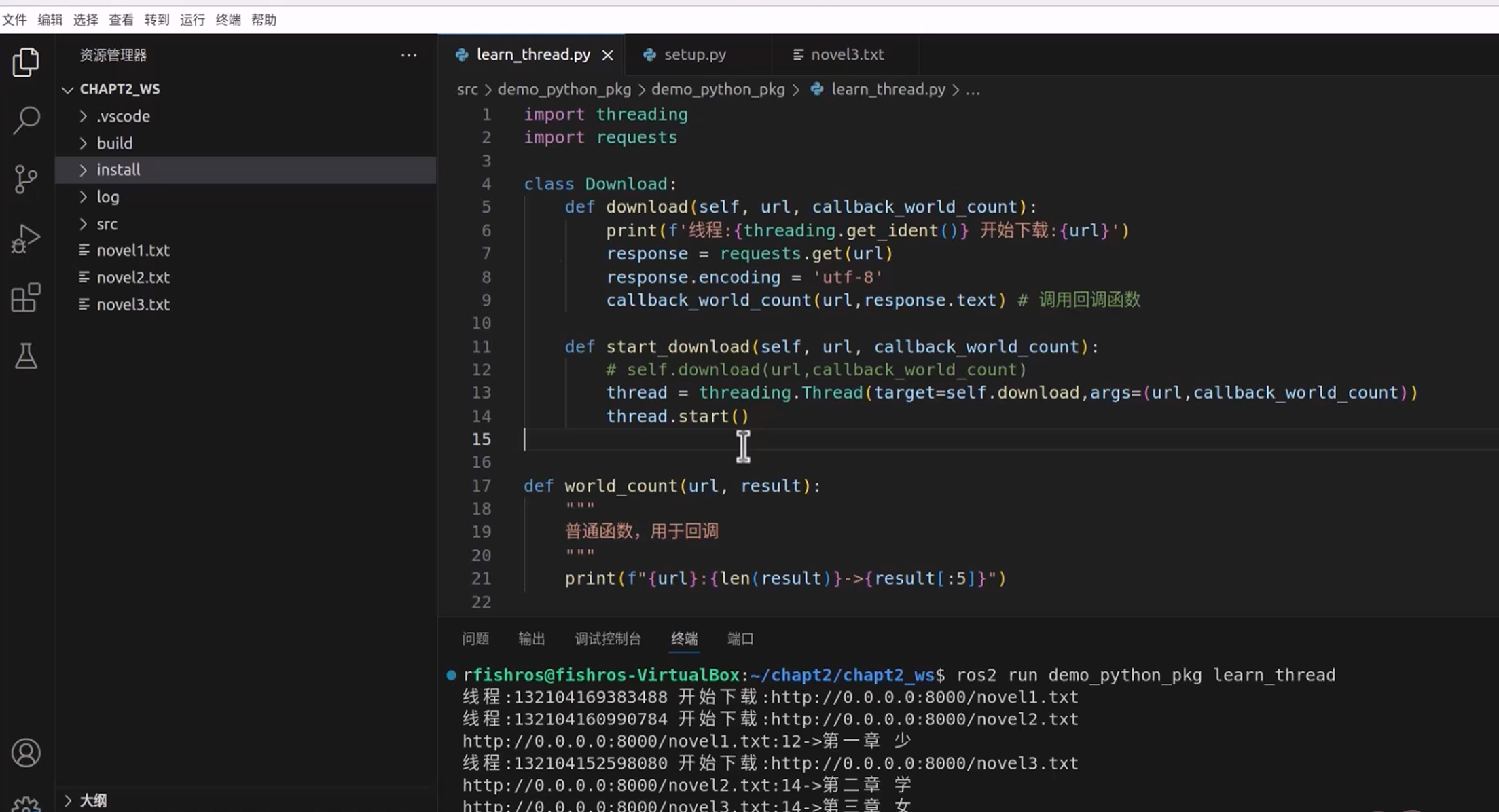
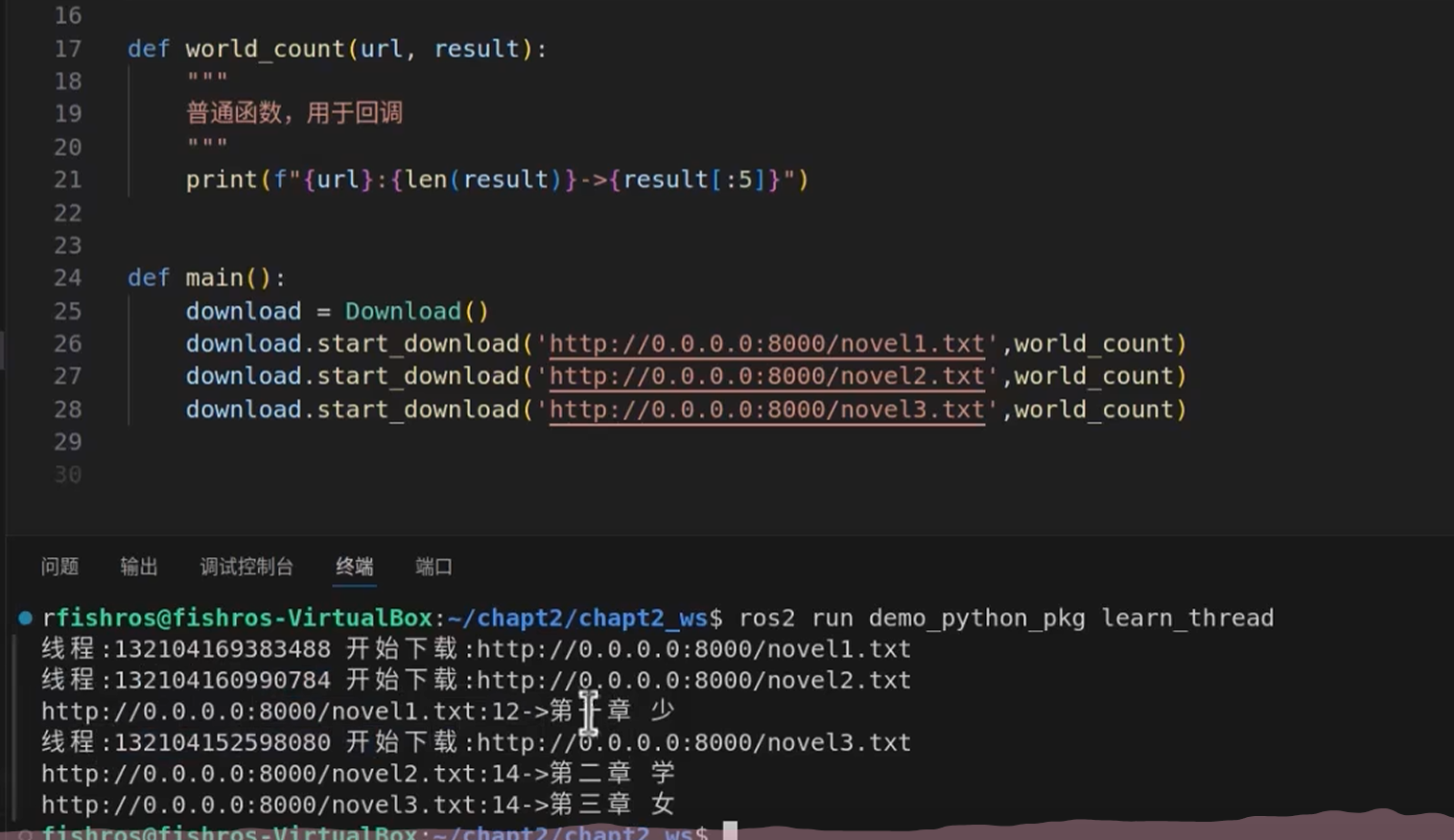
5.多线程与回调函数