一天认识一个神经网络之--CNN卷积神经网络
CNN 是一种非常强大的深度学习模型,尤其擅长处理像图片这样的网格结构数据。你可以把它想象成一个系统,它能像我们的大脑一样,自动从图片中学习并识别出各种特征,比如边缘、角落、纹理,甚至是更复杂的物体部分(比如眼睛或者车轮)。
CNN如何看图?
可以把CNN“看”图的过程想象成一个侦探在分析一张照片
寻找基础线索 (Detecting Basic Features): 最开始,CNN就像一个拿着放大镜 🔎 的侦探。它不会立刻去看整张图,而是逐个小区域地扫描,寻找最基础的线索,比如边缘、角落、颜色变化等。这些是构成任何图像最基本的元素。
组合线索 (Combining Features): 接下来,CNN会把上一步找到的基础线索组合起来。比如,它可能会发现“一条曲线”和“另一条曲线”经常一起出现,构成了一个“圆形”的图案;或者某些线条组合起来像一种“纹理”。
形成整体概念 (Recognizing Objects): 更深一层的CNN会把这些组合好的图案(比如圆形、纹理)进一步组装成更复杂的概念。它会学习到,“一个圆形”加上“两个倒三角形”可能就代表了一张“猫脸” 🐈。
最终判断 (Classification): 最后,在收集了所有这些从简单到复杂的证据之后,CNN会综合所有信息,给出一个最终的判断:“根据我看到的所有特征,我95%确定这是一张猫的图片。”

卷积层 (Convolutional Layer)
卷积层工作方式可以分为三个关键部分:
滤波器/核 (Filter / Kernel): 这就是“放大镜”的镜片。它其实是一个很小的数字矩阵(比如 3x3 大小),被设计用来识别一个特定的微小特征。例如,会有一个专门用来找“垂直边缘”的滤波器,一个专门找“水平边缘”的滤波器,还有一个可能专门找“绿色”的滤波器。
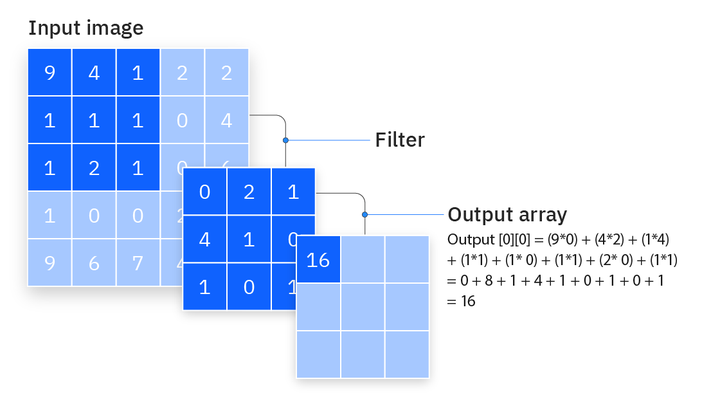
滑动计算 (Convolution): CNN会拿着这个滤波器,在原始图片的左上角盖住一小块区域。它将滤镜上的数字与图片上对应位置的像素值相乘再相加,得到一个新的数字。然后,它就像移动窗户一样,将滤镜向右滑动一格,重复计算,再向右……直到扫完整张图片。
特征图 (Feature Map): 每当滤波器在一个区域发现它要找的特征时(比如,“垂直边缘”滤镜找到了一个垂直边缘),计算出的那个新数字就会很大。反之,如果没找到,数字就很小。所有这些新数字组合在一起,就形成了一张新的“图”,我们称之为特征图。这张图就像一张“证据地图”,清晰地标示出了原始图片中哪里有我们想找的那个特定特征。
假设我们有一张 5×5 的灰度图像,可以想成是一个 5×5 的矩阵,每个元素代表像素值。
我们再有一个 3×3 的卷积核(kernel/filter),也就是一个 3×3 的小矩阵。
卷积的步骤:
把这个 3×3 核心,放在图像左上角的 3×3 区域。
对应元素相乘,再求和 → 得到一个数。
把核往右挪一个像素(stride=1),重复上面过程。
一直滑动,直到整张图都“扫描”完。
最终得到的,不再是 5×5,而是一个更小的矩阵(这里会是 3×3,我们马上会推导)。
为什么会变小?
规律是这样的: 如果输入大小是 N×N,卷积核大小是 K×K,stride=1,不加 padding, 输出大小就是:
(N−K+1)×(N−K+1)
套到刚才的例子: 输入 = 5×5 卷积核 = 3×3 → 输出 = (5 - 3 + 1) × (5 - 3 + 1) = 3 × 3
多通道卷积是怎么计算的?
刚才的例子,我们是从单通道的灰度图像举例的。
对于灰度图:
输入是一张 5×5 矩阵(单通道)。
卷积核是 3×3,结果也是一个矩阵。
但是,在实际运用中,输入往往是RGB三通道的彩色图像:
输入大小=3×H×W (3 表示通道数:红、绿、蓝)。
多通道卷积的关键:
每个卷积核的大小是 input_channels×k×k。
例如输入有 3 个通道,卷积核大小为3*3,卷积核就是 3×3×3。
卷积时,每个通道单独卷积,得到 3 个结果矩阵,然后把它们相加 → 得到一个最终的特征图。
每个卷积核都会生成 1 张特征图。
有多少个卷积核,就会输出多少个通道。
👉 举个例子:
输入:大小 3×32×32(一张 RGB 小图)。
卷积层:
nn.Conv2d(in_channels=3, out_channels=8, kernel_size=3)。结果:输出 8×30×30。
(8 表示我们学到了 8 个特征图,每个是 30×30)。
相信大家都想到了一个核心问题: 同一个卷积核在不同通道上是不是一样的?
答案: 不是一样的。
对于一个3*3*3的卷积核为例:
每一个通道上的核的权重是不一致的,也就是说,一共有三个不同权重的大小为3*3的核。分别对应输入的 3 个通道。
卷积时,不同的核和对应通道做卷积 → 得到 3 张中间结果。
然后把这 3 张结果逐元素相加 → 得到最终的 1 张输出特征图。
如何设计卷积核?
但在CNN中,这些Filter的值是网络自己学习到的。
这个过程是这样的:
1. 随机初始化 (Random Initialization): 在训练开始之前,我们根本不知道哪些Filter是最好的。所以,我们就用一堆随机的、很小的数字来填充所有的Filter。在这一阶段,这些Filter是“无知”的,它们提取出的特征图也基本是无意义的噪声。
2. 前向传播与计算误差 (Forward Pass & Calculate Error): 我们给网络看一张图片,比如一张猫的图片,并且告诉它“这是一只猫”。网络会用它那些随机的Filter去处理这张图,经过一系列计算后,它会给出一个预测。因为Filter是随机的,它的第一次预测很可能错得离谱,比如它可能会说:“我有10%的把握这是猫,90%的把握这是狗”。 然后,我们将这个离谱的预测和正确答案(100%是猫)进行比较,计算出一个“误差”或“损失”(Loss)。这个误差值衡量了网络这次“错得有多严重”。
3. 反向传播与更新Filter (Backpropagation & Update Filters): 这是最关键的一步。网络会使用一个叫做反向传播 (Backpropagation) 的算法,像一个侦探一样,从最终的误差开始,一层一层地往回追溯,计算出网络中每一个数字(包括所有Filter里的数值)对这个最终的误差“贡献”了多少。 对于那些导致错误判断的Filter数值,算法会稍微调整它们,让它们朝着能减少误差的方向改变一点点。这个调整的过程通常使用一种叫做梯度下降 (Gradient Descent) 的优化方法。
4. 重复,重复,再重复: 网络会不断地重复以上过程:看一张图 -> 预测 -> 计算误差 -> 反向传播更新Filter。当我们把成千上万张猫和狗的图片都给它看过之后,神奇的事情就发生了:
第一层的Filter为了能有效区分猫和狗,会“自发地”学习到应该去检测一些最基础的特征,比如边缘、角落和颜色块,因为这些是所有物体共有的基础元素。
更深层的Filter则会学习如何组合这些基础特征,形成更复杂的纹理、形状,比如眼睛、耳朵的轮廓等。
总结一下:我们不设计Filter,我们只为网络设定一个目标(比如,正确分类图片),然后给它提供大量的数据和反馈(误差),网络就会在一次次的“试错”和“修正”中,自动学习出最优的Filter组合。
这个自动学习特征的能力,是CNN如此强大的根本原因。
池化层 (Pooling Layer)
在我们刚刚讨论的卷积层之后,我们得到了一堆“证据地图”(特征图)。这些图可能非常大,而且包含了很多冗余信息。
池化层的目的就很直接:对这些特征图进行“压缩提炼”,去粗取精。
它主要做两件事:
减小尺寸 (Downsampling): 大大减小特征图的尺寸,这样可以显著减少后续计算的负担,让网络运行得更快。
保持重要特征 (Feature Invariance): 保留每个小区域内最显著的特征,同时忽略一些不那么重要的细节。这让网络具有一定的“不变性”——即使图片中的物体有轻微的平移或形变,网络依然能够认出它。
最常用的一种池化方法叫做最大池化 (Max Pooling)。它的工作方式非常简单:
划定区域: 像卷积一样,它也用一个小窗口(通常是 2x2 大小)来扫描特征图。
取最大值: 在这个 2x2 的窗口覆盖的4个像素中,它只保留数值最大的那一个,把其他的都丢掉。
滑动窗口: 然后,它将窗口移动到下一个区域(通常步长为2,也就是不重叠地移动),重复这个过程,直到扫完整张图。
举个例子:
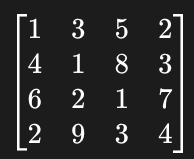
假设我们有下面这个 4x4 的特征图,我们要用一个 2x2 的最大池化窗口来处理它。
添加图片注释,不超过 140 字(可选)
左上角 2x2 区域: [[1, 3], [4, 1]],最大值是 4。
右上角 2x2 区域: [[5, 2], [8, 3]],最大值是 8。
左下角 2x2 区域: [[6, 2], [2, 9]],最大值是 9。
右下角 2x2 区域: [[1, 7], [3, 4]],最大值是 7。
经过最大池化后,原来 4x4 的特征图就被压缩成了一个 2x2 的新特征图,只留下了每个区域最强的“信号”:
[4,9;8,7]
你看,尺寸大大减小了,但每个区域最关键的特征信息(那个最亮的点)被保留了下来。
到目前为止,我们已经了解了CNN的核心特征提取部分:
输入图片 -> [卷积层 -> 池化层] -> [卷积层 -> 池化层] -> ... -> 高度提炼的特征图
这个 [卷积 + 池化] 的组合可以重复多次,层数越深,提取的特征就越抽象、越高级。
在完成了所有这些特征提取之后,网络需要根据这些最终的特征图,做出最后的判断。
这里就要介绍全连接层 (Fully Connected Layer) 了。
全连接层 (Fully Connected Layer)
到目前为止,我们的CNN已经通过一系列的卷积和池化层,将原始图片转换成了一组高度提炼的特征图。这些特征图代表了图片中是否存在某些高级特征(比如“耳朵”、“眼睛”的轮廓等)。
但是,这些特征还是一些二维的“地图”,网络还不能直接用它们来做判断。全连接层的作用就是汇总所有证据,做出最终裁决。
这个过程分为两步:
1. 压平 (Flatten)
在进入全连接层之前,我们需要做一个简单的准备工作:压平 (Flatten)。
想象一下,我们把上一层输出的所有二维特征图,一个接一个地首尾相连,拉成一条长长的一维向量。
这个长向量就包含了图片中所有被检测到的高级特征的“清单”。
2. 全连接计算 (The Fully Connected Layers)
这个压平后的长向量,会被输入到一个或多个全连接层中。
“全连接”这个名字非常形象:
在这一层里,每一个神经元都和前一层的所有神经元(也就是那个长向量里的每一个值)相连接。
它的工作方式就像一个传统的神经网络。它会学习如何根据这个特征“清单”中的不同组合来进行打分。
继续用我们的侦探比喻:
卷积/池化层是负责搜集证据的侦探们,他们提交了各自的报告(特征图),说“我在这里发现了爪印”、“我在这里发现了胡须的纹理”。
压平操作就是把所有这些报告整理成一个大档案。
全连接层就是首席侦探,他会阅读整个档案,并根据所有证据的权重进行综合分析:“嗯... 既有胡须,又有尖耳朵,还有猫科动物的眼睛轮廓... 综合来看,这些特征组合在一起,指向‘猫’的可能性非常高。”
输出层 (Output Layer)
通常,最后一个全连接层的神经元数量,和我们要分类的类别数量是相等的。
比如,做一个猫狗二分类任务,最后就有2个神经元。
比如,做一个0-9的手写数字识别,最后就有10个神经元。
最后,我们通常会在这之上再加一个 Softmax 函数,它能将每个类别的最终得分,转换成一个概率值(所有概率加起来等于1)。这样,网络输出的就不是[猫得分: 2.8, 狗得分: 0.1],而是更加直观的[猫的概率: 95%, 狗的概率: 5%]。
计算实例拆解全连接层
我们假设,经过了最后的卷积和池化层,再通过“压平”操作,我们得到了一个长度为4的特征向量。这在真实网络中会非常长(可能有几千个元素),但我们用一个短的来演示计算:
输入向量 (Input Vector): [2, 1, 3, 5]
这个向量可以理解为网络的“证据清单”:
第1个值 2:代表网络检测到的“尖耳朵”特征的强度。
第2个值 1:代表“胡须”特征的强度。
第3个值 3:代表“圆眼睛”特征的强度。
第4个值 5:代表“毛茸茸纹理”特征的强度。
现在,我们想把这个包含4个特征的向量,输入到一个拥有3个神经元的全连接层。我们的目标是,让这3个神经元分别对“猫”、“狗”、“其他”这三个类别打分。
一个全连接层包含两个需要学习的部分:权重 (Weights) 和 偏置 (Biases)。
1. 权重 (Weights)
每个神经元都会对每一个输入特征分配一个权重。这个权重代表了该神经元有多“看重”这个输入特征。
一个大的正权重意味着:“如果这个特征很强,那么我就应该给出更高的分”。
一个大的负权重意味着:“如果这个特征很强,那么我就应该给出更低的分”。
因为我们有4个输入特征和3个神经元,所以我们会有一个 3x4 的权重矩阵:
Weights=

添加图片注释,不超过 140 字(可选)
第一行是“猫”神经元的权重:它对所有特征都给了较高的正权重,因为它认为这些特征都和猫有关。
第二行是“狗”神经元的权重:它对“尖耳朵”和“圆眼睛”给了负权重(可能它认为狗的耳朵和眼睛是另一种形状)。
第三行是“其他”神经元的权重。
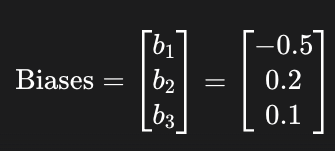
2. 偏置 (Biases)
每个神经元还有一个独立的偏置项。你可以把它理解为一个“基础分”或者“激活阈值”,它不受任何输入的影响。我们有3个神经元,所以有3个偏置值:
Biases=
添加图片注释,不超过 140 字(可选)
计算过程
现在我们来计算每个神经元的输出分数。计算方法是:将输入向量与该神经元的权重向量做点积,然后加上偏置。
神经元1 (“猫”的分数):
Score猫=(Inputs⋅Weights猫)+Bias猫
=(2×0.8+1×0.7+3×0.9+5×0.6)+(−0.5)
=(1.6+0.7+2.7+3.0)−0.5
=8.0−0.5=7.5
神经元2 (“狗”的分数):
Score狗=(Inputs⋅Weights狗)+Bias狗
=(2×−0.5+1×0.4+3×−0.8+5×0.2)+(0.2)
=(−1.0+0.4−2.4+1.0)+0.2
=−2.0+0.2=−1.8
神经元3 (“其他”的分数):
Score其他=(Inputs⋅Weights其他)+Bias其他
=(2×0.1+1×−0.2+3×0.3+5×−0.4)+(0.1)
=(0.2−0.2+0.9−2.0)+0.1
=−1.1+0.1=−1.0
最终结果
经过这个全连接层的计算,我们得到的最终输出是一个包含3个分数的向量:[7.5, -1.8, -1.0]。
这个结果很清晰地表明:根据输入的特征和当前层的权重,网络认为这张图片是“猫”的可能性远大于“狗”或“其他”。如果这是最后一层,再经过Softmax函数转换成概率,我们就会得到一个非常接近 [99%, 0.5%, 0.5%]这样的结果。
和卷积层的Filter一样,这里的权重 (Weights) 和 偏置 (Biases) 也是网络通过反向传播和梯度下降,在大量数据上训练学习到的。
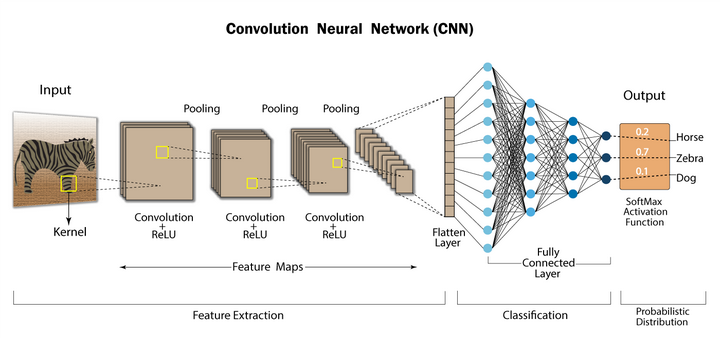
总结一下完整的CNN流程:
[输入图片] -> [特征提取部分 (卷积层 + 池化层)] -> [压平] -> [分类决策部分 (全连接层)] -> [输出概率]
Pytorch 代码实现
接下来,我们用pytorch实现一个mnist手写字识别,来展示CNN的具体使用方式
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import Dataloader# -----------------------------------
# 步骤 1: 定义CNN模型结构
# -----------------------------------
class SimpleCNN(nn.Module):def __init__(self):super(SimpleCNN, self).__init__():# 我们的模型将包含两个“卷积 + 池化”块,然后是一个全连接层# 第一个卷积块# 输入: 1个颜色通道 (灰度图), 输出: 16个特征图 (使用了16个filter)# 卷积核大小: 3x3, 步长: 1, 填充: 1 (可以让28x28的图片卷积后尺寸不变)self.conv1 = nn.Conv2d(in_channels=1, out_channels=16, kernel_size=3, stride=1, padding=1)self.relu1 = nn.ReLU()# 最大池化层, 窗口: 2x2, 步长: 2 (图片尺寸会减半,28x28 -> 14x14)self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2)# 第二个卷积块# 输入: 16个特征图 (来自上一层), 输出: 32个特征图
self.conv2 = nn.Conv2d(in_channels=16, out_channels=32, kernel_size=3, stride=1, padding=1)self.relu2 = nn.ReLU()self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2) # 图片尺寸再次减半, 14x14 -> 7x7# 全连阶层self.fc = nn.Linear(32*7*7, 10)def forward(self,x):# 定义数据在网络中的流动顺序# 输入 x 的尺寸: [batch_size, 1, 28, 28]# 第一个卷积块x = self.pool1(self.relu1(self.conv1(x))) # -> [batch_size, 16, 14, 14]# 第二个卷积块x = self.pool2(self.relu2(self.conv2(x))) # -> [batch_size, 32, 7, 7]# flattenx = x.view(-1, 32*7*7)x = self.fc(x)return x# 准备数据
transform = transform.Compose([transform.ToTensor(),transform.Normalize((0.1307,),(0.3081)) # MNIST数据集的均值和方差
])# 下载并加载测试数据
test_dataset = datasets.MNIST(root='./data', train=False, download=True, transform=transform)
test_loader = DataLoader(test_dataset, batch_size=1000, shuffle=False)# -----------------------------------
# 步骤 3: 训练模型
# -----------------------------------model = SimpleCNN()# 损失函数和优化器
criteria = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.paramters(), lr=0.001)# 训练5个epochs为例
for epoch in range(5):for i, (images, labels) in enumerate(train_loader):outputs = model(images)loss = criterion(outputs, labels)# backforwardoptimizer.zero_grad() # 清空上一轮的梯度loss.backward()optimizer.step()print("Finish Training")# -----------------------------------
# 步骤 4: 在测试集上评估模型
# -----------------------------------
model.eval() # 将模型设置为评估模式,这会关闭Dropout等训练时特有的层
with torch.no_grad():correct = 0total = 0for images, labels in testloader:outputs = model(images)_, predicted = torch.max(output.data, 1)total += labels.size(0)correct += (predicted == labels).sum().item()accuracy = correct / totalprint(f"accuracy of model is {100*accuracy}%")上面的代码中的nn.CrossEntropyLoss 是 PyTorch 中用于多分类任务最常用的损失函数。我们可以把它理解为模型的**“考官”或“评分系统”。它的唯一职责就是:拿到模型的预测结果和真实答案,然后给出一个分数(也就是损失值 Loss**),这个分数衡量了模型“错得有多离谱”。
Loss 很大:说明模型错得非常离谱,需要进行大幅调整。
Loss 很小:说明模型预测得相当不错,只需微调。
要彻底理解它,最关键的一点是:nn.CrossEntropyLoss 在内部自动完成了两件事:
Softmax 操作:将模型的原始输出转换成“概率”。
NLLLoss (Negative Log Likelihood Loss) 计算:根据概率计算最终的损失值。
假设我们正在处理 MNIST 数据集,模型正在看一张手写数字 “2” 的图片。我们的网络最后一层有10个神经元,所以它会输出10个分数,我们称之为 logits。假设这次的输出是:
logits = [0.2, -0.5, 2.5, 0.1, -1.0, ...] (共10个数字)
索引0的分数代表模型认为是“0”的信心。
索引1的分数代表模型认为是“1”的信心。
索引2的分数代表模型认为是“2”的信心,这个分数是2.5,是所有分数里最高的。
这些原始分数有正有负,数值范围也不固定,不够直观。所以我们需要第一步。
第1步:Softmax (内部自动完成)
Softmax 函数能把这一组任意的 logits 分数,转换成一个概率分布。转换后的特点是:
所有值都在 0 到 1 之间。
所有值的总和等于 1。
你可以把它看作是一个“信心转换器”。经过 Softmax 之后,上面的 logits 可能会变成这样:
probabilities = [0.05, 0.02, 0.85, 0.04, 0.01, ...]
现在这个结果就非常直观了:模型有 85% 的把握认为这张图片是 “2”,有 5% 的把握认为是 “0” 等等。
小结:Softmax 把模型的原始输出变成了一个易于理解的概率列表。
第2步:NLLLoss (内部自动完成)
现在模型给出了它的概率预测,而“考官”手里有真实答案 (True Label),就是这张图片确实是数字 “2”。
NLLLoss 的工作就非常简单了:它只关心模型赋给那个“正确答案”的概率是多少。
在我们的例子中,正确答案是“2”,模型给出的对应概率是 0.85。
NLLLoss 会拿出这个概率值 0.85,然后取它的负对数 (Negative Logarithm)。
Loss=−log(0.85)≈0.16
这是一个很小的损失值,因为它接近于0。这等于“考官”在说:“嗯,你对正确答案给出了很高的概率,这次表现不错,给你一个很低的罚分。”
我们再看一个预测错误的例子:
假设模型看另一张 “2” 的图片,但这次给出的概率是: probabilities = [0.4, 0.3, 0.05, 0.1, 0.02, ...]
这次模型只有 5% 的把握认为是 “2”。那么 NLLLoss 就会这样计算:
Loss=−log(0.05)≈3.0
这是一个大得多的损失值。“考官”会说:“你对正确答案只给了这么一丁点的概率,错得太离谱了,给你一个很高的罚分!”
这个巨大的损失值在反向传播时,就会促使模型大幅度地去更新它的权重,以便下次能做出更好的预测。
以上就是CNN网络速成啦,希望能帮到你。
如果对你有帮助,可以给我点个赞不💐