工业机器人如何通过Modbus TCP转CanOpen网关高效通信!
工业机器人通过无锡耐特森ModbusTCP转CanOpen网关MCN-TCPS-CANPM与PLC进行通讯,这是工业自动化中的一种常见场景。在这其中,ModbusTCP和CanOpen是两种常见的工业现场总线协议,而网关则扮演着将这两种协议转换的角色,使得工业机器人可以和PLC(可编程逻辑控制器)进行通信。ModbusTCP是一种基于以太网的协议,它可以将数据打包成TCP/IP格式进行传输。这种协议的优点在于它的开放性,任何设备只要支持ModbusTCP协议就可以进行通信,这大大方便了不同设备之间的连接。
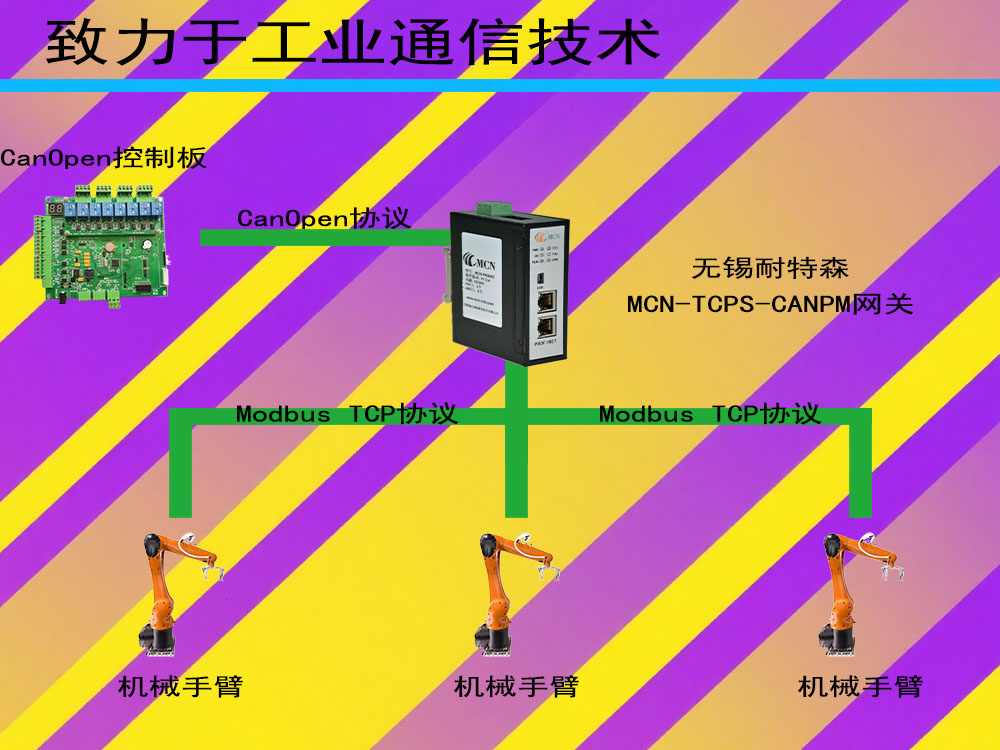
CanOpen它是一种基于CAN总线的应用层协议。CAN总线以其高可靠性和实时性被广泛应用于汽车电子、工业自动化等领域。CanOpen协议定义了设备的通信对象和服务,使得设备之间的通信更加标准化。网关的主要作用就是实现ModbusTCP协议和CanOpen协议之间的转换。在实际应用中,网关通常会接收到来自一方的数据,然后解析这些数据并将其转换成另一种协议的格式,最后再将这些数据发送给另一方。我们就可以实现工业机器人和PLC之间的通信。PLC它是一种用于工业控制的电子设备。PLC可以通过编写程序来实现各种控制功能,如开关控制、顺序控制、计数控制等。在工业自动化领域,PLC是非常重要的设备,它可以大大提高生产效率和质量。

工业机器人通过ModbusTCP转CanOpen网关与PLC进行通讯的过程,其实就是一个协议转换的过程。在这个过程中,我们需要理解各种协议的特点和功能,以及它们如何协同工作以实现设备之间的通信。随着工业自动化技术的不断发展,这种通信方式将会越来越普遍,因此了解它是很有必要的。要实现这种通信并非易事,需要一定的专业知识和技术。需要知道如何配置网关,如何编写PLC程序,以及如何处理可能出现的问题等。还需要考虑网络的稳定性和安全性等问题。

工业机器人通过ModbusTCP转CanOpen网关与PLC进行通讯是一个复杂但非常重要的过程。在这个过程中,我们需要理解各种协议的功能和特点,以及它们如何协同工作。我们还需要具备一定的专业知识和技术,才能顺利实现这种通信。尽管这个过程可能会遇到一些困难,但随着我们的不断学习和实践,我们一定能够克服这些困难,实现工业机器人和PLC之间的高效通信。