一种数字相机中的自动曝光算法
论文《A NEW AUTOMATIC EXPOSURE SYSTEM FOR DIGITAL STILL CAMERAS》Tetsuya Kuno, Hiroaki Sugiura,将曝光函数表达为一个线性等式在此基础上开发了一套 自动曝光控制流程。
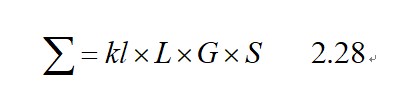
其中是图像的平均亮度,kl是系统的一个常数,L表示的是入射光的照度,G和S分别是增益和曝光时间。于是入射光的照度就能够表示为:

作者为了简化计算2.29将式取对数,从而把除法运算转换成了减法运算:

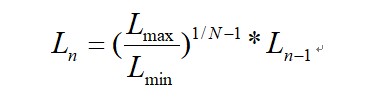
并且将照度在其变化范围内从100lux到10000lux按等比级数分成了N个的分立值,于是logL就对应成了具有N个值等差级数,其中第个n照度值可以表示为:

即:
对上述公式进行展开可知:
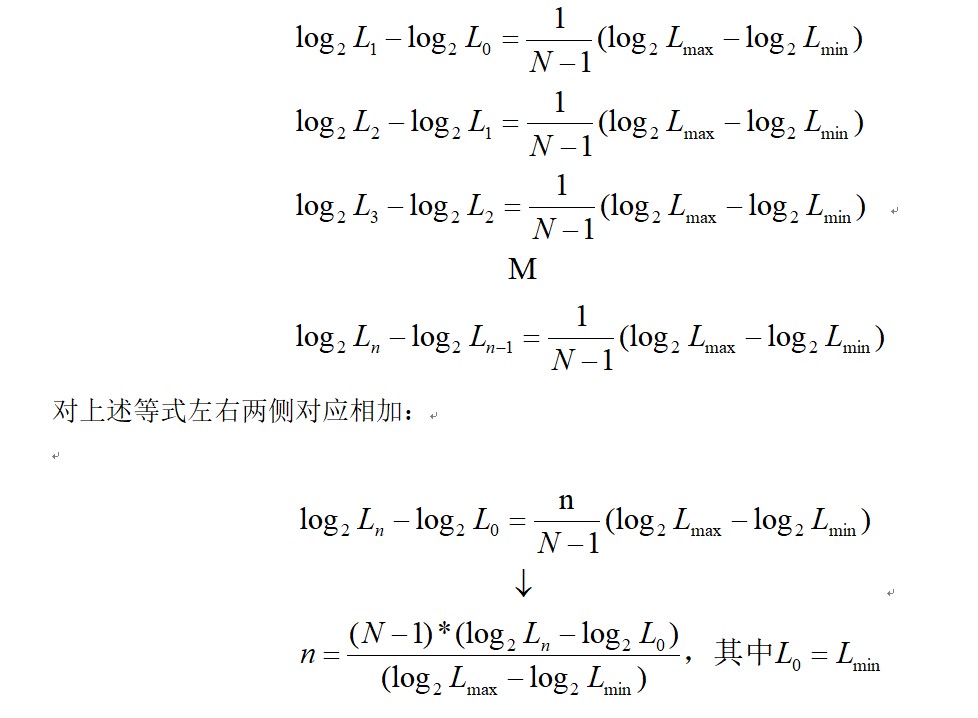

其中C是常数,k2则是常数
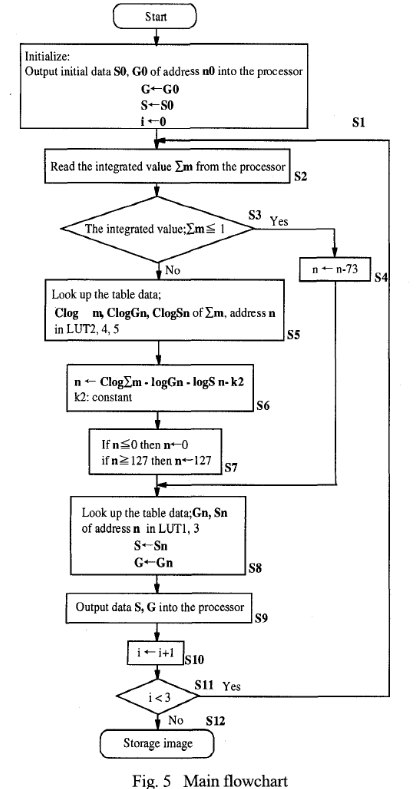
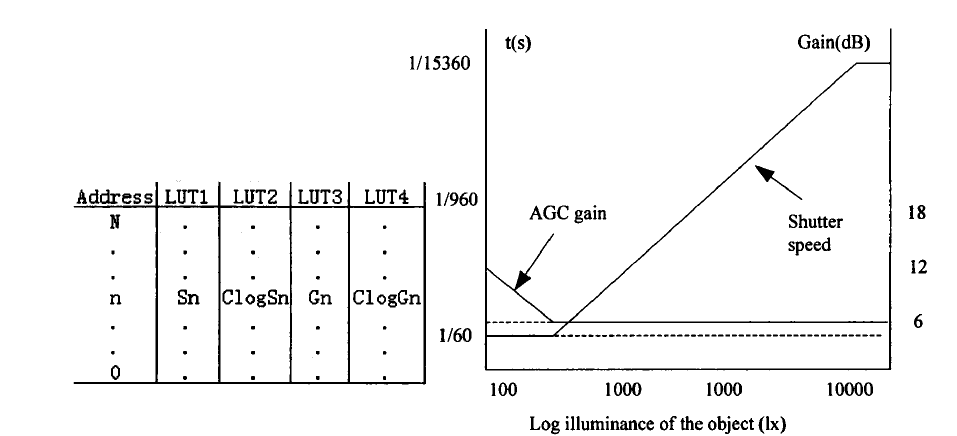
。于是作者通过实验将能够产生最优目标亮度的曝光参数组合(S,logS,G,logG)储存于一张查找表中,而n就对应了该查找表中的每个地址。在执行自动曝光的过程中数码相机首先设置一组初始的增益G0和曝光时间S0 ,生效后将得到初始的图像亮
。随后将上述三个值代入2.32式中就得到了拍摄场景的照度所对应的n值,再查找事先建立的查找表中地址n所对应的曝光参数G和S,将这组参数作为下一帧图像的曝光设置这样一个过程将重 复三次以使得最终结果收敛到一个稳定值。该算法所使用的查找表和每一照度所对应的曝光参数设置如下图所示。在该算法中如何建立一个准确的查找表是自动曝光成功的关键这往往需要事先进行大量的实验。
主要流程图为: