Arduino Nano 33 BLE Sense Rev 2开发板使用指南之【环境搭建 / 点灯】
一、硬件介绍
1、产品特点
Arduino Nano 33 BLE Rev2,利用了nRF52840微控制器的先进功能。这款32位Arm® Cortex®-M4 CPU 64 MHz与MicroPython的兼容性增强了板子的灵活性,使其更容易被更广泛的开发者社区所接受。
该开发板的突出特点是其蓝牙低功耗(Bluetooth® LE)功能,使其能够轻松与其他蓝牙低功耗设备进行通信。Nano 33 BLE Rev2设计具备多功能性,配备了内置的9轴惯性测量单元、提供位置、方向和加速度的精确测量等。


| 微控制器 | nRF52840 | - |
|---|---|---|
| USB连接器 | Micro USB | - |
| 管脚 | LED引脚 | IO13 |
| - | 通用数字I/O 引脚 | 14个 |
| - | 模拟输入引脚 | 8个 |
| - | PWM 引脚 | 所有数字I/O 引脚 (4 at once) |
| - | 外部中断 | 所有数字I/O 引脚 |
| 连接 | Bluetooth® | u-blox® NINA-B306 |
| 传感器 | IMU | BMI270 (三轴加速度计+三轴陀螺仪) BMM150 (三轴磁力计) |
| 麦克风 | MP34DT06JTR | |
| 手势检测、接近检测、数字环境光感(ALS)和色感(RGBC) | APDS9960 | |
| 气压 | LPS22HB | |
| 温湿度 | HS3003 | |
| 通信 | UART | RX/TX |
| - | I2C | A4 (SDA), A5 (SCL) |
| - | SPI | D11 (COPI), D12 (CIPO), D13 (SCK). Use any GPIO for Chip Select (CS) |
| 供电 | 输入 / 输出电压 | 3.3 V |
| - | 输入电压(标准) | 5-18 V |
| - | 每个I/O引脚的电流 | 10 mA |
| nRF52840 | 时钟速度 | 64 MHz |
| - | 存储 | 256 KB SRAM、1 MB flash |
| 尺寸 | 重量 | 0.32g |
| - | 宽度 | 18 mm |
| - | 长度 | 45 mm |
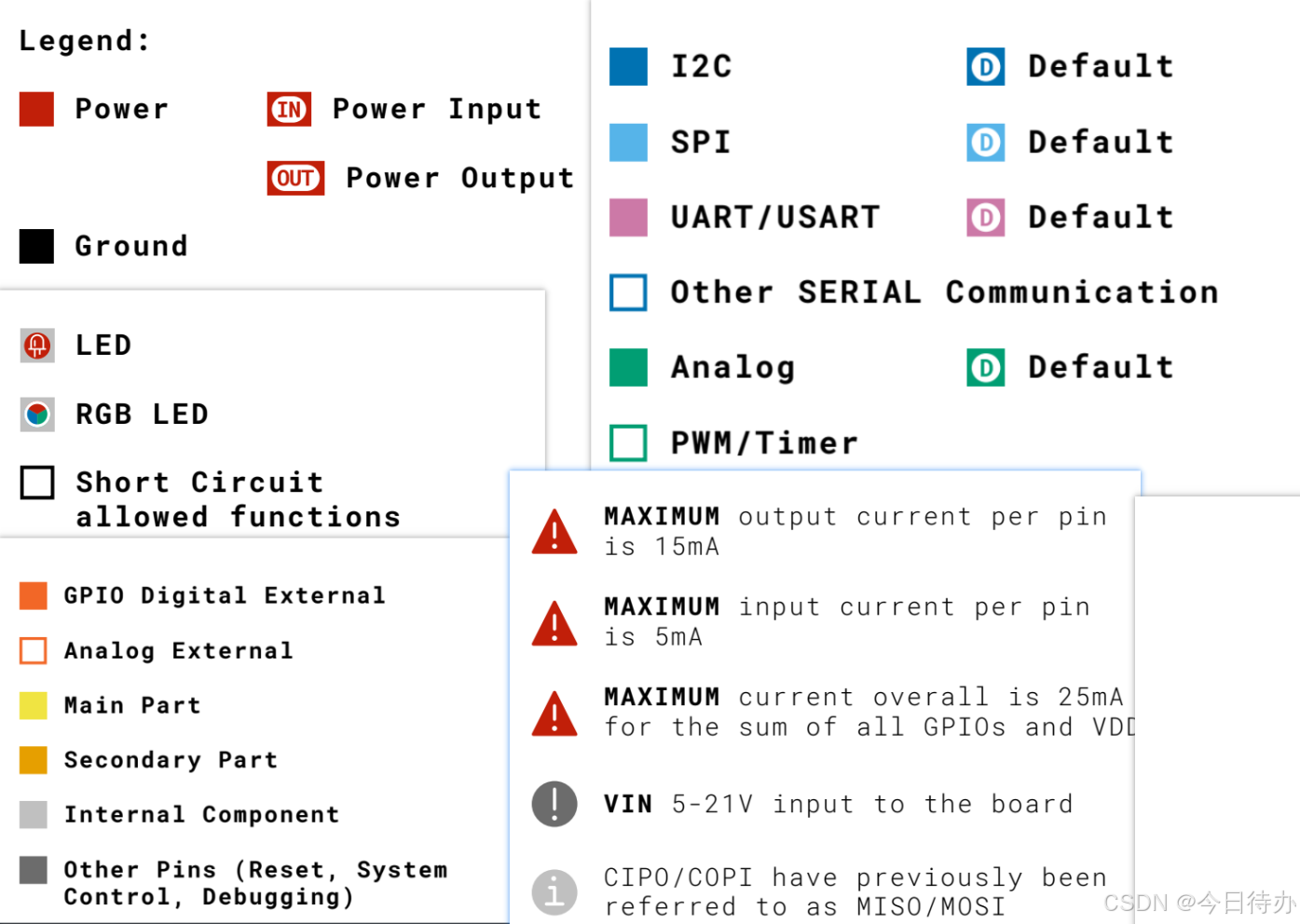
2、功能引脚示意图 / 原理图
板载LED灯
IO13 引脚控制
原理图:



5V引脚仅在满足以下两个条件时可用:标记为VUSB的两个焊盘上制作焊接桥 / 通过USB端口为 Nano 33 BLE Sense Rev2 供电。
如果从VIN引脚给电路板供电,不会得到任何稳定的5V,即使你做焊接桥,5V引脚也不会输出。
关于 Arduino Nano 33 BLE Sense Rev1 和 Rev2 的区别如下:
两个版本之间的传感器有以下变化
1、将LSM9DS1(9轴IMU) 替换为两个 (BMI270 - 6轴IMU 和 BMM150 - 3轴IMU) 的组合。
2、将HTS221的温湿度传感器更换为 HS3003。
3、将麦克风从MP34DT05 更换为 MP34DT06JTR。
4、将电源MPM3610更换为 MP2322。
5、在电路板的顶部增加VUSB焊接跳线。
6、USB、SWDIO 和 SWCLK 的新测试点。
二、环境搭建
开发环境主要有【Arduino环境】、【MicroPython 环境】等
在此,使用【Arduino IDE】完成开发;
1、Arduino IDE下载
Arduino IDE下载地址

2、Arduino IDE配置
1、下载SDK
点击左侧第二个,并搜索Nano 33 BLE Sense,并安装对应的SDK包;

2、选择开发板
选择“Nano 33 BLE Sense”开发板;

三、代码编写
Nano 33 BLE Sense Rev 2 官方开发教程
实现效果:板载的LED灯按200ms的间隔闪烁
void setup() {pinMode(LED_BUILTIN, OUTPUT);//设置引脚为输出模式
}void loop() {digitalWrite(LED_BUILTIN, HIGH); //输出高电平,点亮LED灯delay(200); // 延时200msdigitalWrite(LED_BUILTIN, LOW); //输出低电平,熄灭LED灯 delay(200); // 延时200ms
}
四、程序烧录
1、用Micro USB数据线连接开发板至电脑上;
2、编写好程序代码后,点击上传按钮,将程序烧录至开发板上;

五、演示效果
板载的LED灯以200ms的间隔闪烁
