矩阵变换终极笔记
旋转矩阵的定义
重中之重,定义搞不清楚就会被各种变换搞晕!

RBA是什么:{A}中的坐标在{B}中的描述(即{A}在{B}中的描述),换句话也可以用来表示两个坐标系之间的旋转变换(即{B}->{A}的旋转变换)
额外补充变换矩阵的定义:
T A B = [ R A B t A B 0 1 ] T_A^B = \begin{bmatrix} R_A^B & t_A^B \\ 0 & 1 \end{bmatrix} TAB=[RAB0tAB1]
这里的 t A B = t B A t_A^B = t_{BA} tAB=tBA,表示的是{B}原点指向{A}原点的向量,是在{B}下取得坐标。
旋转矩阵旋转方向
参考文章

角标对消方法

旋转矩阵左乘和右乘的几何意义
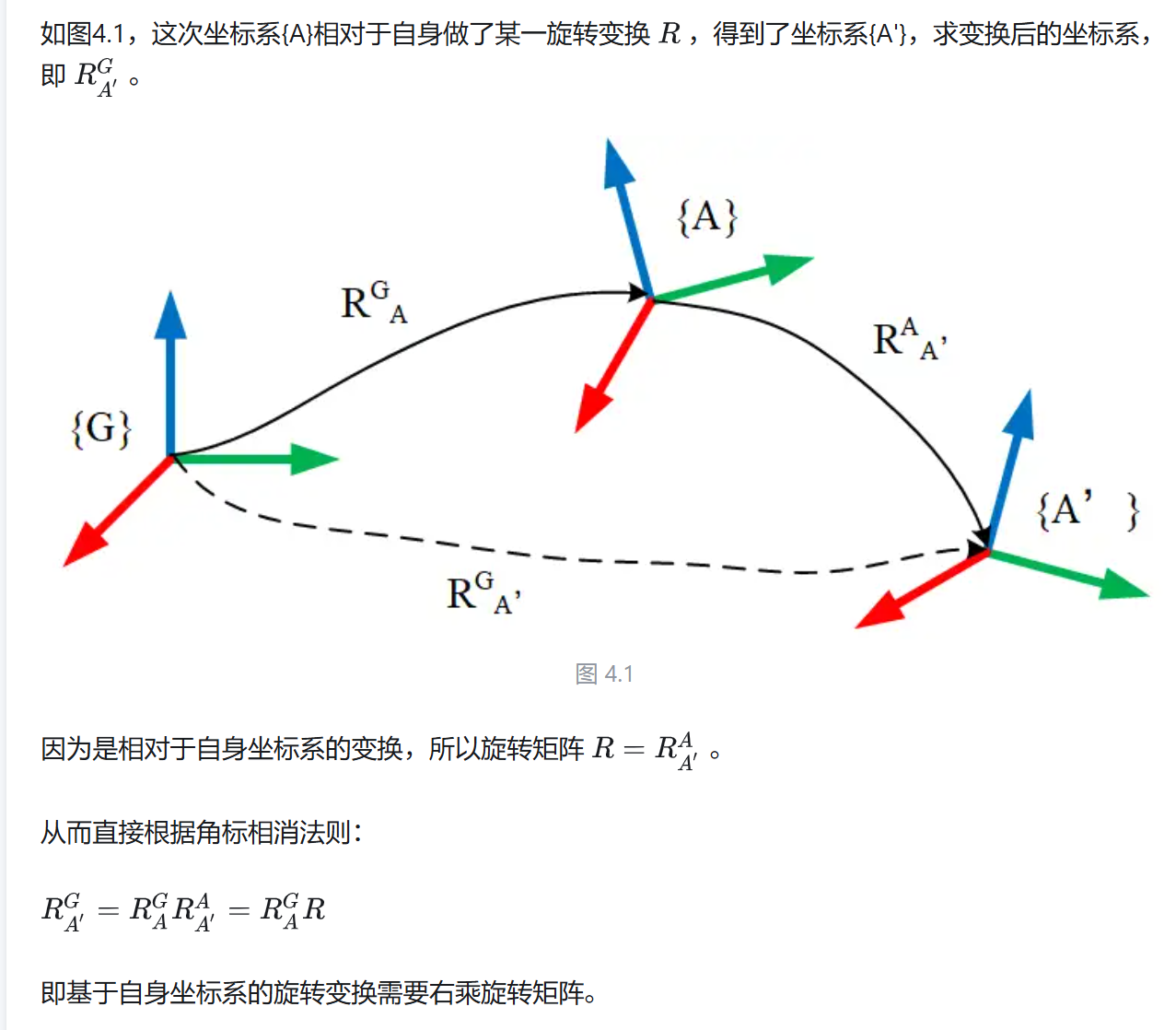
基于全局坐标系的旋转变换左乘旋转矩阵,基于自身坐标系的旋转变换右乘旋转矩阵。(无论是左乘还是右乘方向都遵循右手螺旋定则)
这里的左乘就是直接在左边相乘旋转矩阵,右乘就是直接在右边相乘旋转矩阵。具体参考:这篇文章
上述文章的的3.左乘旋转矩阵内容一些补充:



旋转矩阵右乘:右乘一个旋转矩阵就是基于左边那个坐标系进行变换
假如有 T A ‘ G , T A G T_{A`}^G,T_A^G TA‘G,TAG,那么 T A G ∗ T A ‘ G T_A^G * T_{A`}^G TAG∗TA‘G表示什么含义呢,实际上就是基于{A}坐标系中进行 T A ‘ G T_{A`}^G TA‘G的变换。
右乘在向量变换这一块常常用于回调坐标系表述

本文参考内容
1.七秒鱼知乎回答
2.默以成之CSDN