43这周打卡——生成手势图像 (可控制生成)
目录
前言
1.导入数据及数据可视化
2.构建模型
3.训练模型
4.模型分析并生成指定图像
总结
前言
- 🍨 本文为🔗365天深度学习训练营中的学习记录博客
- 🍖 原作者:K同学啊
1.导入数据及数据可视化
from torchvision import datasets, transforms
from torch.autograd import Variable
from torchvision.utils import save_image, make_grid
from torchsummary import summary
import matplotlib.pyplot as plt
import numpy as np
import torch.nn as nn
import torch.optim as optim
import torchdevice = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
devicebatch_size = 128train_transform = transforms.Compose([transforms.Resize(128),transforms.ToTensor(),transforms.Normalize([0.5,0.5,0.5], [0.5,0.5,0.5])])train_dataset = datasets.ImageFolder(root='data/data/rps/', transform=train_transform)train_loader = torch.utils.data.DataLoader(dataset=train_dataset, batch_size=batch_size, shuffle=True,num_workers=6)# 可视化第一个 batch 的数据
def show_images(dl):for images, _ in dl:fig, ax = plt.subplots(figsize=(10, 10))ax.set_xticks([]); ax.set_yticks([])ax.imshow(make_grid(images.detach(), nrow=16).permute(1, 2, 0))breakshow_images(train_loader)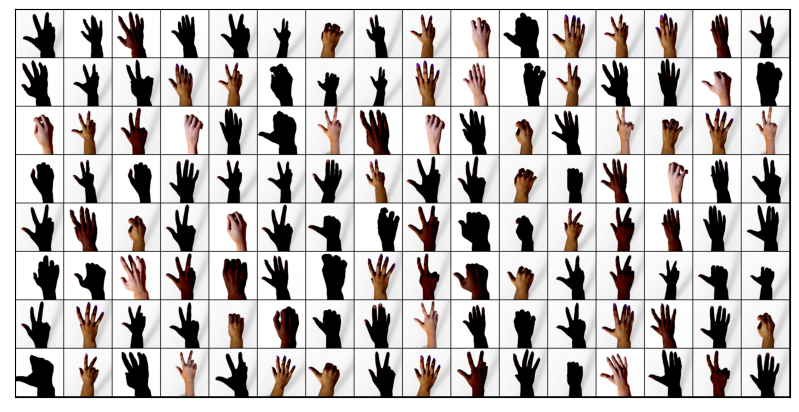
2.构建模型
latent_dim = 100
n_classes = 3
embedding_dim = 100# 自定义权重初始化函数,用于初始化生成器和判别器的权重
def weights_init(m):# 获取当前层的类名classname = m.__class__.__name__# 如果当前层是卷积层(类名中包含 'Conv' )if classname.find('Conv') != -1:# 使用正态分布随机初始化权重,均值为0,标准差为0.02torch.nn.init.normal_(m.weight, 0.0, 0.02)# 如果当前层是批归一化层(类名中包含 'BatchNorm' )elif classname.find('BatchNorm') != -1:# 使用正态分布随机初始化权重,均值为1,标准差为0.02torch.nn.init.normal_(m.weight, 1.0, 0.02)# 将偏置项初始化为全零torch.nn.init.zeros_(m.bias)class Generator(nn.Module):def __init__(self):super(Generator, self).__init__()# 定义条件标签的生成器部分,用于将标签映射到嵌入空间中# n_classes:条件标签的总数# embedding_dim:嵌入空间的维度self.label_conditioned_generator = nn.Sequential(nn.Embedding(n_classes, embedding_dim), # 使用Embedding层将条件标签映射为稠密向量nn.Linear(embedding_dim, 16) # 使用线性层将稠密向量转换为更高维度)# 定义潜在向量的生成器部分,用于将噪声向量映射到图像空间中# latent_dim:潜在向量的维度self.latent = nn.Sequential(nn.Linear(latent_dim, 4*4*512), # 使用线性层将潜在向量转换为更高维度nn.LeakyReLU(0.2, inplace=True) # 使用LeakyReLU激活函数进行非线性映射)# 定义生成器的主要结构,将条件标签和潜在向量合并成生成的图像self.model = nn.Sequential(# 反卷积层1:将合并后的向量映射为64x8x8的特征图nn.ConvTranspose2d(513, 64*8, 4, 2, 1, bias=False),nn.BatchNorm2d(64*8, momentum=0.1, eps=0.8), # 批标准化nn.ReLU(True), # ReLU激活函数# 反卷积层2:将64x8x8的特征图映射为64x4x4的特征图nn.ConvTranspose2d(64*8, 64*4, 4, 2, 1, bias=False),nn.BatchNorm2d(64*4, momentum=0.1, eps=0.8),nn.ReLU(True),# 反卷积层3:将64x4x4的特征图映射为64x2x2的特征图nn.ConvTranspose2d(64*4, 64*2, 4, 2, 1, bias=False),nn.BatchNorm2d(64*2, momentum=0.1, eps=0.8),nn.ReLU(True),# 反卷积层4:将64x2x2的特征图映射为64x1x1的特征图nn.ConvTranspose2d(64*2, 64*1, 4, 2, 1, bias=False),nn.BatchNorm2d(64*1, momentum=0.1, eps=0.8),nn.ReLU(True),# 反卷积层5:将64x1x1的特征图映射为3x64x64的RGB图像nn.ConvTranspose2d(64*1, 3, 4, 2, 1, bias=False),nn.Tanh() # 使用Tanh激活函数将生成的图像像素值映射到[-1, 1]范围内)def forward(self, inputs):noise_vector, label = inputs# 通过条件标签生成器将标签映射为嵌入向量label_output = self.label_conditioned_generator(label)# 将嵌入向量的形状变为(batch_size, 1, 4, 4),以便与潜在向量进行合并label_output = label_output.view(-1, 1, 4, 4)# 通过潜在向量生成器将噪声向量映射为潜在向量latent_output = self.latent(noise_vector)# 将潜在向量的形状变为(batch_size, 512, 4, 4),以便与条件标签进行合并latent_output = latent_output.view(-1, 512, 4, 4)# 将条件标签和潜在向量在通道维度上进行合并,得到合并后的特征图concat = torch.cat((latent_output, label_output), dim=1)# 通过生成器的主要结构将合并后的特征图生成为RGB图像image = self.model(concat)return image
generator = Generator().to(device)
generator.apply(weights_init)
print(generator)from torchinfo import summarysummary(generator)a = torch.ones(100)
b = torch.ones(1)
b = b.long()
a = a.to(device)
b = b.to(device)import torch
import torch.nn as nnclass Discriminator(nn.Module):def __init__(self):super(Discriminator, self).__init__()# 定义一个条件标签的嵌入层,用于将类别标签转换为特征向量self.label_condition_disc = nn.Sequential(nn.Embedding(n_classes, embedding_dim), # 嵌入层将类别标签编码为固定长度的向量nn.Linear(embedding_dim, 3*128*128) # 线性层将嵌入的向量转换为与图像尺寸相匹配的特征张量)# 定义主要的鉴别器模型self.model = nn.Sequential(nn.Conv2d(6, 64, 4, 2, 1, bias=False), # 输入通道为6(包含图像和标签的通道数),输出通道为64,4x4的卷积核,步长为2,padding为1nn.LeakyReLU(0.2, inplace=True), # LeakyReLU激活函数,带有负斜率,增加模型对输入中的负值的感知能力nn.Conv2d(64, 64*2, 4, 3, 2, bias=False), # 输入通道为64,输出通道为64*2,4x4的卷积核,步长为3,padding为2nn.BatchNorm2d(64*2, momentum=0.1, eps=0.8), # 批量归一化层,有利于训练稳定性和收敛速度nn.LeakyReLU(0.2, inplace=True),nn.Conv2d(64*2, 64*4, 4, 3, 2, bias=False), # 输入通道为64*2,输出通道为64*4,4x4的卷积核,步长为3,padding为2nn.BatchNorm2d(64*4, momentum=0.1, eps=0.8),nn.LeakyReLU(0.2, inplace=True),nn.Conv2d(64*4, 64*8, 4, 3, 2, bias=False), # 输入通道为64*4,输出通道为64*8,4x4的卷积核,步长为3,padding为2nn.BatchNorm2d(64*8, momentum=0.1, eps=0.8),nn.LeakyReLU(0.2, inplace=True),nn.Flatten(), # 将特征图展平为一维向量,用于后续全连接层处理nn.Dropout(0.4), # 随机失活层,用于减少过拟合风险nn.Linear(4608, 1), # 全连接层,将特征向量映射到输出维度为1的向量nn.Sigmoid() # Sigmoid激活函数,用于输出范围限制在0到1之间的概率值)def forward(self, inputs):img, label = inputs# 将类别标签转换为特征向量label_output = self.label_condition_disc(label)# 重塑特征向量为与图像尺寸相匹配的特征张量label_output = label_output.view(-1, 3, 128, 128)# 将图像特征和标签特征拼接在一起作为鉴别器的输入concat = torch.cat((img, label_output), dim=1)# 将拼接后的输入通过鉴别器模型进行前向传播,得到输出结果output = self.model(concat)return outputdiscriminator = Discriminator().to(device)
discriminator.apply(weights_init)
print(discriminator)summary(discriminator)a = torch.ones(2,3,128,128)
b = torch.ones(2,1)
b = b.long()
a = a.to(device)
b = b.to(device)c = discriminator((a,b))
c.size()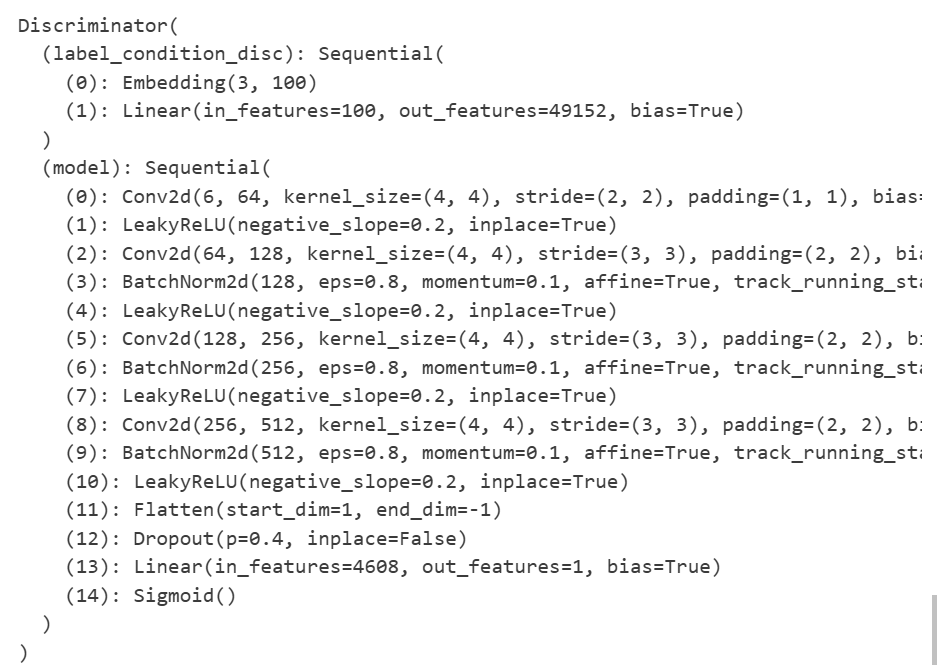
3.训练模型
adversarial_loss = nn.BCELoss() def generator_loss(fake_output, label):gen_loss = adversarial_loss(fake_output, label)return gen_lossdef discriminator_loss(output, label):disc_loss = adversarial_loss(output, label)return disc_losslearning_rate = 0.0002G_optimizer = optim.Adam(generator.parameters(), lr = learning_rate, betas=(0.5, 0.999))
D_optimizer = optim.Adam(discriminator.parameters(), lr = learning_rate, betas=(0.5, 0.999))# 设置训练的总轮数
num_epochs = 300
# 初始化用于存储每轮训练中判别器和生成器损失的列表
D_loss_plot, G_loss_plot = [], []# 循环进行训练
for epoch in range(1, num_epochs + 1):# 初始化每轮训练中判别器和生成器损失的临时列表D_loss_list, G_loss_list = [], []# 遍历训练数据加载器中的数据for index, (real_images, labels) in enumerate(train_loader):# 清空判别器的梯度缓存D_optimizer.zero_grad()# 将真实图像数据和标签转移到GPU(如果可用)real_images = real_images.to(device)labels = labels.to(device)# 将标签的形状从一维向量转换为二维张量(用于后续计算)labels = labels.unsqueeze(1).long()# 创建真实目标和虚假目标的张量(用于判别器损失函数)real_target = Variable(torch.ones(real_images.size(0), 1).to(device))fake_target = Variable(torch.zeros(real_images.size(0), 1).to(device))# 计算判别器对真实图像的损失D_real_loss = discriminator_loss(discriminator((real_images, labels)), real_target)# 从噪声向量中生成假图像(生成器的输入)noise_vector = torch.randn(real_images.size(0), latent_dim, device=device)noise_vector = noise_vector.to(device)generated_image = generator((noise_vector, labels))# 计算判别器对假图像的损失(注意detach()函数用于分离生成器梯度计算图)output = discriminator((generated_image.detach(), labels))D_fake_loss = discriminator_loss(output, fake_target)# 计算判别器总体损失(真实图像损失和假图像损失的平均值)D_total_loss = (D_real_loss + D_fake_loss) / 2D_loss_list.append(D_total_loss.item())# 反向传播更新判别器的参数D_total_loss.backward()D_optimizer.step()# 清空生成器的梯度缓存G_optimizer.zero_grad()# 计算生成器的损失G_loss = generator_loss(discriminator((generated_image, labels)), real_target)G_loss_list.append(G_loss.item())# 反向传播更新生成器的参数G_loss.backward()G_optimizer.step()# 打印当前轮次的判别器和生成器的平均损失print('Epoch: [%d/%d]: D_loss: %.3f, G_loss: %.3f' % ((epoch), num_epochs, torch.mean(torch.FloatTensor(D_loss_list)), torch.mean(torch.FloatTensor(G_loss_list))))# 将当前轮次的判别器和生成器的平均损失保存到列表中D_loss_plot.append(torch.mean(torch.FloatTensor(D_loss_list)))G_loss_plot.append(torch.mean(torch.FloatTensor(G_loss_list)))if epoch%10 == 0:# 将生成的假图像保存为图片文件save_image(generated_image.data[:50], './images/sample_%d' % epoch + '.png', nrow=5, normalize=True)# 将当前轮次的生成器和判别器的权重保存到文件torch.save(generator.state_dict(), './training_weights/generator_epoch_%d.pth' % (epoch))torch.save(discriminator.state_dict(), './training_weights/discriminator_epoch_%d.pth' % (epoch))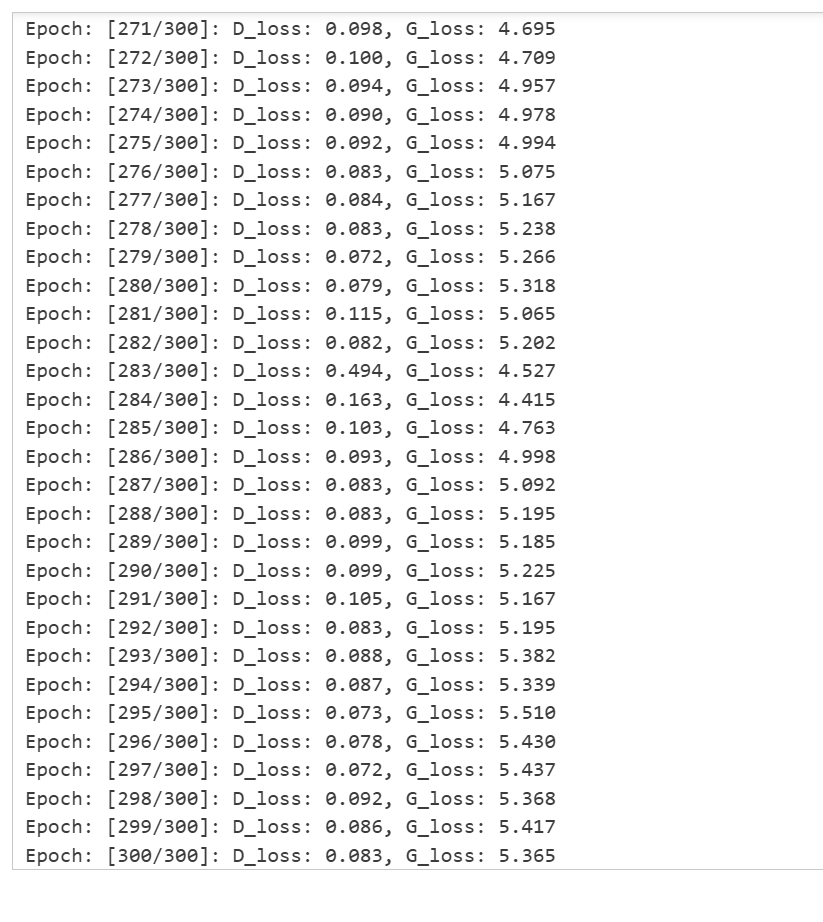
4.模型分析并生成指定图像
G_loss_list = [i.item() for i in G_loss_plot]
D_loss_list = [i.item() for i in D_loss_plot]import matplotlib.pyplot as plt
#隐藏警告
import warnings
warnings.filterwarnings("ignore") #忽略警告信息
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号
plt.rcParams['figure.dpi'] = 100 #分辨率plt.figure(figsize=(8,4))
plt.title("Generator and Discriminator Loss During Training")
plt.plot(G_loss_list,label="G")
plt.plot(D_loss_list,label="D")
plt.xlabel("iterations")
plt.ylabel("Loss")
plt.legend()
plt.show()# 导入所需的库
from numpy.random import randint, randn
from numpy import linspace
from matplotlib import pyplot, gridspec# 导入生成器模型
generator.load_state_dict(torch.load('./training_weights/generator_epoch_300.pth'), strict=False)
generator.eval() interpolated = randn(100) # 生成两个潜在空间的点
# 将数据转换为torch张量并将其移至GPU(假设device已正确声明为GPU)
interpolated = torch.tensor(interpolated).to(device).type(torch.float32)label = 0 # 手势标签,可在0,1,2之间选择
labels = torch.ones(1) * label
labels = labels.to(device).unsqueeze(1).long()# 使用生成器生成插值结果
predictions = generator((interpolated, labels))
predictions = predictions.permute(0,2,3,1).detach().cpu()#隐藏警告
import warnings
warnings.filterwarnings("ignore") #忽略警告信息
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号
plt.rcParams['figure.dpi'] = 100 #分辨率plt.figure(figsize=(8, 3))pred = (predictions[0, :, :, :] + 1 ) * 127.5
pred = np.array(pred)
plt.imshow(pred.astype(np.uint8))
plt.show()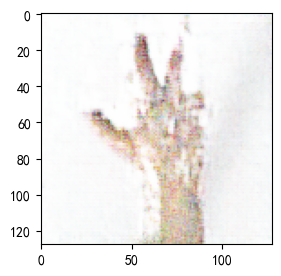
总结
在本次实验中,我们完成了数据准备、模型构建、训练与结果分析的完整流程。
数据准备方面,采用 torchvision.datasets.ImageFolder 从自定义文件夹中加载图像数据,并依次进行缩放、张量化和归一化等预处理操作。为了直观了解输入情况,利用 show_images 函数展示了训练集中首个批次的图像,这有助于确认数据管道是否正常。
模型设计部分包括生成器和判别器两个核心模块。生成器接收潜在向量与类别标签作为输入,其中类别标签先经过嵌入层映射为特征向量,再与潜在向量结合,经由多层反卷积逐步生成目标图像。判别器则接收图像和类别标签作为输入,将标签转化为特征图并与图像拼接,随后通过多层卷积进行特征提取,最终输出一个标量用于判别真伪。此外,使用自定义的 weights_init 方法对模型参数进行初始化,保证了训练的稳定性。
在训练过程中,损失函数选择了二元交叉熵(BCELoss),优化器采用 Adam,对生成器与判别器分别进行参数更新。具体流程为:在每个 epoch 内,判别器和生成器交替更新;对于每个 batch,先更新判别器,使其更好地区分真实与伪造图像,再更新生成器,使其生成的结果更具迷惑性。训练过程中,每隔 10 个 epoch 保存生成样本和模型权重,方便后续分析与复现。
结果分析环节,通过记录生成器和判别器的损失曲线,可以直观反映训练进展和收敛趋势。随着对抗博弈的进行,生成器不断提高欺骗判别器的能力,而判别器也在努力提升辨别水平,二者的竞争推动了模型整体性能的提升。