【AI论文】Robix:一种面向机器人交互、推理与规划的统一模型
摘要:我们推出Robix这一统一模型,它将机器人推理、任务规划以及自然语言交互功能整合于单一的视觉语言架构之中。作为分层机器人系统中的高层认知层,Robix能够动态地为低层控制器生成原子指令,并为人机交互生成语言回复,使机器人能够在端到端框架内遵循复杂指令、规划长期任务,并与人类自然交互。此外,Robix还引入了主动对话、实时中断处理以及任务执行过程中的情境感知常识推理等新功能。Robix的核心在于利用思维链推理,并采用三阶段训练策略:(1)持续预训练,以增强基础具身推理能力,包括三维空间理解、视觉定位和以任务为中心的推理;(2)有监督微调,将人机交互和任务规划建模为统一的推理-动作序列;(3)强化学习,以提高推理-动作的一致性和长期任务的连贯性。大量实验表明,在交互式任务执行方面,Robix的表现优于开源和商业基线模型(如GPT-4o和Gemini 2.5 Pro),在多种指令类型(如开放式、多阶段、受限、无效和中断指令)以及各类涉及用户的任务(如收拾餐桌、杂货购物和饮食筛选)中均展现出强大的泛化能力。Huggingface链接:Paper page,论文链接:2509.01106
研究背景和目的
研究背景:
随着人工智能技术的快速发展,通用型机器人系统在日常生活和复杂环境中的应用前景日益广阔。然而,要实现这一愿景,机器人不仅需要能够执行简单的命令,还必须具备与人类进行自然交互、理解复杂指令并进行长程任务规划的能力。例如,在清理餐桌时,机器人不仅需要识别餐具和餐具的摆放,还需要理解诸如“如果人们吃完了,才清理盘子”这样的微妙指令,并能适应如“留下那个玻璃杯”这样的实时纠正。现有的机器人系统往往缺乏这种多模态交互和复杂任务规划的能力,限制了它们在动态环境中的应用。
研究目的:
本研究旨在开发一个名为Robix的统一模型,该模型能够集成机器人推理、任务规划和自然语言交互能力,使机器人能够在端到端的框架内遵循复杂指令、规划长程任务,并与人类进行自然交互。具体而言,研究目标包括:
- 实现复杂指令的理解与执行:使机器人能够理解并执行包含多层次条件和实时反馈的复杂指令。
- 支持长程任务规划:使机器人能够规划并执行需要多个步骤才能完成的长程任务。
- 增强自然交互能力:使机器人能够与人类进行自然对话,澄清模糊指令,推断用户意图,并在任务执行过程中进行动态重新规划。
- 提升模型在实际应用中的鲁棒性:通过广泛的实验验证,确保模型在多种实际场景中的有效性和鲁棒性。
研究方法
1. 模型架构设计:
Robix采用统一的视觉-语言架构,作为分层机器人系统中的高级认知层。该模型动态生成低层控制器的原子命令和与人类交互的口头响应,实现复杂指令的遵循、长程任务的规划和与人类的自然交互。具体而言,Robix通过链式思考(Chain-of-Thought)推理,将交互式任务执行视为统一的推理-行动序列。
2. 数据合成与训练策略:
- 数据合成:为了克服真实世界交互数据的稀缺性,研究设计了一个数据合成流程,将现有的任务规划数据集转化为人类-机器人交互轨迹。该流程包括七种类型的交互指令合成,涵盖多阶段指令、约束指令、开放指令、无效指令、模糊指令和聊天指令等。
- 三阶段训练策略:
- 持续预训练:在通用视觉-语言模型的基础上,通过大规模预训练增强基础具身推理能力,包括3D空间理解、视觉定位和任务中心推理。
- 监督微调:利用合成数据集进行监督微调,将人类-机器人交互和任务规划建模为统一的推理-行动序列。
- 强化学习:通过强化学习进一步提高推理-行动一致性,特别是在长程任务中的表现。
3. 实验设计:
- 基准测试:在多个基准测试上评估Robix的性能,包括公开的视觉-语言基准测试(如3D空间理解、视觉定位、任务中心推理)和专门设计的交互式任务基准测试。
- 实际场景测试:在实际机器人系统上部署Robix,评估其在真实世界任务中的表现,包括桌面清理、饮食过滤、杂货购物等任务。
研究结果
1. 基准测试性能:
- 在公开的视觉-语言基准测试上,Robix在多个任务上表现出色,特别是在3D空间理解、视觉定位和任务中心推理方面,超越了多个先进的商业和开源模型。
- 在交互式任务基准测试上,Robix在分布内(ID)和分布外(OOD)场景中均表现出色,显著优于所有基线方法,包括GPT-4o和Gemini-2.5-Pro等领先的商业模型。
2. 实际场景性能:
- 在实际机器人系统上,Robix在多个真实世界任务中表现出色,任务完成率显著高于基线方法。特别是在动态环境中,Robix能够实时处理用户反馈,动态重新规划任务,展现出强大的适应性和鲁棒性。
3. 模型能力验证:
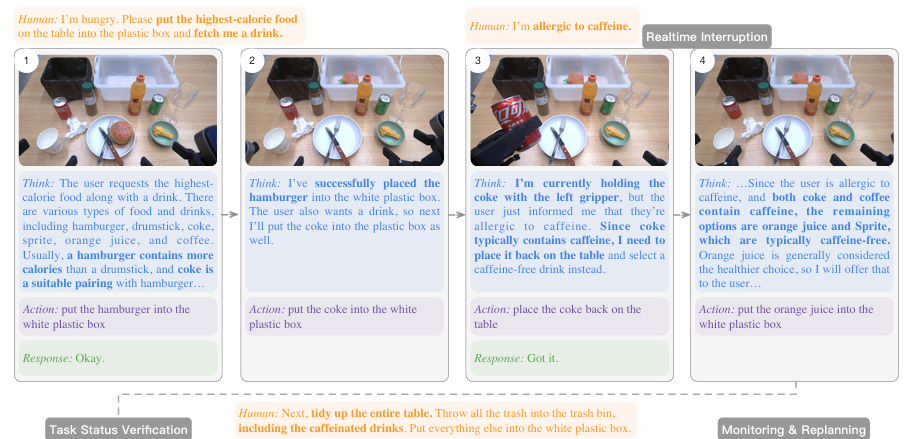
- Robix展示了多种先进能力,包括主动对话、实时中断处理、上下文感知常识推理等。例如,在桌面清理任务中,Robix能够主动询问用户关于模糊指令的澄清,根据用户反馈动态调整任务计划,并成功完成任务。
研究局限
1. 数据集的局限性:
尽管研究通过数据合成方法生成了大规模的训练数据,但这些数据仍然无法完全模拟真实世界的复杂性和多样性。未来需要进一步收集和标注真实世界的人类-机器人交互数据,以提高模型的泛化能力。
2. 模型复杂度的权衡:
Robix模型在保持高效推理的同时,通过统一架构实现了多种复杂功能。然而,随着模型复杂度的增加,训练和推理成本也相应上升。未来需要探索更高效的模型压缩和加速技术,以降低模型部署的门槛。
3. 实时性能的优化:
在实际应用中,Robix需要实时处理视觉输入和用户反馈,并生成相应的动作和响应。尽管研究通过优化推理过程和并行处理技术提高了实时性能,但在某些复杂场景下,模型的响应时间仍然较长。未来需要进一步优化模型的推理速度和资源利用率。
未来研究方向
1. 扩展模型能力:
- 更复杂的交互能力:探索更丰富的交互方式,如手势识别、语音情感分析等,以提高机器人与人类的交互自然度。
- 多模态感知与融合:结合视觉、听觉、触觉等多种传感器数据,提高机器人对环境的感知和理解能力。
2. 提升模型泛化能力:
- 真实世界数据收集:收集更多真实世界的人类-机器人交互数据,以提高模型在真实场景中的泛化能力。
- 跨领域迁移学习:探索将模型在其他领域(如自动驾驶、智能家居等)学到的知识迁移到机器人领域,以加速模型训练和提高性能。
3. 优化实时性能:
- 模型压缩与加速:研究更高效的模型压缩和加速技术,如量化、剪枝、知识蒸馏等,以降低模型推理的延迟和资源消耗。
- 并行处理与分布式计算:利用并行处理和分布式计算技术,提高模型在处理多模态数据和复杂任务时的实时性能。
4. 探索新的应用场景:
- 医疗辅助机器人:将Robix模型应用于医疗领域,开发能够协助医生进行手术、康复训练等任务的辅助机器人。
- 教育机器人:开发能够与学生进行自然交互、提供个性化学习体验的教育机器人。
- 服务机器人:在酒店、餐厅等场景中部署服务机器人,提供迎宾、导览、送餐等服务。
5. 加强伦理与安全性研究:
- 隐私保护:研究如何在收集和处理用户数据时保护用户隐私,避免数据泄露和滥用。
- 安全性验证:对机器人系统的安全性进行全面验证,确保其在执行任务时不会对人类和环境造成危害。
- 人机协作伦理:探讨人机协作过程中的伦理问题,如责任归属、决策透明度等,为机器人技术的可持续发展提供伦理指导。