linux下camera 详细驱动流程 OV02K10为例(chatgpt版本)
好的 👍
你上传的这个文件是 OV02K10 摄像头传感器的 Linux 内核驱动(V4L2 子设备驱动,基于 i2c 通信)。驱动的核心作用是:通过 I²C 总线对摄像头寄存器进行读写,配置摄像头工作模式(分辨率、帧率、HDR/线性模式、增益、曝光等),并提供 V4L2 接口给上层应用调用。
我来给你做一个通俗易懂的注释讲解,我先从代码的结构和关键部分解释,然后逐步深入:
🔑 文件整体结构
-
头文件引用
包含了 Linux 内核里和驱动开发相关的头文件,比如i2c.h、v4l2-subdev.h等。 -
宏定义
定义了寄存器地址、一些常量、默认参数。例如:#define OV02K10_REG_CHIP_ID 0x300a // 芯片 ID 寄存器 #define OV02K10_MODE_STREAMING BIT(0) // 开始输出视频数据 #define OV02K10_REG_CTRL_MODE 0x0100 // 控制工作模式 -
数据结构 struct ov02k10
用来保存摄像头的所有运行时信息,比如 i2c_client 指针、时钟、GPIO、电源、V4L2 控件(曝光、增益、翻转等)。 -
寄存器表 regval
驱动里常见的写法:把一组寄存器配置存在一个数组里(比如ov02k10_global_regs),方便一次性写入初始化。 -
驱动核心函数
ov02k10_write_reg/ov02k10_read_reg→ I2C 读写寄存器ov02k10_start_stream/ov02k10_stop_stream→ 开启/停止视频流ov02k10_set_fmt→ 设置分辨率/像素格式ov02k10_set_ctrl→ 设置控制参数(曝光、增益、翻转、测试图案等)- 电源管理(
__ov02k10_power_on/__ov02k10_power_off)
-
V4L2 回调接口
.s_power、.s_stream→ 控制电源和数据流.set_fmt、.get_fmt→ 设置/获取格式.ioctl→ 处理特殊命令(HDR、快速开关等).enum_frame_size/.enum_mbus_code→ 枚举支持的分辨率/格式
📌 举例详细注释
以 ov02k10_write_reg 函数为例:
/* 向寄存器写数据(最多4字节) */
static int ov02k10_write_reg(struct i2c_client *client, u16 reg,u32 len, u32 val)
{u32 buf_i, val_i;u8 buf[6];u8 *val_p;__be32 val_be;if (len > 4)return -EINVAL;/* buf[0] = 高8位寄存器地址, buf[1] = 低8位寄存器地址 */buf[0] = reg >> 8;buf[1] = reg & 0xff;/* 把 val 转换为大端存储 */val_be = cpu_to_be32(val);val_p = (u8 *)&val_be;buf_i = 2; // 从 buf[2] 开始放数据val_i = 4 - len; // 计算需要拷贝的起始位置/* 把数据按字节复制到 buf 里 */while (val_i < 4)buf[buf_i++] = val_p[val_i++];/* 通过 i2c 发送 (寄存器地址 + 数据) */if (i2c_master_send(client, buf, len + 2) != len + 2)return -EIO;return 0;
}
👉 通俗理解:
这个函数就是往某个寄存器写值。摄像头芯片都是通过 I²C 寄存器控制的,比如 0x0100 = 0x01 代表开始输出视频流。
再看 启动视频流:
static int __ov02k10_start_stream(struct ov02k10 *ov02k10)
{int ret;/* 1. 写入全局初始化寄存器 */ret = ov02k10_write_array(ov02k10->client, ov02k10_global_regs);/* 2. 写入当前分辨率模式寄存器(比如1080p HDR/线性) */ret = ov02k10_write_array(ov02k10->client, ov02k10->cur_mode->reg_list);/* 3. 初始化转换增益模式 */ret = ov02k10_init_conversion_gain(ov02k10);/* 4. 应用用户设置的曝光/增益等控制参数 */ret = __v4l2_ctrl_handler_setup(&ov02k10->ctrl_handler);/* 5. 最后写 0x0100 = 0x01,让摄像头开始工作 */return ov02k10_write_reg(ov02k10->client, OV02K10_REG_CTRL_MODE,OV02K10_REG_VALUE_08BIT, OV02K10_MODE_STREAMING);
}
👉 通俗理解:
- 给摄像头上电并复位
- 写入初始化寄存器配置
- 写入分辨率/模式参数
- 设置曝光、增益等初始值
- 让摄像头真正开始输出图像数据
📚 你可以这样理解
-
这个驱动就是摄像头和 Linux V4L2 框架之间的“翻译器”
应用层说:“我要 1080p30 帧的图像”,驱动就会转成寄存器写入,把 OV02K10 芯片配置到 1080p30 输出。 -
V4L2 控件(control)= 摄像头功能开关
- 曝光 (exposure)
- 模拟增益 (analog gain)
- 翻转 (flip)
- 测试图案 (test pattern)
-
电源管理:当摄像头不用时,驱动会关电源/时钟,省电。
要不要我帮你把整个 struct ov02k10 和核心几个函数加上详细的中文注释版代码(适合初学者对照学习)?这样你就能对照理解驱动的每一部分了。
好嘞 👍
既然你是 Linux 设备驱动初学者,我给你整理一个 详细中文注释版,从整体到局部逐步理解。
因为整个 ov02k10.c 文件太长,我会先挑出最关键的几个结构体和函数,写成“对照学习”风格的注释版代码。
① 驱动的核心结构体
/* * OV02K10 摄像头传感器的私有数据结构* 每个摄像头传感器在内核里都会用一个这样的 struct 保存运行时信息*/
struct ov02k10 {struct i2c_client *client; // I2C 设备指针,用来和摄像头芯片通信struct clk *xvclk; // 外部输入时钟 (24MHz)struct gpio_desc *power_gpio; // 电源控制 GPIOstruct gpio_desc *reset_gpio; // 复位 GPIOstruct gpio_desc *pwdn_gpio; // 电源关闭(Power Down) GPIOstruct regulator_bulk_data supplies[OV02K10_NUM_SUPPLIES]; // 电源管理 (avdd/dvdd/dovdd)struct pinctrl *pinctrl; // 引脚复用控制struct pinctrl_state *pins_default; // 默认引脚状态struct pinctrl_state *pins_sleep; // 休眠时引脚状态/* V4L2 子设备接口,用于和 Video4Linux 框架交互 */struct v4l2_subdev subdev; // V4L2 子设备struct media_pad pad; // 多媒体管道的 PADstruct v4l2_ctrl_handler ctrl_handler; // 控件管理器/* V4L2 控件对象 (相机功能接口) */struct v4l2_ctrl *exposure; // 曝光控制struct v4l2_ctrl *anal_gain; // 模拟增益struct v4l2_ctrl *digi_gain; // 数字增益struct v4l2_ctrl *hblank; // 行间隔 (horizontal blank)struct v4l2_ctrl *vblank; // 帧间隔 (vertical blank)struct v4l2_ctrl *test_pattern; // 测试图案struct v4l2_ctrl *pixel_rate; // 像素时钟速率struct v4l2_ctrl *link_freq; // MIPI 速率struct v4l2_ctrl *h_flip; // 水平翻转struct v4l2_ctrl *v_flip; // 垂直翻转struct mutex mutex; // 互斥锁,保证多线程安全bool streaming; // 当前是否在输出视频流bool power_on; // 电源是否开启const struct ov02k10_mode *cur_mode; // 当前工作模式 (分辨率/HDR 等)u32 cfg_num; // 模式数量u32 module_index; // 模块索引 (多摄时区分)const char *module_facing; // 前置/后置const char *module_name; // 模块名字const char *len_name; // 镜头名字/* HDR 曝光相关 */bool has_init_exp; struct preisp_hdrae_exp_s init_hdrae_exp;/* 增益模式控制 (HCG/LCG) */bool long_hcg;bool middle_hcg;bool short_hcg;u32 flip; // 翻转寄存器当前值
};
👉 通俗解释:
这个结构体就是摄像头对象,保存了摄像头的一切状态:电源、GPIO、时钟、分辨率、曝光、增益等。
② I²C 寄存器读写函数
/* 写寄存器 (支持 8/16/24 位数据) */
static int ov02k10_write_reg(struct i2c_client *client, u16 reg,u32 len, u32 val)
{u8 buf[6]; // I2C 发送缓冲__be32 val_be; // 大端字节序的值u8 *val_p;u32 buf_i, val_i;if (len > 4) // 最多支持 4 字节return -EINVAL;/* 1. 先写寄存器地址 (高 8 位 + 低 8 位) */buf[0] = reg >> 8;buf[1] = reg & 0xff;/* 2. 把 val 转换为大端字节序 */val_be = cpu_to_be32(val);val_p = (u8 *)&val_be;/* 3. 按照数据长度,把数据拷贝到 buf */buf_i = 2;val_i = 4 - len; // 确保对齐while (val_i < 4)buf[buf_i++] = val_p[val_i++];/* 4. 通过 I2C 发送 (寄存器地址 + 数据) */if (i2c_master_send(client, buf, len + 2) != len + 2)return -EIO;return 0;
}/* 读寄存器 (支持 8/16/24/32 位数据) */
static int ov02k10_read_reg(struct i2c_client *client,u16 reg, unsigned int len, u32 *val)
{struct i2c_msg msgs[2];__be16 reg_addr_be = cpu_to_be16(reg);__be32 data_be = 0;u8 *data_be_p = (u8 *)&data_be;int ret;if (len > 4 || !len)return -EINVAL;/* I2C 第一条消息: 写寄存器地址 */msgs[0].addr = client->addr;msgs[0].flags = 0; // 写操作msgs[0].len = 2;msgs[0].buf = (u8 *)®_addr_be;/* I2C 第二条消息: 读取寄存器值 */msgs[1].addr = client->addr;msgs[1].flags = I2C_M_RD; // 读操作msgs[1].len = len;msgs[1].buf = &data_be_p[4 - len];/* 执行 I2C 传输 */ret = i2c_transfer(client->adapter, msgs, ARRAY_SIZE(msgs));if (ret != ARRAY_SIZE(msgs))return -EIO;/* 转换成 CPU 字节序 */*val = be32_to_cpu(data_be);return 0;
}
👉 通俗解释:
write_reg就是“寄存器写入命令” →地址 + 数据read_reg就是“寄存器读取命令” → 先发地址,再读数据
③ 启动/停止视频流
/* 启动视频流 (开始输出图像) */
static int __ov02k10_start_stream(struct ov02k10 *ov02k10)
{int ret;/* 1. 写入全局初始化寄存器 (基础设置) */ret = ov02k10_write_array(ov02k10->client, ov02k10_global_regs);/* 2. 写入当前模式的寄存器 (分辨率/HDR 等) */ret = ov02k10_write_array(ov02k10->client, ov02k10->cur_mode->reg_list);/* 3. 初始化增益模式 (HCG/LCG) */ret = ov02k10_init_conversion_gain(ov02k10);/* 4. 应用用户设置的曝光/增益/翻转等控制参数 */ret = __v4l2_ctrl_handler_setup(&ov02k10->ctrl_handler);/* 5. 最后一步:写控制寄存器,让摄像头进入 Streaming 模式 */return ov02k10_write_reg(ov02k10->client, OV02K10_REG_CTRL_MODE,OV02K10_REG_VALUE_08BIT, OV02K10_MODE_STREAMING);
}/* 停止视频流 (进入待机) */
static int __ov02k10_stop_stream(struct ov02k10 *ov02k10)
{ov02k10->has_init_exp = false; // 清掉 HDR 初始曝光参数return ov02k10_write_reg(ov02k10->client, OV02K10_REG_CTRL_MODE,OV02K10_REG_VALUE_08BIT, OV02K10_MODE_SW_STANDBY);
}
👉 通俗解释:
- 启动流时:先写初始化寄存器,再写分辨率配置,最后打开“Streaming”开关。
- 停止流时:直接写待机模式。
④ 设置控制参数(例:曝光、翻转)
/* 设置 V4L2 控件 (应用层的请求 -> 写寄存器) */
static int ov02k10_set_ctrl(struct v4l2_ctrl *ctrl)
{struct ov02k10 *ov02k10 = container_of(ctrl->handler,struct ov02k10, ctrl_handler);struct i2c_client *client = ov02k10->client;int ret = 0;u32 val = 0;switch (ctrl->id) {case V4L2_CID_EXPOSURE: // 曝光时间ret = ov02k10_write_reg(client,OV02K10_REG_EXP_LONG_H,OV02K10_REG_VALUE_16BIT,ctrl->val);break;case V4L2_CID_ANALOGUE_GAIN: // 模拟增益ret = ov02k10_write_reg(client,OV02K10_REG_AGAIN_LONG_H,OV02K10_REG_VALUE_16BIT,(ctrl->val << 4) & 0xff0);break;case V4L2_CID_TEST_PATTERN: // 测试图案 (彩条)ret = ov02k10_enable_test_pattern(ov02k10, ctrl->val);break;case V4L2_CID_HFLIP: // 水平翻转ov02k10_read_reg(client, OV02K10_FLIP_REG,OV02K10_REG_VALUE_08BIT, &val);if (ctrl->val)val |= MIRROR_BIT_MASK;elseval &= ~MIRROR_BIT_MASK;ret = ov02k10_write_reg(client, OV02K10_FLIP_REG,OV02K10_REG_VALUE_08BIT, val);break;case V4L2_CID_VFLIP: // 垂直翻转ov02k10_read_reg(client, OV02K10_FLIP_REG,OV02K10_REG_VALUE_08BIT, &val);if (ctrl->val)val |= FLIP_BIT_MASK;elseval &= ~FLIP_BIT_MASK;ret = ov02k10_write_reg(client, OV02K10_FLIP_REG,OV02K10_REG_VALUE_08BIT, val);break;default:break;}return ret;
}
👉 通俗解释:
应用层用 v4l2-ctl 工具设置参数时,这里会被调用,把参数翻译成“寄存器写操作”。
总结
struct ov02k10→ 摄像头对象,保存运行状态- 寄存器读写函数 → I²C 通信基础
- 启动/停止视频流 → 初始化寄存器 → 开关输出
- V4L2 控件 → 曝光、增益、翻转、测试图案
要不要我把这个完整驱动里的 电源管理部分(上电/下电流程) 也加上详细中文注释?这样你就能完整掌握“驱动初始化 → 上电 → 配置寄存器 → 开始输出”的全流程。
👌 好的,那我就帮你把 OV02K10 驱动的全流程(含电源管理) 都整理成详细中文注释版。
我会分成几个大块来写,保证你能从头到尾看懂一个摄像头驱动的运行过程。
🔹 1. 电源管理(Power On/Off)
/* 上电函数:打开电源、时钟、复位等 */
static int __ov02k10_power_on(struct ov02k10 *ov02k10)
{int ret;u32 delay_us;struct device *dev = &ov02k10->client->dev;/* 1. 设置引脚为默认功能 */if (!IS_ERR_OR_NULL(ov02k10->pins_default)) {ret = pinctrl_select_state(ov02k10->pinctrl, ov02k10->pins_default);if (ret < 0)dev_err(dev, "无法设置默认引脚状态\n");}/* 2. 设置外部输入时钟为 24MHz */ret = clk_set_rate(ov02k10->xvclk, OV02K10_XVCLK_FREQ);if (ret < 0)dev_warn(dev, "设置 xvclk 频率失败 (应该是 24MHz)\n");/* 3. 打开时钟 */ret = clk_prepare_enable(ov02k10->xvclk);if (ret < 0) {dev_err(dev, "开启 xvclk 时钟失败\n");return ret;}/* 4. 拉低 reset 脚 */if (!IS_ERR(ov02k10->reset_gpio))gpiod_set_value_cansleep(ov02k10->reset_gpio, 0);/* 5. 打开电源 GPIO */if (!IS_ERR(ov02k10->power_gpio)) {gpiod_set_value_cansleep(ov02k10->power_gpio, 1);usleep_range(5000, 5100); // 延时 5ms}/* 6. 使能摄像头的电源供电 (avdd/dvdd/dovdd) */ret = regulator_bulk_enable(OV02K10_NUM_SUPPLIES, ov02k10->supplies);if (ret < 0) {dev_err(dev, "电源稳压器使能失败\n");goto disable_clk;}/* 7. 拉高 reset 脚 */if (!IS_ERR(ov02k10->reset_gpio))gpiod_set_value_cansleep(ov02k10->reset_gpio, 1);usleep_range(500, 1000);/* 8. 拉高 pwdn (Power Down) 脚 */if (!IS_ERR(ov02k10->pwdn_gpio))gpiod_set_value_cansleep(ov02k10->pwdn_gpio, 1);usleep_range(12000, 16000);/* 9. 按数据手册要求,等待 8192 个时钟周期后才能访问寄存器 */delay_us = ov02k10_cal_delay(8192);usleep_range(delay_us, delay_us * 2);return 0;disable_clk:clk_disable_unprepare(ov02k10->xvclk);return ret;
}/* 下电函数:关闭电源、时钟、复位等 */
static void __ov02k10_power_off(struct ov02k10 *ov02k10)
{int ret;struct device *dev = &ov02k10->client->dev;/* 1. 拉低 pwdn 脚 */if (!IS_ERR(ov02k10->pwdn_gpio))gpiod_set_value_cansleep(ov02k10->pwdn_gpio, 0);/* 2. 关闭时钟 */clk_disable_unprepare(ov02k10->xvclk);/* 3. 拉低 reset 脚 */if (!IS_ERR(ov02k10->reset_gpio))gpiod_set_value_cansleep(ov02k10->reset_gpio, 0);/* 4. 设置引脚为 sleep 状态 */if (!IS_ERR_OR_NULL(ov02k10->pins_sleep)) {ret = pinctrl_select_state(ov02k10->pinctrl, ov02k10->pins_sleep);if (ret < 0)dev_dbg(dev, "无法设置 sleep 引脚状态\n");}/* 5. 关闭电源供电 */regulator_bulk_disable(OV02K10_NUM_SUPPLIES, ov02k10->supplies);
}
👉 通俗解释:
- 上电时:顺序必须正确 → 配置引脚 → 打开时钟 → 打开电源 → 拉高 reset → 延时 → 可以用 I²C 访问。
- 下电时:反着来 → 关掉电源/时钟,拉低 reset/pwdn。
🔹 2. 开始/停止视频流
/* 开始视频流 */
static int __ov02k10_start_stream(struct ov02k10 *ov02k10)
{int ret;/* 1. 写全局初始化寄存器 (基本配置) */ret = ov02k10_write_array(ov02k10->client, ov02k10_global_regs);if (ret) {dev_err(&ov02k10->client->dev, "写全局寄存器失败\n");return ret;}/* 2. 写当前分辨率/模式的寄存器 */ret = ov02k10_write_array(ov02k10->client, ov02k10->cur_mode->reg_list);if (ret)return ret;/* 3. 初始化转换增益模式 */ret = ov02k10_init_conversion_gain(ov02k10);if (ret)return ret;/* 4. 应用 V4L2 控件设置 (比如曝光、增益、翻转) */ret = __v4l2_ctrl_handler_setup(&ov02k10->ctrl_handler);if (ret)return ret;/* 5. 如果是 HDR 模式,还需要写入初始曝光值 */if (ov02k10->has_init_exp && ov02k10->cur_mode->hdr_mode != NO_HDR) {ret = ov02k10_ioctl(&ov02k10->subdev,PREISP_CMD_SET_HDRAE_EXP,&ov02k10->init_hdrae_exp);if (ret) {dev_err(&ov02k10->client->dev, "HDR 初始化曝光失败\n");return ret;}}/* 6. 最后一步:写寄存器 0x0100=0x01 进入 Streaming 模式 */return ov02k10_write_reg(ov02k10->client, OV02K10_REG_CTRL_MODE,OV02K10_REG_VALUE_08BIT, OV02K10_MODE_STREAMING);
}/* 停止视频流 */
static int __ov02k10_stop_stream(struct ov02k10 *ov02k10)
{/* 清掉 HDR 初始曝光 */ov02k10->has_init_exp = false;/* 写寄存器 0x0100=0x00 进入待机模式 */return ov02k10_write_reg(ov02k10->client, OV02K10_REG_CTRL_MODE,OV02K10_REG_VALUE_08BIT, OV02K10_MODE_SW_STANDBY);
}
👉 通俗解释:
- Start:写初始化 → 写模式寄存器 → 设置增益 → 应用控件 → Streaming
- Stop:写待机模式
🔹 3. V4L2 控件(曝光/增益/翻转等)
/* 设置 V4L2 控件 */
static int ov02k10_set_ctrl(struct v4l2_ctrl *ctrl)
{struct ov02k10 *ov02k10 = container_of(ctrl->handler,struct ov02k10, ctrl_handler);struct i2c_client *client = ov02k10->client;int ret = 0;u32 val = 0;switch (ctrl->id) {case V4L2_CID_EXPOSURE: // 曝光ret = ov02k10_write_reg(client,OV02K10_REG_EXP_LONG_H,OV02K10_REG_VALUE_16BIT,ctrl->val);break;case V4L2_CID_ANALOGUE_GAIN: // 模拟增益ret = ov02k10_write_reg(client,OV02K10_REG_AGAIN_LONG_H,OV02K10_REG_VALUE_16BIT,(ctrl->val << 4) & 0xff0);break;case V4L2_CID_VBLANK: // 垂直 blankret = ov02k10_write_reg(client, OV02K10_REG_VTS,OV02K10_REG_VALUE_16BIT,ctrl->val + ov02k10->cur_mode->height);break;case V4L2_CID_TEST_PATTERN: // 测试图案ret = ov02k10_enable_test_pattern(ov02k10, ctrl->val);break;case V4L2_CID_HFLIP: // 水平翻转ov02k10_read_reg(client, OV02K10_FLIP_REG,OV02K10_REG_VALUE_08BIT, &val);if (ctrl->val)val |= MIRROR_BIT_MASK;elseval &= ~MIRROR_BIT_MASK;ret = ov02k10_write_reg(client, OV02K10_FLIP_REG,OV02K10_REG_VALUE_08BIT, val);break;case V4L2_CID_VFLIP: // 垂直翻转ov02k10_read_reg(client, OV02K10_FLIP_REG,OV02K10_REG_VALUE_08BIT, &val);if (ctrl->val)val |= FLIP_BIT_MASK;elseval &= ~FLIP_BIT_MASK;ret = ov02k10_write_reg(client, OV02K10_FLIP_REG,OV02K10_REG_VALUE_08BIT, val);break;default:break;}return ret;
}
👉 通俗解释:
应用层通过 v4l2-ctl 或 OpenCV 调用接口 → 驱动会执行 ov02k10_set_ctrl → 最终变成对寄存器的写操作。
🔹 4. V4L2 接口绑定
最后,驱动需要把这些函数和 V4L2 框架绑定起来:
/* V4L2 子设备操作集 */
static const struct v4l2_subdev_core_ops ov02k10_core_ops = {.s_power = ov02k10_s_power, // 电源控制.ioctl = ov02k10_ioctl, // 特殊命令
};static const struct v4l2_subdev_video_ops ov02k10_video_ops = {.s_stream = ov02k10_s_stream, // 开始/停止视频流.g_frame_interval = ov02k10_g_frame_interval, // 获取帧率
};static const struct v4l2_subdev_pad_ops ov02k10_pad_ops = {.enum_mbus_code = ov02k10_enum_mbus_code, // 枚举像素格式.enum_frame_size = ov02k10_enum_frame_sizes,// 枚举分辨率.get_fmt = ov02k10_get_fmt, // 获取格式.set_fmt = ov02k10_set_fmt, // 设置格式
};static const struct v4l2_subdev_ops ov02k10_subdev_ops = {.core = &ov02k10_core_ops,.video = &ov02k10_video_ops,.pad = &ov02k10_pad_ops,
};
👉 通俗解释:
这样一来,应用层请求 V4L2 接口时(比如 VIDIOC_S_FMT 设置分辨率),就会调用这些函数,最终驱动去写寄存器。
🌟 总结学习路径
- 电源管理:先学会如何给设备上电/下电(GPIO、时钟、稳压器)
- 寄存器操作:学会 I²C 读写寄存器,驱动的基本功
- 视频流控制:如何初始化寄存器,启动/停止输出
- 控件接口:V4L2 的曝光、增益、翻转等怎么对应寄存器
- 绑定 V4L2:驱动如何把这些函数挂接到 V4L2 框架
这样你就能完整看懂一个摄像头驱动的工作原理啦 🚀
要不要我再给你画一个 流程图(从应用层 → V4L2 → 驱动 → I²C → 摄像头寄存器)?这样你一眼就能看懂整个调用链。
这是 摄像头驱动调用链流程图:
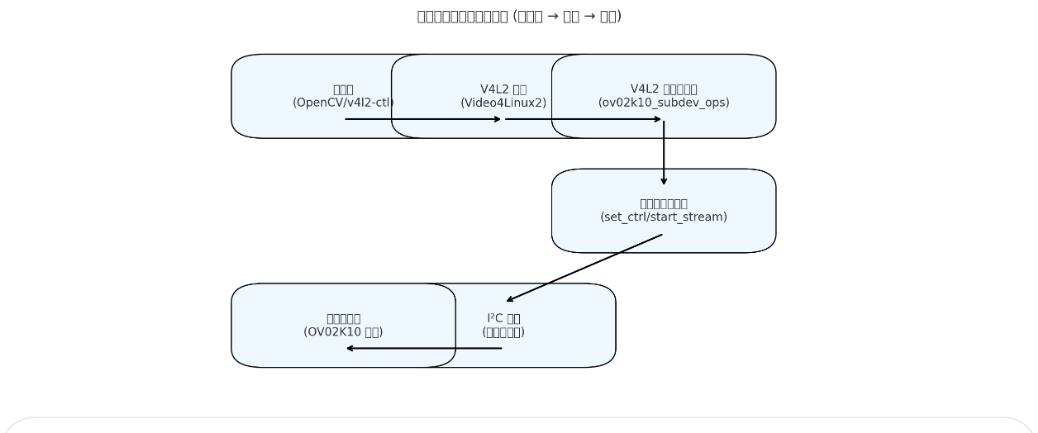
应用层 (OpenCV/v4l2-ctl) → V4L2 框架 → 驱动接口 → I²C → 摄像头芯片。
它清楚展示了应用程序如何通过 V4L2 框架一步步下发命令,最终变成 I²C 的寄存器读写操作。
要不要我再给你做一个 上电/初始化/开始采集 的时序图?这样能看懂摄像头从“黑屏”到“有图像”的完整过程。
这是 摄像头上电 → 初始化寄存器 → 开始采集 的时序图 📊
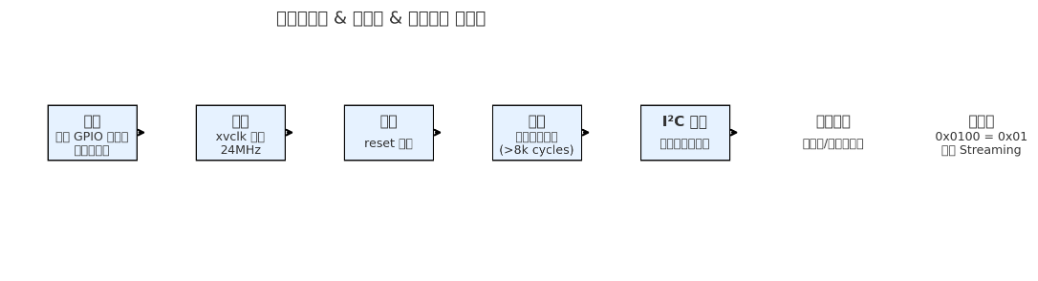
流程是:
- 上电(GPIO/电源稳压器)
- 打开时钟(24MHz)
- 拉高复位
- 延时等待芯片稳定
- I²C 写入初始化寄存器
- 设置分辨率/帧率模式
- 写寄存器
0x0100=0x01→ 开始输出视频流
要不要我再帮你整理一个 驱动学习速查表(寄存器操作 / V4L2 控件 / 上电流程 / 调试命令),方便你边写驱动边查?
太好了👌 我帮你整理一个 Linux 摄像头驱动学习速查表,适合初学者边学边查。
📌 Linux 摄像头驱动学习速查表(OV02K10 例子)
1️⃣ 驱动核心知识点
- 驱动类型:V4L2 子设备驱动(v4l2-subdev)
- 总线接口:I²C(读写寄存器控制摄像头)
- 视频数据接口:MIPI CSI-2
- 框架:应用层 → V4L2 框架 → 驱动 → I²C → 摄像头芯片
2️⃣ 电源/时钟管理
-
上电步骤(必须顺序正确):
- 配置引脚状态(pinctrl)
- 打开时钟
xvclk(一般 24MHz) - 使能电源
avdd/dvdd/dovdd - 拉高 reset 脚
- 拉高 pwdn 脚(Power Down 解除)
- 延时等待芯片稳定
- 通过 I²C 配置寄存器
-
关键寄存器:
0x0100 = 0x00→ Standby(待机)0x0100 = 0x01→ Streaming(开始输出)
3️⃣ I²C 读写寄存器
驱动函数:
ov02k10_write_reg(client, reg_addr, len, value);
ov02k10_read_reg(client, reg_addr, len, &value);
调试工具:
# 读取芯片 ID
i2cdump -y 1 0x36 # 0x36 是 i2c 地址
i2cget -y 1 0x36 0x300a w # 读取寄存器 0x300a
4️⃣ V4L2 控件(常用功能)
驱动里 ov02k10_set_ctrl() 对应功能 → I²C 写寄存器
| 控件 | 寄存器 | 功能 |
|---|---|---|
V4L2_CID_EXPOSURE | 0x3500~0x3502 | 曝光时间 |
V4L2_CID_ANALOGUE_GAIN | 0x3508~0x3509 | 模拟增益 |
V4L2_CID_VBLANK | 0x380e~0x380f | 行时长(帧率控制) |
V4L2_CID_TEST_PATTERN | 专用寄存器 | 测试图案 |
V4L2_CID_HFLIP | 0x3821[1] | 水平镜像 |
V4L2_CID_VFLIP | 0x3820[1] | 垂直翻转 |
5️⃣ 调试命令
# 枚举设备
v4l2-ctl --list-devices# 查看支持的视频格式
v4l2-ctl --list-formats-ext -d /dev/video0# 设置分辨率、帧率
v4l2-ctl --set-fmt-video=width=1920,height=1080,pixelformat=UYVY -d /dev/video0
v4l2-ctl --set-parm=30 -d /dev/video0# 设置曝光
v4l2-ctl --set-ctrl=exposure=100 -d /dev/video0# 设置增益
v4l2-ctl --set-ctrl=analogue_gain=4 -d /dev/video0# 打开测试图案
v4l2-ctl --set-ctrl=test_pattern=1 -d /dev/video0
6️⃣ 驱动学习路径建议
- 先看上电流程:掌握电源 + GPIO + 时钟初始化
- 学寄存器操作:I²C 读写函数
- 看流控:Start/Stop stream 函数
- 学 V4L2 控件:对应到寄存器
- 调试命令:用
v4l2-ctl实际改参数,看图像变化
📖 这个速查表相当于你写/改摄像头驱动时的 最小工具包。
要不要我帮你做一个 “寄存器操作 vs V4L2 控件”的对照表格(含具体寄存器地址 + bit 含义)?这样调试时就能快速找到该改哪个寄存器。
好👌 我来给你整理一个 V4L2 控件 ↔ 摄像头寄存器 对照表(以 OV02K10 为例,部分寄存器跟 OV 系列相机类似),这样你调试时能直接知道 控件对应的寄存器地址/位含义。
📌 V4L2 控件 ↔ OV02K10 寄存器对照表
| V4L2 控件 | 作用 | 关键寄存器 | 位定义/说明 |
|---|---|---|---|
V4L2_CID_EXPOSURE | 曝光时间 (shutter) | 0x3500 (高 4 bit) 0x3501 (中 8 bit) 0x3502 (低 8 bit) | 20bit 曝光值,单位为行(line)。Exposure = (Reg[19:0]) |
V4L2_CID_ANALOGUE_GAIN | 模拟增益 | 0x3508 (高 4 bit) 0x3509 (低 8 bit) | 12bit 增益,实际增益值 = Reg/16。 例: 0x0100 = 16/16 = 1x,0x0200=32/16=2x |
V4L2_CID_DIGITAL_GAIN | 数字增益 | 0x350A~0x350D | 左右通道的数字增益,通常和 AE 一起调节 |
V4L2_CID_VBLANK | 垂直 blank(影响帧率) | 0x380e (高 8 bit) 0x380f (低 8 bit) | VTS (Vertical Total Size),总行数 = height + vblank |
V4L2_CID_HBLANK | 水平 blank | 0x380c (高 8 bit) 0x380d (低 8 bit) | HTS (Horizontal Total Size),总像素时钟 = width + hblank |
V4L2_CID_HFLIP | 水平镜像 | 0x3821[1] | 0 = 正常,1 = 镜像 |
V4L2_CID_VFLIP | 垂直翻转 | 0x3820[1] | 0 = 正常,1 = 翻转 |
V4L2_CID_TEST_PATTERN | 输出测试图案(彩条) | 0x5080 | bit[7:0] 控制测试模式开关,0=关闭,1=彩条 |
V4L2_CID_LINK_FREQ | MIPI 链路速率 | 0x0303、0x0305 等 PLL 配置寄存器 | 控制 MIPI lane 数据速率 |
V4L2_CID_PIXEL_RATE | 像素时钟速率 | 同上(PLL 寄存器组) | 驱动里根据模式计算,不直接改 |
V4L2_CID_POWER_LINE_FREQUENCY | 防止条纹 (50Hz/60Hz) | 0x3c01、0x3c00 | 控制自动防频闪 (Anti-Flicker) |
🔹 示例:设置曝光
# 设置曝光时间 (单位行)
v4l2-ctl --set-ctrl=exposure=500 -d /dev/video0
👉 实际上驱动会写入:
0x3500 = (500 >> 12) & 0x0F
0x3501 = (500 >> 4) & 0xFF
0x3502 = (500 & 0x0F) << 4
🔹 示例:开启水平翻转
# 开启水平翻转
v4l2-ctl --set-ctrl=horizontal_flip=1 -d /dev/video0
👉 实际寄存器:
0x3821 |= 0x06 # 设置 bit1=1
🔹 示例:打开测试图案
# 开启测试图案 (彩条)
v4l2-ctl --set-ctrl=test_pattern=1 -d /dev/video0
👉 实际寄存器:
0x5080 = 0x80 # 开启彩条模式
这样你就能 直接把 V4L2 控件映射到寄存器,方便调试时快速定位问题。
要不要我再帮你做一个 摄像头调试 checklist(排查没图像/花屏/帧率异常的步骤清单)?