采摘机器人设计cad+三维图+设计说明书
摘 要
柑橘是我国重要的经济作物之一,其采摘一直以来都是一个人力密集型、效率低下且劳动强度较大的工作。
柑橘采摘机器人是辅助自主完成柑橘采摘任务的有效手段,但目前采摘机器人还存在适用性不足、定位不准确、稳定性差、损伤果皮等问题。
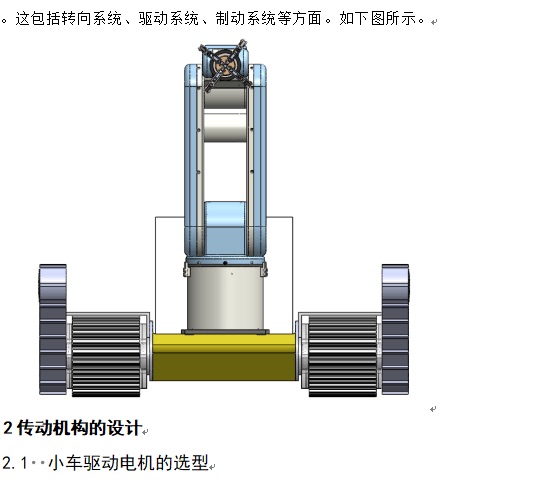
本文主要提出了一种自主柑橘采摘机器人的机械结构设计方案。该方案采用了履带汽车底盘、多轴机械臂和末端夹爪的结构,能够适应不同高度、角度和方向的柑橘采摘任务;在对功能模块结构设计基础上,进行了关键零部件的详细设计计算,并采用有限元分析方法对关键部件进行了优化设计。
本文所提柑橘采摘机器人对于优化柑橘采摘生产方式、提高采摘效率、减轻人力负担以及保证采摘品质等方面有一定的技术借鉴和应用价值。
关键词:机械臂;末端夹持机构;履带底盘
目录
第一章 绪论 1
1.1研究的背景及意义 1
1.2国内外研究现状 1
1.2.1国外的研究现状 2
1.2.2国内的研究现状 2
1.3采摘机器人的发展趋势 3
1.4本文主要的研究方法 4
1.5本文主要的研究方法 4
第二章 总体的设计方案 5
2.1设计的方法和原则 5
2.2 结构方案的选择 5
2.3 驱动方案的选择 7
2.4 传动方案的选择 8
2.5 本文的方案设计 10
2.6 本章小结 12
第三章 功能模块设计 24
3.1底盘的总体设计 13
3.2行走机构的设计 13
3.3齿轮的设计 16
3.4轴的设计和校核 18
3.5键的设计和校核 22
第四章 采摘机器人的机械臂设计 24
4.1机械臂的总体设计 24
4.2机械臂的传动设计 24
4.3末端夹持器的设计 25
第五章 采摘机器人的三维模型构建 26
5.1 solidworks 26
5.2 采摘机器人的三维模型 27
第六章 采摘机器人的有限元分析 29
6.1采摘机器人的有限元分析 29
6.2采摘机器人的材料选择 29
6.3采摘机器人的网格划分 30
6.4施加载荷 30
6.5后处理 30
6.6采摘机器人的工艺性分析 31
6.7本章小结 32
第七章 总结和展望 33
第一章 绪论
1.1研究的背景及意义
随着科学技术的进步,智能农业、果蔬采收等技术正逐渐取代传统的人工耕作,使农业生产发生了巨大的变化[1][2]。近几年来,随着电子学与电脑科技的快速发展,原本应用于工业领域的机器人也开始进入田间地头,并在农事上扮演着举足轻重的角色。现在,种植,除草都可以由机器人完成;采收、瓜果蔬菜的分拣等工作。据有关统计,因为人口老龄化和农村的青壮年都在去城市打工,从事农业方面的工作的人数在下降,而农业生产也逐渐规模化、多元化,劳动力也越来越短缺。在果园栽培中,只需摘果就需较多的人工,而在平常则不必,部分种植园很难招聘到充足的临时工。与此同时,部分临时工也会因为对这项工作不太熟悉,导致水果在采摘时受伤的可能性变大。有关数据显示:水果的采收成本在整个农业生产成本中所占比例超过40%,有些种植园的采收成本甚至高达50%。为此,本文研究了一种适用于我国果品生产的新型果品采摘机器人。水果收获机器人作为一种智能化、机械化、高精度的水果收获装备,可取代手工作业,实现水果采摘的自动化[3][4]。
柑橘果园是一项劳动密集型产业,尤其是在采收过程中,更是消耗了许多人力。但在我国,由于我国柑橘采收速度加快,造成了大量的“民工荒”,严重影响了柑橘产业的发展[5]。针对上述问题,开展基于机械臂的水果采摘机的研发与应用,有助于提升水果采摘机的收获率,降低工作人员的工作量。柑橘采摘是一个细致、复杂的过程,需要对果实进行精准、温和的处理,避免造成伤害或者损坏。对于传统的手工采摘而言,人工疲劳和误差都会影响采摘效率和果实品质。而采摘机器人能够通过智能算法和感知系统,精准地掌握每个果实的大小、成熟度等信息,快速而精准地完成采摘任务。柑橘采摘机器人可以通过自动化和智能化技术,实现对生产过程的全面监控和管理。相比传统模式下,由于采摘机器人可以按照预设路线进行采摘和管理,节省了人工和物流成本,减少了浪费。柑橘采摘机器人不仅解决了劳动力短缺问题,同时提高了采摘效率和品质,降低了生产成本[6][7]。这些优点也可以推广到其他农业领域中,带动整个农业智能化的发展,为现代农业创新提供支持和保障。
柑橘采摘机器人的研究意义重大,有望为农业生产提供更加高效、智能化的解决方案,进一步提高农业生产效率和质量,促进农业现代化水平的提升。
1.2国内外研究现状
1.2.1国外的研究现状
柑橘采摘机器人的研究在国外来说还是发展的非常不错,国外的很多知名的科学家都投身于机器人的研究和制造中,并且已经取得了一些列的成功,设计的采摘机器人也已经广泛的使用在很多的领域。
日本的柑橘采摘机器人技术比较先进,在2000年代初期就开始研发。目前,日本的柑橘采摘机器人大多基于GPS、LIDAR、摄像头等传感器进行定位和感知,并具备自主导航和避障能力。通过机械爪和视觉识别技术,可以实现对不同大小、形状的柑橘果实的精准采摘。此外,日本还在开展柑橘果实品质检测技术的研究,旨在提高采摘效率和果实品质[8][9][10]。
美国的柑橘采摘机器人主要集中在佛罗里达州等柑橘种植区域。当前,美国的柑橘采摘机器人技术主要包括移动机器人平台、计算机视觉算法和机器学习算法等方面。其中,机器视觉技术主要用于检测柑橘果实的位置、大小和成熟度等信息,从而实现自动化采摘。此外,美国还在研究如何优化柑橘果实的品质和运输方式。
这是英国Silsoe研究院研发出来的一款智能采集设备,它可以自动识别出菌株的大小和分布,并根据菌株的生长情况,进行针对性的剪枝和采收。不过,机器人的运动部分是空气动力,转动部分是电动机,结构很简单,造价也不高。因为长出来的菌菇会发生倾斜,所以机器人采集菌菇的几率只有75%,采集速率是每秒6.7个。
欧洲的柑橘采摘机器人技术相对较为落后,但也有一些相关的研究成果。其中,西班牙是欧洲柑橘种植业比较发达的地区之一,该国的柑橘采摘机器人主要基于机器视觉、传感器和控制器等技术,可以实现对不同大小和形状的柑橘果实的自动化采摘。此外,欧洲还在开展柑橘果实品质监测和采摘机器人智能控制系统的研究。国外设计的采摘机器人如下图1.1所示。
图1.1 国外的研究现状
目前国外的柑橘采摘机器人研究主要集中在机器视觉、传感器、自主导航和机器学习等方面,旨在提高采摘效率和果实品质。随着技术的不断进步和创新,未来柑橘采摘机器人将会更加智能化、高效化和精准化[11]。
1.2.2.国内的研究现状
目前国内柑橘采摘机器人的技术路线主要分为两种:基于视觉的定位和基于激光雷达的定位。基于视觉的定位主要是通过图像识别技术实现柑橘的定位和采摘;而基于激光雷达的定位则是利用激光雷达技术获取柑橘树的三维形态信息,进而实现机器人的定位和采摘。其中,机器人的自主导航技术、柑橘采摘定位技术、机器人操作手臂设计和控制技术等是研究中的重点和难点。
农业机器人是90年代中期以后开始进行的,与国际上的领先技术
本人从事十多年模具设计师与模具制造 模具设计、高级工程师本人设计CAD 二维工程图 三维工程图 产品设计 逆向建模 51单片机 STM32 单片机 代码 实物 原理 v2v9v9v1v2v9v3v1v9v6vvvv