【无人机三维路径规划】基于遗传算法GA结合粒子群算法PSO无人机复杂环境避障三维路径规划(含GA和PSO对比)研究
赠读者:正在埋头科研的你,或许有时你会困惑于 “投入” 与 “回报” 的时差,会疲惫于 “未知” 与 “确定” 的博弈,但请记得:那些看似 “无用” 的试错,都是在为突破搭建阶梯;那些独自深耕的日夜,都在悄悄为你铺垫抵达真理的路径。科研的意义,从不止于最终的论文与专利,更在于你用耐心打磨细节、用努力对抗难题的过程里,对未知的探索、对领域的推动,以及对自我价值的成全。
愿你在每一次探索中,都能守住耐心的温度,保持努力的力度,终会在自己深耕的领域里,等到属于你的那份 “柳暗花明”,让每一份坚持,都成为照亮学科前路的微光。
目录
一、综合概括
二、不同算法的优缺点分析
(一)遗传算法(GA)
(二)基本粒子群算法(PSO)
(三)改进的粒子群算法(GAPSO)
三、运行结果
下载链接
一、综合概括
在无人机路径规划领域,遗传算法(GA)、基本粒子群算法(PSO)及改进的粒子群算法(GAPSO)均属于群体智能优化算法,核心目标是在复杂环境(含障碍物、多约束条件)下,寻找满足避障、路径最短、能耗最低等需求的最优飞行路径。其中,GA 以自然选择与遗传进化为核心逻辑,PSO 模拟鸟群捕食的群体协作行为,二者各有优势却也存在明显短板;而 GAPSO 作为改进算法,通过融合 GA 的部分特性与 PSO 的核心机制,同时引入动态调整、多策略初始化等优化策略,在全局搜索能力、收敛速度、解的质量等关键性能指标上实现了突破,有效弥补了传统算法的不足,成为应对复杂无人机路径规划场景的更优选择,但也因策略复杂度提升带来了计算成本略微增加的问题。三种算法的选择需结合具体场景的约束条件(如计算资源、路径精度要求、环境动态性)综合判断,共同构成了无人机路径规划的重要算法体系。
二、不同算法的优缺点分析
(一)遗传算法(GA)
- 优点
- 复杂问题适配性强:基于 “选择 - 交叉 - 变异” 的进化机制,能够有效处理多约束、高维度的无人机路径规划问题,尤其在环境障碍物分布复杂、路径约束条件多样(如多目标点、多飞行高度限制)的场景中,仍能维持种群多样性,具备较强的全局搜索基础。
- 鲁棒性较好:对初始种群的依赖性相对较低,即使初始解质量不高,也可通过多代进化逐步逼近较优解,在环境参数小幅波动的静态场景中,能保持稳定的优化性能。
- 缺点
- 收敛速度慢:进化过程需经历多代种群迭代,且交叉、变异操作存在一定随机性,导致算法收敛效率较低,在需要快速生成路径的无人机实时规划场景(如应急救援、动态避障)中适应性较差。
- 局部搜索能力弱:算法更侧重全局范围内的解探索,对已找到的较优解周边区域的精细化搜索不足,容易在接近全局最优解时陷入 “停滞”,难以进一步优化路径精度(如缩短路径长度、降低能耗)。
(二)基本粒子群算法(PSO)
- 优点
- 实现简单高效:核心逻辑基于粒子对 “个体最优” 与 “群体最优” 的追踪,无需复杂的选择、交叉操作,代码实现难度低,且单次迭代计算量小,在简单环境(如少障碍物、单目标点)的路径规划中能快速收敛。
- 局部搜索能力突出:粒子通过速度 - 位置更新公式不断向最优解靠近,对已探索区域的局部优化能力强,在路径初始解较优的场景下,能快速微调路径以满足更精细的约束(如能耗最小化)。
- 缺点
- 易陷入局部最优:算法过度依赖 “群体最优” 的引导,当种群初期陷入局部较优解时,后续粒子易跟随聚集,难以跳出局部区域探索全局最优路径,尤其在障碍物密集、环境结构复杂的场景中表现明显。
- 鲁棒性不足:对初始粒子群的分布较为敏感,若初始粒子集中在非优区域,算法收敛效率会大幅下降;同时,在动态环境(如障碍物移动)中,难以快速调整搜索方向,路径更新适应性差。
(三)改进的粒子群算法(GAPSO)
- 优点
- 全局搜索与收敛速度平衡优:通过引入多策略混合初始化(提升初始种群多样性)、动态调整速度 - 位置公式(避免过早聚集)、融合局部搜索策略(强化精细优化),既弥补了 PSO 局部最优的缺陷,又改善了 GA 收敛慢的问题,在复杂环境中能高效探索全局最优路径。
- 解的质量与鲁棒性双高:多策略融合使算法在不同场景(静态 / 动态、少 / 多障碍物)中均能保持稳定性能,生成的路径不仅满足避障、路径最短等基础需求,还能更好地平衡能耗、飞行时间等多目标约束,解的综合质量优于 GA 与基本 PSO。
- 缺点
- 计算复杂度略高:相比基本 PSO 的简单迭代的简单迭代与 GA 的固定进化流程,GAPSO 的动态调整策略、多策略融合逻辑增加了单次迭代的计算量,对硬件计算资源(如处理器性能、内存)有一定要求,在资源受限的小型无人机上应用时需进行代码优化。
- 参数调优难度增加:算法包含多个可调参数(如动态调整系数、局部搜索触发阈值),不同场景下需针对性调整参数以达到最优性能,参数调优的复杂度高于传统 GA 与基本 PSO,增加了实际应用中的调试成本。
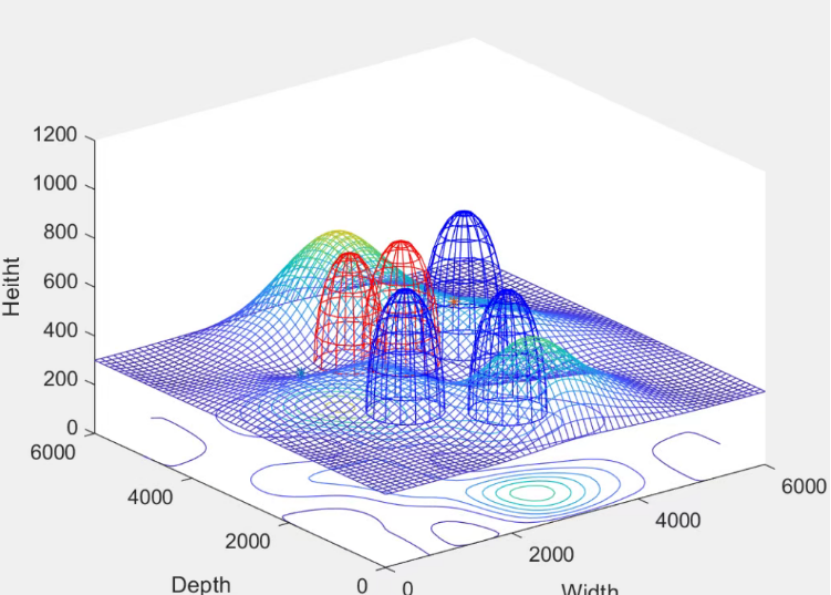
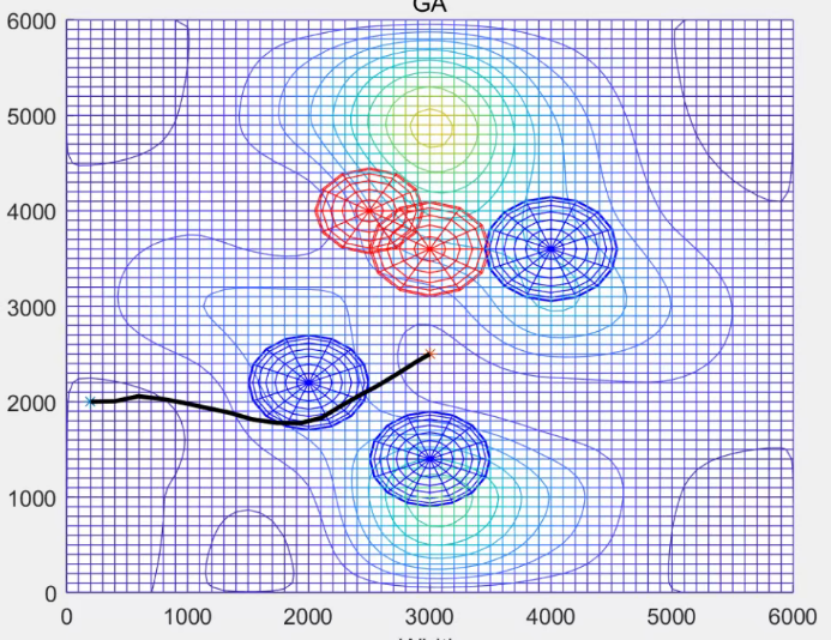
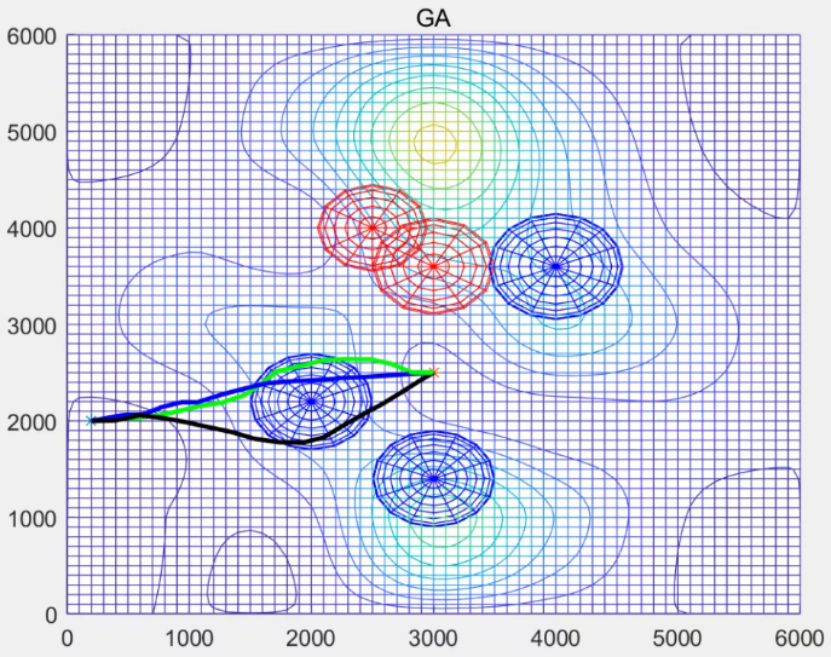
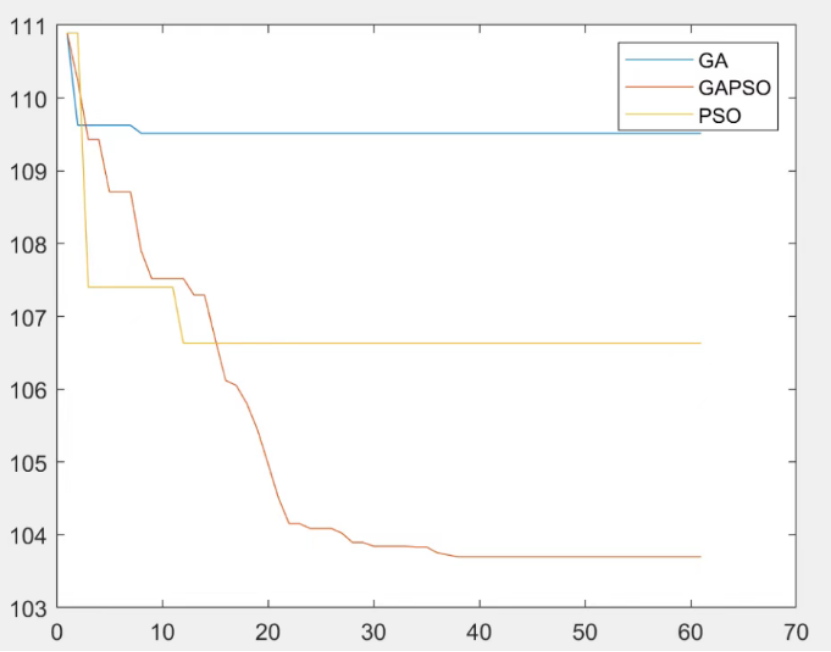
三、运行结果