Zynq中级开发七项必修课-第四课:S_AXI_HP0 高速端口访问 DDR
Zynq中级开发七项必修课-第四课:S_AXI_HP0 高速端口访问 DDR
和第三课的内容基本一致,只是把S_AXI_GP0 替换为S_AXI_HP0,
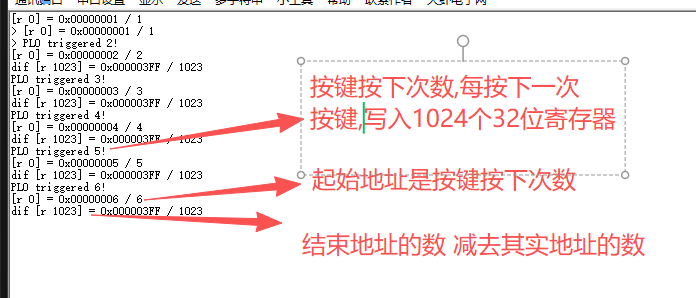
每按下一次按键,就把按键按下的次数m,m+1,…m+1023
写入ddr中,中断里读取0号寄存器和1023号寄存器,
1023号寄存器的值减去0号寄存器的值是1023,则测试成功
目标
- 1.0 编写 AXI-FULL Master:按键计数 → 写入 PS 内存
- 1.1 PL 触发中断 → PS 响应并串口打印按键计数值
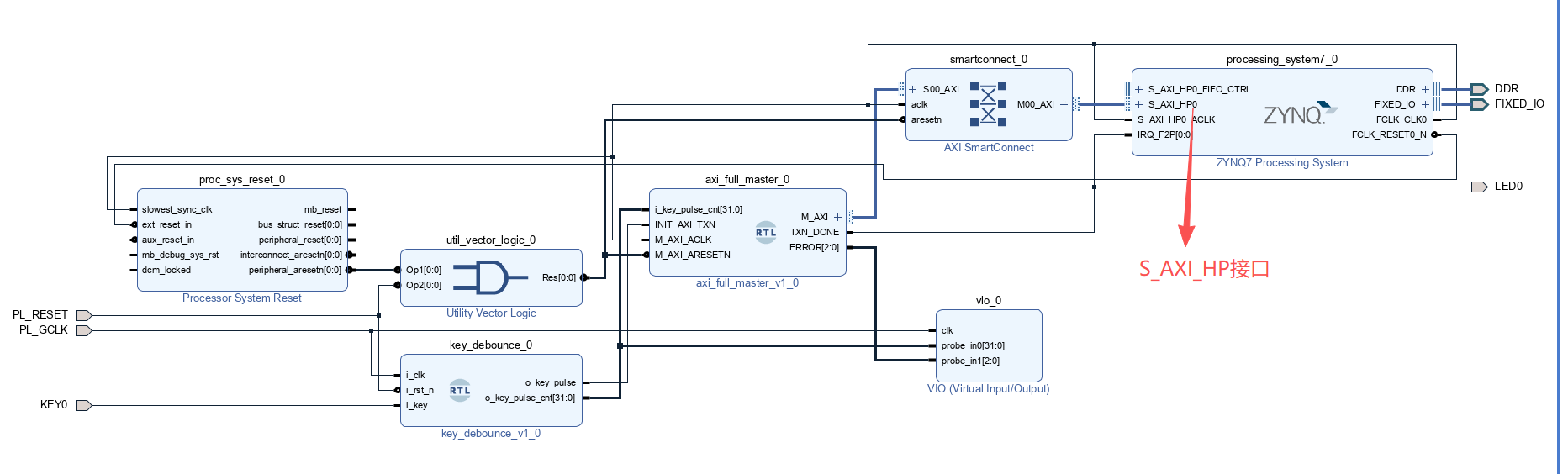
BD图
axi_full_master 引入了手动复位
因为 AXI_Full_MASTER 接口可以与 GP、HP、ACP 接口连接
这个BD 无论用哪个接口都可以,只是它们在 带宽, 突发支持,缓存一致性有差异
- 简单外设连 GP,不浪费高带宽资源;
- 高速数据传输用 HP,匹配其高吞吐量特性;
- 需要缓存一致性时才用 ACP,避免不必要的复杂性。
axi_full_master.v
在INIT_AXI_TXN的上升沿
把 i_key_pulse_cnt
i_key_pulse_cnt+1,
i_key_pulse_cnt+2,
…
i_key_pulse_cnt+1023
写入地址DDR中0x10000000 开始的 1024个32位寄存器中,
并读取校验后产生一个中断TXN_DONE
状态机流程
- 系统复位后,状态机处于IDLE 初始状态,等待外部输入的启动传输脉冲 init_txn_pulse。
- IDLE 状态下检测到 init_txn_pulse 为高电平,状态机跳转到 INIT_WRITE 状态。
- INIT_WRITE 状态下,状态机拉高 start_single_burst_write 信号,来不断地启动 AXI4 Master 接口对 Slave 端大小为 4KB 的存储空间进行突发写操作。写操作完成后,write_done 信号会拉高,状态机进入 INIT_READ 状态。
- INIT_READ 状态下,状态机拉高 start_single_burst_read 信号,不断地启动 AXI4 Master 接口对 Slave 端同一存储空间进行突发读操作,同时将读出的数据与写入的数据进行对比。读操作完成后,read_done 信号拉高,状态机进入 INIT_COMPARE 状态。
- INIT_COMPARE 状态下,判断 AXI4 接口在读写过程中的是否发生错误,并将错误状态赋值给 ERROR 信号,然后将 compare_done 信号拉高,表示一次读写测试完成。最后跳转到 IDLE 状态,等待下一次读写操作的启动信号。
`timescale 1 ns / 1 ps
module axi_full_master #
(// 用户自定义参数在此添加// 用户参数结束// 请勿修改此行以下的参数// 目标从设备的基地址parameter C_M_TARGET_SLAVE_BASE_ADDR = 32'h40000000,// 突发长度。支持 1, 2, 4, 8, 16, 32, 64, 128, 256parameter integer C_M_AXI_BURST_LEN = 16,// 线程 ID 宽度parameter integer C_M_AXI_ID_WIDTH = 1,// 地址总线宽度parameter integer C_M_AXI_ADDR_WIDTH = 32,// 数据总线宽度parameter integer C_M_AXI_DATA_WIDTH = 32,// 写地址通道的用户位宽parameter integer C_M_AXI_AWUSER_WIDTH = 0,// 读地址通道的用户位宽parameter integer C_M_AXI_ARUSER_WIDTH = 0,// 写数据通道的用户位宽parameter integer C_M_AXI_WUSER_WIDTH = 0,// 读数据通道的用户位宽parameter integer C_M_AXI_RUSER_WIDTH = 0,// 写响应通道的用户位宽parameter integer C_M_AXI_BUSER_WIDTH = 0
)
(// 用户自定义端口在此添加//按键按下次数input[31:0] i_key_pulse_cnt,// 用户端口结束// 请勿修改此行以下的端口// 触发 AXI 事务input wire INIT_AXI_TXN,// 事务完成指示output wire TXN_DONE,// 检测到错误时拉高output reg[2:0] ERROR,// 全局时钟input wire M_AXI_ACLK,// 全局复位,低有效input wire M_AXI_ARESETN,// 写地址通道:IDoutput wire [C_M_AXI_ID_WIDTH-1 : 0] M_AXI_AWID,// 写地址通道:地址output wire [C_M_AXI_ADDR_WIDTH-1 : 0] M_AXI_AWADDR,// 写地址通道:突发长度(实际拍数 = LEN+1)output wire [7 : 0] M_AXI_AWLEN,// 写地址通道:每拍传输字节大小(以 2^SIZE 表示)output wire [2 : 0] M_AXI_AWSIZE,// 写地址通道:突发类型// 决定突发内部每拍地址的计算方式output wire [1 : 0] M_AXI_AWBURST,// 写地址通道:锁类型// 提供传输的原子性信息output wire M_AXI_AWLOCK,// 写地址通道:缓存属性// 指示事务在系统中的缓存/缓冲语义output wire [3 : 0] M_AXI_AWCACHE,// 写地址通道:保护属性// 指示权限、安全等级、指令/数据访问output wire [2 : 0] M_AXI_AWPROT,// 写地址通道:服务质量 QoSoutput wire [3 : 0] M_AXI_AWQOS,// 写地址通道:可选用户自定义信号output wire [C_M_AXI_AWUSER_WIDTH-1 : 0] M_AXI_AWUSER,// 写地址通道:地址有效// 表示通道上提供了有效的写地址和控制信息output wire M_AXI_AWVALID,// 写地址通道:从设备准备好// 表示从设备准备好接收地址与控制input wire M_AXI_AWREADY,// 写数据通道:数据output wire [C_M_AXI_DATA_WIDTH-1 : 0] M_AXI_WDATA,// 写数据通道:字节选通// 指明哪些字节有效,每 8bit 一位output wire [C_M_AXI_DATA_WIDTH/8-1 : 0] M_AXI_WSTRB,// 写数据通道:突发最后一拍指示output wire M_AXI_WLAST,// 写数据通道:可选用户自定义信号output wire [C_M_AXI_WUSER_WIDTH-1 : 0] M_AXI_WUSER,// 写数据通道:数据有效// 表示有有效写数据与字节选通output wire M_AXI_WVALID,// 写数据通道:从设备可接收input wire M_AXI_WREADY,// 写响应通道:IDinput wire [C_M_AXI_ID_WIDTH-1 : 0] M_AXI_BID,// 写响应通道:响应码input wire [1 : 0] M_AXI_BRESP,// 写响应通道:可选用户自定义信号input wire [C_M_AXI_BUSER_WIDTH-1 : 0] M_AXI_BUSER,// 写响应通道:响应有效// 表示通道上有有效的写响应input wire M_AXI_BVALID,// 写响应通道:主设备准备好接收响应output wire M_AXI_BREADY,// 读地址通道:IDoutput wire [C_M_AXI_ID_WIDTH-1 : 0] M_AXI_ARID,// 读地址通道:起始地址output wire [C_M_AXI_ADDR_WIDTH-1 : 0] M_AXI_ARADDR,// 读地址通道:突发长度output wire [7 : 0] M_AXI_ARLEN,// 读地址通道:每拍传输大小(以 2^SIZE 表示)output wire [2 : 0] M_AXI_ARSIZE,// 读地址通道:突发类型// 决定突发内部每拍地址的计算方式output wire [1 : 0] M_AXI_ARBURST,// 读地址通道:锁类型// 提供传输的原子性信息output wire M_AXI_ARLOCK,// 读地址通道:缓存属性// 指示事务在系统中的缓存/缓冲语义output wire [3 : 0] M_AXI_ARCACHE,// 读地址通道:保护属性// 指示权限、安全等级、指令/数据访问output wire [2 : 0] M_AXI_ARPROT,// 读地址通道:服务质量 QoSoutput wire [3 : 0] M_AXI_ARQOS,// 读地址通道:可选用户自定义信号output wire [C_M_AXI_ARUSER_WIDTH-1 : 0] M_AXI_ARUSER,// 读地址通道:地址有效// 表示通道上提供了有效的读地址和控制信息output wire M_AXI_ARVALID,// 读地址通道:从设备准备好接收地址与控制input wire M_AXI_ARREADY,// 读数据通道:ID 标签// 由从设备返回,用于标识该组读数据input wire [C_M_AXI_ID_WIDTH-1 : 0] M_AXI_RID,// 读数据通道:数据input wire [C_M_AXI_DATA_WIDTH-1 : 0] M_AXI_RDATA,// 读数据通道:读响应码input wire [1 : 0] M_AXI_RRESP,// 读数据通道:突发最后一拍input wire M_AXI_RLAST,// 读数据通道:可选用户信号input wire [C_M_AXI_RUSER_WIDTH-1 : 0] M_AXI_RUSER,// 读数据通道:数据有效// 表示通道上有有效的读数据input wire M_AXI_RVALID,// 读数据通道:主设备准备好接收数据与响应output wire M_AXI_RREADY
);// 名为 clogb2 的函数,返回不小于 log2(bit_depth) 的整数
//(向上取整)// 名为 clogb2 的函数,返回不小于 log2(bit_depth) 的整数(向上取整)function integer clogb2 (input integer bit_depth);beginfor(clogb2=0; bit_depth>0; clogb2=clogb2+1)bit_depth = bit_depth >> 1;endendfunction// C_TRANSACTIONS_NUM 是写/读事务拍计数器的位宽localparam integer C_TRANSACTIONS_NUM = clogb2(C_M_AXI_BURST_LEN-1);// 以 C_M_AXI_DATA_WIDTH 为单位的突发长度。
// 非 2^n 的长度最终可能跨越 4K 地址边界。localparam integer C_MASTER_LENGTH = 12;
// 总的突发次数 = 2^C_MASTER_LENGTH 字节 / (每突发长度 * 每拍字节数) 的对数换算localparam integer C_NO_BURSTS_REQ = C_MASTER_LENGTH-clogb2((C_M_AXI_BURST_LEN*C_M_AXI_DATA_WIDTH/8)-1);
// 示例状态机:初始化计数器、写事务、读事务以及
// 用读回数据与写入数据进行比较。
parameter [1:0] IDLE = 2'b00, // 空闲状态,等待 INIT_AXI_TXN 由 0->1 触发INIT_WRITE = 2'b01, // 初始化写事务,完成后进入 INIT_READINIT_READ = 2'b10, // 初始化读事务,完成后进入 INIT_COMPAREINIT_COMPARE = 2'b11; // 比较已写与读回数据,并给出结果reg [1:0] mst_exec_state;// AXI4-Lite 信号(注:本例为 AXI4,以下为内部临时信号)
reg [C_M_AXI_ADDR_WIDTH-1 : 0] axi_awaddr;
reg axi_awvalid;
reg [C_M_AXI_DATA_WIDTH-1 : 0] axi_wdata;
reg axi_wlast;
reg axi_wvalid;
reg axi_bready;
reg [C_M_AXI_ADDR_WIDTH-1 : 0] axi_araddr;
reg axi_arvalid;
reg axi_rready;
// 写突发中的拍计数
reg [C_TRANSACTIONS_NUM : 0] write_index;
// 读突发中的拍计数
reg [C_TRANSACTIONS_NUM : 0] read_index;
// C_M_AXI_BURST_LEN 突发的一次传输对应的字节数
wire [C_TRANSACTIONS_NUM+2 : 0] burst_size_bytes;
// 突发计数器:记录完成 2^C_MASTER_LENGTH 字节传输所需的 C_M_AXI_BURST_LEN 次突发数量
reg [C_NO_BURSTS_REQ : 0] write_burst_counter;
reg [C_NO_BURSTS_REQ : 0] read_burst_counter;
reg start_single_burst_write;
reg start_single_burst_read;
reg writes_done;
reg reads_done;
reg error_reg;
reg compare_done;
reg read_mismatch;
reg burst_write_active;
reg burst_read_active;
reg [C_M_AXI_DATA_WIDTH-1 : 0] expected_rdata;
// 接口响应错误标志
wire write_resp_error;
wire read_resp_error;
wire wnext;
wire rnext;
reg init_txn_ff;
reg init_txn_ff2;
reg init_txn_edge;
wire init_txn_pulse;// I/O 连接赋值// 写地址(AW)通道
assign M_AXI_AWID = 'b0;
// AXI 地址 = 目标基地址 + 活动偏移地址
assign M_AXI_AWADDR = C_M_TARGET_SLAVE_BASE_ADDR + axi_awaddr;
// 突发长度(拍数-1)
assign M_AXI_AWLEN = C_M_AXI_BURST_LEN - 1;
// 传输大小应与数据宽匹配(否则会出现窄突发)
assign M_AXI_AWSIZE = clogb2((C_M_AXI_DATA_WIDTH/8)-1);
// 一般使用 INCR 类型突发(除非使用 keyhole)
assign M_AXI_AWBURST = 2'b01;
assign M_AXI_AWLOCK = 1'b0;
// 若经 Zynq ACP 进行一致性访问可设为 4'b0011。
// 此处设置为 4'b0010:不分配、可修改、不可缓冲(用于内存测试而非缓存)
assign M_AXI_AWCACHE = 4'b0010;
assign M_AXI_AWPROT = 3'h0;
assign M_AXI_AWQOS = 4'h0;
assign M_AXI_AWUSER = 'b1;
assign M_AXI_AWVALID = axi_awvalid;
// 写数据(W)通道
assign M_AXI_WDATA = axi_wdata;
// 本例所有突发按对齐、全字节写
assign M_AXI_WSTRB = {(C_M_AXI_DATA_WIDTH/8){1'b1}};
assign M_AXI_WLAST = axi_wlast;
assign M_AXI_WUSER = 'b0;
assign M_AXI_WVALID = axi_wvalid;
// 写响应(B)通道
assign M_AXI_BREADY = axi_bready;
// 读地址(AR)通道
assign M_AXI_ARID = 'b0;
assign M_AXI_ARADDR = C_M_TARGET_SLAVE_BASE_ADDR + axi_araddr;
// 读突发长度(拍数-1)
assign M_AXI_ARLEN = C_M_AXI_BURST_LEN - 1;
// 传输大小应与数据宽匹配(否则会出现窄突发)
assign M_AXI_ARSIZE = clogb2((C_M_AXI_DATA_WIDTH/8)-1);
// 一般使用 INCR 类型突发
assign M_AXI_ARBURST = 2'b01;
assign M_AXI_ARLOCK = 1'b0;
// 同 AW 通道的缓存语义设置
assign M_AXI_ARCACHE = 4'b0010;
assign M_AXI_ARPROT = 3'h0;
assign M_AXI_ARQOS = 4'h0;
assign M_AXI_ARUSER = 'b1;
assign M_AXI_ARVALID = axi_arvalid;
// 读数据(R)通道
assign M_AXI_RREADY = axi_rready;
// 示例设计的 I/O
assign TXN_DONE = compare_done;
// 突发字节数
assign burst_size_bytes = C_M_AXI_BURST_LEN * C_M_AXI_DATA_WIDTH/8;
assign init_txn_pulse = (!init_txn_ff2) && init_txn_ff;// 产生一个脉冲以启动 AXI 事务
always @(posedge M_AXI_ACLK)begin// 复位时清零if (M_AXI_ARESETN == 0 )begininit_txn_ff <= 1'b0;init_txn_ff2 <= 1'b0;endelsebegininit_txn_ff <= INIT_AXI_TXN;init_txn_ff2 <= init_txn_ff;endend//--------------------
// 写地址通道
//--------------------// 写地址通道用于为整个事务提供地址和命令信息,仅 1 拍信息。// 本例会在从设备/互连允许的情况下尽可能快地发起写地址。
// 每次地址被接受后,地址按 burst_size_bytes 递增。always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1 )beginaxi_awvalid <= 1'b0;end// 若之前未拉高,则在需要时启动下一次事务else if (~axi_awvalid && start_single_burst_write)beginaxi_awvalid <= 1'b1;end/* 一旦拉高 VALID,不可提前拉低,因此需等待从端接受 */else if (M_AXI_AWREADY && axi_awvalid)beginaxi_awvalid <= 1'b0;endelseaxi_awvalid <= axi_awvalid;end// 在 AWREADY 接受后更新下一个地址always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1)beginaxi_awaddr <= 'b0;endelse if (M_AXI_AWREADY && axi_awvalid)beginaxi_awaddr <= axi_awaddr + burst_size_bytes;endelseaxi_awaddr <= axi_awaddr;end//--------------------
// 写数据通道
//--------------------// 写数据通道会持续尝试推送写数据。// 可被接收的数据量取决于从设备和互连(例如互连中是否启用 FIFO)。// 写数据通道与写地址通道时序无显式关系,
// 它有自身的节流标志,与 AW 通道独立。// 通道间的同步需由用户逻辑保证。// 最简单但最低性能的方式是一次只发一个 AW 和一个 W 突发。// 在本例中,通过相同的地址增量与突发大小保持同步;
// 同时在用户逻辑中用计数阈值防止某一通道跑得过快。// 当前进在 WVALID 且 WREADY 同时为 1 时发生assign wnext = M_AXI_WREADY & axi_wvalid;// WVALID 逻辑,类似于上面的 axi_awvalidalways @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1 )beginaxi_wvalid <= 1'b0;end// 若之前未有效,在需要时启动else if (~axi_wvalid && start_single_burst_write)beginaxi_wvalid <= 1'b1;end/* 若 WREADY 且达到最后一拍,则拉低 WVALID。一旦拉高,必须等到突发完成(WLAST)才能拉低。 */else if (wnext && axi_wlast)axi_wvalid <= 1'b0;elseaxi_wvalid <= axi_wvalid;end// WLAST 生成:基于计数器在倒数第二拍置位
// 逻辑类似于上面的 axi_awvalidalways @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1 )beginaxi_wlast <= 1'b0;end// 当写拍计数到倒数第二拍时置位 WLAST,以与最后一拍数据对齐// else if (&(write_index[C_TRANSACTIONS_NUM-1:1])&& ~write_index[0] && wnext)else if (((write_index == C_M_AXI_BURST_LEN-2 && C_M_AXI_BURST_LEN >= 2) && wnext) || (C_M_AXI_BURST_LEN == 1 ))beginaxi_wlast <= 1'b1;end// 在最后一拍被从设备接受后,拉低 WLASTelse if (wnext)axi_wlast <= 1'b0;else if (axi_wlast && C_M_AXI_BURST_LEN == 1)axi_wlast <= 1'b0;elseaxi_wlast <= axi_wlast;end/* 突发拍计数器。使用额外最高位指示终止态以简化译码逻辑 */always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1 || start_single_burst_write == 1'b1)beginwrite_index <= 0;endelse if (wnext && (write_index != C_M_AXI_BURST_LEN-1))beginwrite_index <= write_index + 1;endelsewrite_index <= write_index;end/* 写数据生成器数据模式:每个突发从 1 开始自增(示例模式) */always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1)axi_wdata <= i_key_pulse_cnt;//else if (wnext && axi_wlast)// axi_wdata <= 'b0;else if (wnext)axi_wdata <= axi_wdata + 1;elseaxi_wdata <= axi_wdata;end//----------------------------
// 写响应(B)通道
//----------------------------// 写响应通道用于反馈写入已提交到存储。
// 当所有写数据与写地址到达并被接受后,会出现 BREADY/BVALID 握手。// 写事务的“签发”(未完成的写地址数)由 AW 触发,
// 以 BREADY/BRESP 完成闭环。// 虽然拉低 BREADY 最终会反压 AWREADY,
// 但不建议用这种方式去节流整个写通道。// BRESP[1] 用于指示互连或从设备对整个写突发的错误。
// 本例将把该错误记录到 ERROR 输出。always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1 )beginaxi_bready <= 1'b0;end// 当从端拉高 BVALID 且主端尚未拉高 BREADY 时,接受该响应else if (M_AXI_BVALID && ~axi_bready)beginaxi_bready <= 1'b1;end// 一个时钟后拉低else if (axi_bready)beginaxi_bready <= 1'b0;end// 保持elseaxi_bready <= axi_bready;end// 标记写响应错误assign write_resp_error = axi_bready & M_AXI_BVALID & M_AXI_BRESP[1];//----------------------------
// 读地址通道
//----------------------------// 读地址通道与写地址通道功能类似:提供突发的限定信息。// 本例读地址按与写地址相同的方式递增。always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1 )beginaxi_arvalid <= 1'b0;end// 若之前未拉高,则在需要时启动下一次事务else if (~axi_arvalid && start_single_burst_read)beginaxi_arvalid <= 1'b1;endelse if (M_AXI_ARREADY && axi_arvalid)beginaxi_arvalid <= 1'b0;endelseaxi_arvalid <= axi_arvalid;end// 在 ARREADY 接受后更新下一个读地址always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1)beginaxi_araddr <= 'b0;endelse if (M_AXI_ARREADY && axi_arvalid)beginaxi_araddr <= axi_araddr + burst_size_bytes;endelseaxi_araddr <= axi_araddr;end//--------------------------------
// 读数据(及响应)通道
//--------------------------------// 通道前进在 RVALID 与 RREADY 同时为 1 时发生assign rnext = M_AXI_RVALID && axi_rready;// 读突发拍计数器。使用额外最高位指示终止态以简化译码always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1 || start_single_burst_read)beginread_index <= 0;endelse if (rnext && (read_index != C_M_AXI_BURST_LEN-1))beginread_index <= read_index + 1;endelseread_index <= read_index;end/*读数据通道返回读请求的结果。在本例中,数据校验器始终可以接收更多数据,因此无需节流 RREADY。*/always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1 )beginaxi_rready <= 1'b0;end// 当从端拉高 RVALID 时,用 axi_rready 接受 rdata/rrespelse if (M_AXI_RVALID)beginif (M_AXI_RLAST && axi_rready)beginaxi_rready <= 1'b0;endelsebeginaxi_rready <= 1'b1;endend// 保持上一值end// 对读回数据进行校验always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1)beginread_mismatch <= 1'b0;end// 仅在 RVALID 有效时进行比较else if (rnext && (M_AXI_RDATA != expected_rdata))beginread_mismatch <= 1'b1;endelseread_mismatch <= 1'b0;end// 标记读响应错误assign read_resp_error = axi_rready & M_AXI_RVALID & M_AXI_RRESP[1];//----------------------------------------
// 示例设计:读校验数据生成器
//-----------------------------------------// 生成期望的读数据,用于与实际读回数据比较always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1)// || M_AXI_RLAST)expected_rdata <= i_key_pulse_cnt;else if (M_AXI_RVALID && axi_rready)expected_rdata <= expected_rdata + 1;elseexpected_rdata <= expected_rdata;end//----------------------------------
// 示例设计:错误寄存器
//----------------------------------// 记录并保持任意数据不匹配或读/写接口错误always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1)beginerror_reg <= 3'b0;endelse if (read_mismatch || write_resp_error || read_resp_error)beginerror_reg <= {read_mismatch,write_resp_error,read_resp_error};endelseerror_reg <= error_reg;end//--------------------------------
// 示例设计:通道节流
//--------------------------------// 为了最大吞吐量,本示例尽量让各通道独立且尽快地运行。// 但在某些情况下,用户需要对数据流进行节流:
// - 要求先写后读(读在写完全完成后再开始)
// - 当未读完 + 已签发事务数超过阈值时,暂停地址写
// - 当未读完 + 正在进行的数据突发超过阈值时,暂停写// AXI4 规范 13.13.1:若主设备需要读写顺序性,
// 必须在发起下一事务前,确保已收到上一个事务的响应。// write_burst_counter 记录已发起写突发的个数,// 与需要发起的总突发数进行对比always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1 )beginwrite_burst_counter <= 'b0;endelse if (M_AXI_AWREADY && axi_awvalid)beginif (write_burst_counter[C_NO_BURSTS_REQ] == 1'b0)beginwrite_burst_counter <= write_burst_counter + 1'b1;//write_burst_counter[C_NO_BURSTS_REQ] <= 1'b1;endendelsewrite_burst_counter <= write_burst_counter;end// read_burst_counter 记录已发起读突发的个数,// 与需要发起的总突发数进行对比always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1)beginread_burst_counter <= 'b0;endelse if (M_AXI_ARREADY && axi_arvalid)beginif (read_burst_counter[C_NO_BURSTS_REQ] == 1'b0)beginread_burst_counter <= read_burst_counter + 1'b1;//read_burst_counter[C_NO_BURSTS_REQ] <= 1'b1;endendelseread_burst_counter <= read_burst_counter;end// 主控制状态机always @ ( posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 1'b0 )begin// 复位条件下的默认值mst_exec_state <= IDLE;start_single_burst_write <= 1'b0;start_single_burst_read <= 1'b0;compare_done <= 1'b0;ERROR <= 1'b0;endelsebegin// 状态转换case (mst_exec_state)IDLE:// 等待 INIT_AXI_TXN 的上升沿触发if ( init_txn_pulse == 1'b1)beginmst_exec_state <= INIT_WRITE;ERROR <= 1'b0;compare_done <= 1'b0;endelsebeginmst_exec_state <= IDLE;endINIT_WRITE:// 发出 start_single_burst_write 脉冲以启动写事务。// 当 writes_done 拉高后,转入 INIT_READ。if (writes_done)beginmst_exec_state <= INIT_READ;endelsebeginmst_exec_state <= INIT_WRITE;if (~axi_awvalid && ~start_single_burst_write && ~burst_write_active)beginstart_single_burst_write <= 1'b1;endelsebeginstart_single_burst_write <= 1'b0; // 脉冲信号endendINIT_READ:// 发出 start_single_burst_read 脉冲以启动读事务。// 当 reads_done 拉高后,转入 INIT_COMPARE。if (reads_done)beginmst_exec_state <= INIT_COMPARE;endelsebeginmst_exec_state <= INIT_READ;if (~axi_arvalid && ~burst_read_active && ~start_single_burst_read)beginstart_single_burst_read <= 1'b1;endelsebeginstart_single_burst_read <= 1'b0; // 脉冲信号endendINIT_COMPARE:// 比较已写数据与读回数据。// 若没有错误标志,则 compare_done 拉高表示成功。//if (~error_reg)beginERROR <= error_reg;mst_exec_state <= IDLE;compare_done <= 1'b1;enddefault :beginmst_exec_state <= IDLE;endendcaseendend // MASTER_EXECUTION_PROC// burst_write_active 在启动一次写突发后拉高,// 直到该突发被从端接受(收到 BVALID 且主端 BREADY)always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1)burst_write_active <= 1'b0;// 启动写突发时置位else if (start_single_burst_write)burst_write_active <= 1'b1;else if (M_AXI_BVALID && axi_bready)burst_write_active <= 0;end// 检测最后一次写完成// 用最终的写响应与计数配合,确认写已提交always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1)writes_done <= 1'b0;// writes_done 应与一次有效的 bready 响应关联//else if (M_AXI_BVALID && axi_bready && (write_burst_counter == {(C_NO_BURSTS_REQ-1){1}}) && axi_wlast)else if (M_AXI_BVALID && (write_burst_counter[C_NO_BURSTS_REQ]) && axi_bready)writes_done <= 1'b1;elsewrites_done <= writes_done;end// burst_read_active 在启动一次读突发后拉高,// 直到该突发被主端接受(收到 RLAST 且主端 RREADY)always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1)burst_read_active <= 1'b0;// 启动读突发时置位else if (start_single_burst_read)burst_read_active <= 1'b1;else if (M_AXI_RVALID && axi_rready && M_AXI_RLAST)burst_read_active <= 0;end// 检测最后一次读完成// 用最终的读响应与计数配合,确认读已提交always @(posedge M_AXI_ACLK)beginif (M_AXI_ARESETN == 0 || init_txn_pulse == 1'b1)reads_done <= 1'b0;// reads_done 应与一次有效的 rready 响应关联//else if (M_AXI_BVALID && axi_bready && (write_burst_counter == {(C_NO_BURSTS_REQ-1){1}}) && axi_wlast)else if (M_AXI_RVALID && axi_rready && (read_index == C_M_AXI_BURST_LEN-1) && (read_burst_counter[C_NO_BURSTS_REQ]))reads_done <= 1'b1;elsereads_done <= reads_done;end// 在此添加用户逻辑// 用户逻辑结束endmodulekey_debounce.v
// ============================================================================
// Module name : key_debounce
// Author : ming
// Description : 按键消抖模块
// - 按键持续按下超过设定时间后,输出一个时钟周期脉冲
// - 累计按键按下次数
// Parameters : P_CLK_FREQ_MHZ - 输入时钟频率 (MHz)
// P_DEBOUNCE_MS - 消抖时间 (ms)
// L_CNT_WIDTH - 计数器位宽
// ============================================================================module key_debounce
#(parameter P_CLK_FREQ_MHZ = 50, // 时钟频率 MHzparameter P_DEBOUNCE_MS = 20, // 消抖时间 msparameter L_CNT_WIDTH = 32 // 计数器位宽
)
(input wire i_clk, // 系统时钟input wire i_rst_n, // 全局复位,低有效input wire i_key, // 按键输入(低有效)output reg o_key_pulse, // 消抖脉冲output reg [31:0] o_key_pulse_cnt // 按键次数
);// 根据时钟频率和消抖时间计算最大计数值localparam L_MAX_CNT = P_CLK_FREQ_MHZ * 1000 * P_DEBOUNCE_MS;reg [L_CNT_WIDTH-1:0] r_cnt;// 计数器:按键按下计时always@(posedge i_clk or negedge i_rst_n)if(!i_rst_n)r_cnt <= {(L_CNT_WIDTH+1){1'b0}};else if(i_key == 1)r_cnt <= {(L_CNT_WIDTH+1){1'b0}};else if(i_key == 0 && r_cnt < L_MAX_CNT-1)r_cnt <= r_cnt + 1'b1;elser_cnt <= r_cnt;// 输出脉冲:稳定按下超过设定时间,输出 1 个时钟周期脉冲always@(posedge i_clk or negedge i_rst_n)if(!i_rst_n) begin o_key_pulse <= 1'b0;o_key_pulse_cnt <= 32'd0;end else if(r_cnt == L_MAX_CNT-2) begin o_key_pulse <= 1'b1;o_key_pulse_cnt <= o_key_pulse_cnt + 1;end elseo_key_pulse <= 1'b0;endmodulesystem.xdc
#开发板约束文件#时序约束
create_clock -period 20.000 -name PL_GCLK [get_ports PL_GCLK]#IO引脚约束
#----------------------系统时钟---------------------------
set_property -dict {PACKAGE_PIN U18 IOSTANDARD LVCMOS33} [get_ports PL_GCLK]#----------------------系统复位---------------------------
set_property -dict {PACKAGE_PIN N16 IOSTANDARD LVCMOS33} [get_ports PL_RESET]#----------------------PL_KEY---------------------------
set_property -dict {PACKAGE_PIN L14 IOSTANDARD LVCMOS33} [get_ports KEY0]
set_property -dict {PACKAGE_PIN K16 IOSTANDARD LVCMOS33} [get_ports KEY1]#----------------------PL_LED---------------------------
#底板
set_property -dict {PACKAGE_PIN H15 IOSTANDARD LVCMOS33} [get_ports LED0]
set_property -dict {PACKAGE_PIN L15 IOSTANDARD LVCMOS33} [get_ports LED1]#----------------------PL_UART(RS232)/RS485---------------------------
set_property -dict {PACKAGE_PIN K14 IOSTANDARD LVCMOS33} [get_ports PL_UART_RXD]
set_property -dict {PACKAGE_PIN M15 IOSTANDARD LVCMOS33} [get_ports PL_UART_TXD]PS 裸机测试
#include "xil_io.h"
#include "xil_mmu.h"
#include "xil_printf.h"#include "xparameters.h"
#include "xscugic.h"
#include <stdio.h>
//共享内存基地址
#define SHARE_MEM_BASE 0x10000000U
//S_AXI_GP0 接口写入的集地址
#define BASE_ADDR 0x10000000U
#define MAX_INDEX 1023// ======= PL中断号 =======
#define PL_IRQ_ID61 61
#define GIC_DEVICE_ID XPAR_PS7_SCUGIC_0_DEVICE_ID
// GIC 控制器实例
XScuGic intc;
// =============================
// PL 中断服务函数
// 对应 PL 触发的 IRQ 信号 (IRQ_F2P)
// =============================
static void PL_IRQHandler(void *ctx) {uintptr_t irq_src = (uintptr_t)ctx;static int irq_cnt=0;irq_cnt++;xil_printf("PL%d triggered %d!\r\n",irq_src,irq_cnt);//起始地址int regInx_start=0;u32 read_val_start = Xil_In32(BASE_ADDR + 4 * regInx_start);xil_printf("[r %d] = 0x%08X / %u\r\n", regInx_start, read_val_start, read_val_start);//终止地址int regInx_end=1023;u32 read_val_end = Xil_In32(BASE_ADDR + 4 * regInx_end);xil_printf("dif [r %d] = 0x%08X / %u\r\n", regInx_end, read_val_end-read_val_start, read_val_end-read_val_start);}// =============================
// 中断控制器初始化函数
// 配置 GIC,用于使能 PL 触发的中断
// =============================
static int IRQ_Init(void)
{int status;XScuGic_Config *cfg = XScuGic_LookupConfig(GIC_DEVICE_ID);if (!cfg) return XST_FAILURE;// 1) 初始化 GIC(只此一次)status = XScuGic_CfgInitialize(&intc, cfg, cfg->CpuBaseAddress);if (status != XST_SUCCESS) return status;// 2) 顶层异常框架(只此一次)Xil_ExceptionInit();Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,(Xil_ExceptionHandler)XScuGic_InterruptHandler,&intc);// 3) 触发方式 & 优先级(可选但推荐;数值越小优先级越高)// PL 直连 IRQ_F2P 通常上升沿(0x3),示例优先级 0x80(高于 UART)XScuGic_SetPriorityTriggerType(&intc, PL_IRQ_ID61, 0x80, 0x3);// 4) 连接中断源status = XScuGic_Connect(&intc, PL_IRQ_ID61,(Xil_ExceptionHandler)PL_IRQHandler, (void*)0);if (status != XST_SUCCESS) return status;// 5) 使能XScuGic_Enable(&intc, PL_IRQ_ID61);// 6) 全局开中断(只此一次)Xil_ExceptionEnable();return XST_SUCCESS;
}int main() {xil_printf("S_AXI_HP0 test.\n");//直接把 Cortex-A9 的数据缓存(D-Cache)全局关闭。// Xil_DCacheDisable();//把指定的地址段(通常 1MB 对齐)标记为 “非缓存、可共享” 内存Xil_SetTlbAttributes(SHARE_MEM_BASE, NORM_NONCACHE | SHAREABLE);IRQ_Init();char cmd;int index;u32 value;while (1) {xil_printf("> ");if (scanf(" %c", &cmd) != 1)continue;switch (cmd){case 'r':if (scanf("%d", &index) == 1){if (index < 0 || index > MAX_INDEX){xil_printf("Error: index out of range [0 ~ %d]\r\n", MAX_INDEX);while (getchar() != '\n');continue;}u32 read_val = Xil_In32(BASE_ADDR + 4 * index);xil_printf("[r %d] = 0x%08X / %u\r\n", index, read_val, read_val);}else{xil_printf("Invalid input. Use: r <index>\r\n");while (getchar() != '\n');}break;case 'w':if (scanf("%d %u", &index, &value) == 2){if (index < 0 || index > MAX_INDEX){xil_printf("Error: index out of range [0 ~ %d]\r\n", MAX_INDEX);while (getchar() != '\n');continue;}Xil_Out32(BASE_ADDR + 4 * index, value);xil_printf("[w %d] = 0x%08X / %u\r\n", index, value, value);}else{xil_printf("Invalid input. Use: w <index> <value>\r\n");while (getchar() != '\n');}break;case 'l':{break;}default:xil_printf("Unknown command '%c'. Use 'r' or 'w'.\r\n", cmd);while (getchar() != '\n');break;}}return 0;
}测试结果