EtherCAT转CANopen网关实现与伺服系统连通的配置实例探究
在工业自动化领域中,不同生产商的设备通常会采用不同的通信协议。ETHERCAT作为一项具有高性能的工业以太网协议,因其具备高速及高精度同步的特性,在运动控制领域获得了广泛应用。的ETHERCAT总线伺服系统可作为该领域的典型代表,在机器人、自动化生产线等应用场景中能够实现精准的运动控制与快速响应。而CANOPEN作为一种基于CAN总线的应用层协议,在工业自动化中也获得了众多设备的支持,例如传感器、执行器、小型控制器等。此协议凭借其良好的开放性、可靠性和实时性,特别适合用于分布式控制系统内设备之间的通信。
本文所涉及的是一款自主研发的通讯网关,此网关可实现ETHERCAT网络与CANOPEN网络的连接,达成两个协议之间的互联互通。当作为ETHERCAT从站时,它能够接入ETHERCAT总线;作为CANOPEN主站时,可与CANOPEN总线相连。该通讯网关的出现有效解决了数据通讯问题,为生产管理系统的数据通讯提供了有力保障。可以预期,在未来,这款EtherCAT转canopen网关将在更多生产领域发挥重要作用。下面给出其配置方法,以供参考。
-
开展EtherCAT转canopen网关ETHERCAT从站的配置工作:
1.把网关的xml文件拷贝至主站的指定目录;
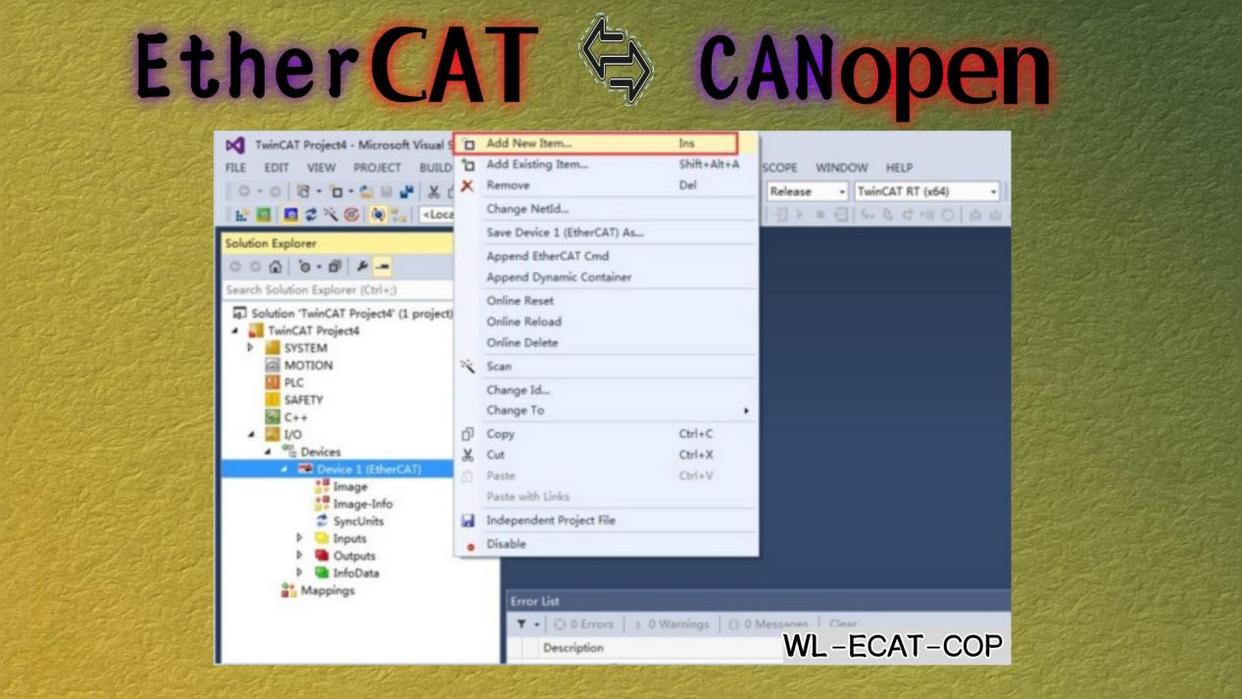
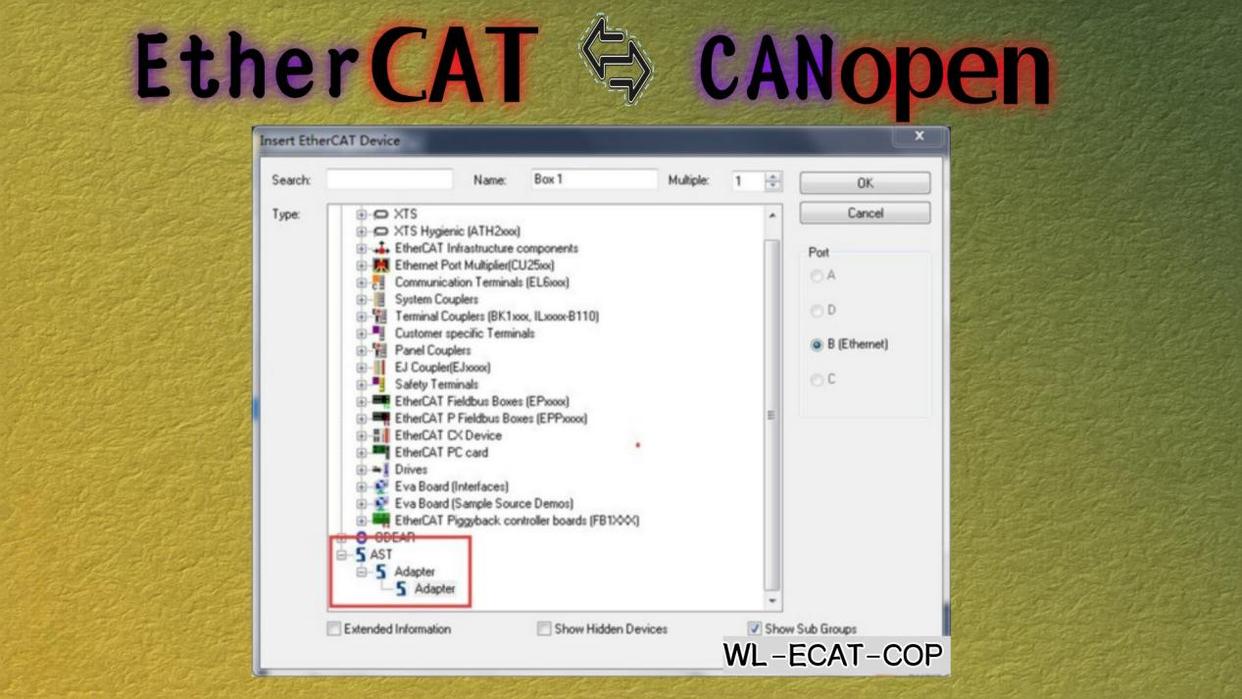
2.在主站里添加新的从站,选中网关设备进行相关配置,具体操作可参考下图。
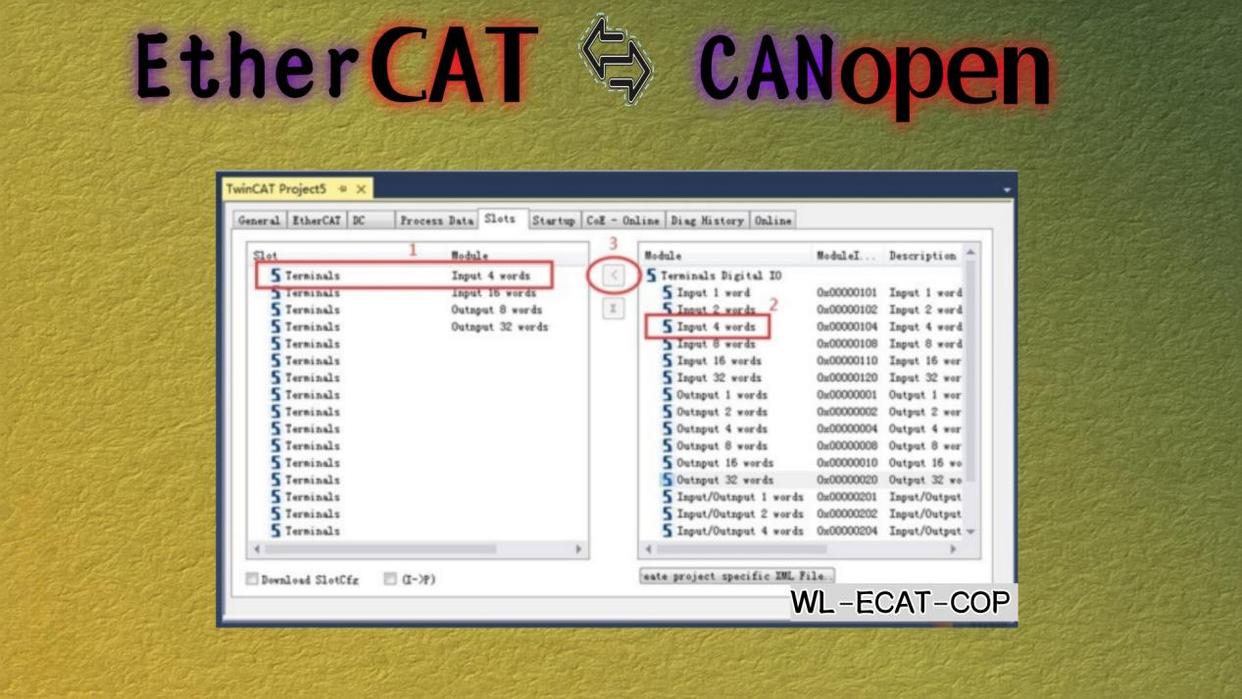
在本研究中,所设计的用户界面允许用户进行输入输出数据的配置。具体而言,用户可在Slot列表中添加多达十条配置信息。右侧的Module列表提供了可选的配置选项,每项均可被用户添加至相应的Slot中。用户遵循图示的步骤1、2、3,即可实现Module到Slot的配置过程。
-
配置EtherCAT转canopen网关CANOPEN 主站
-
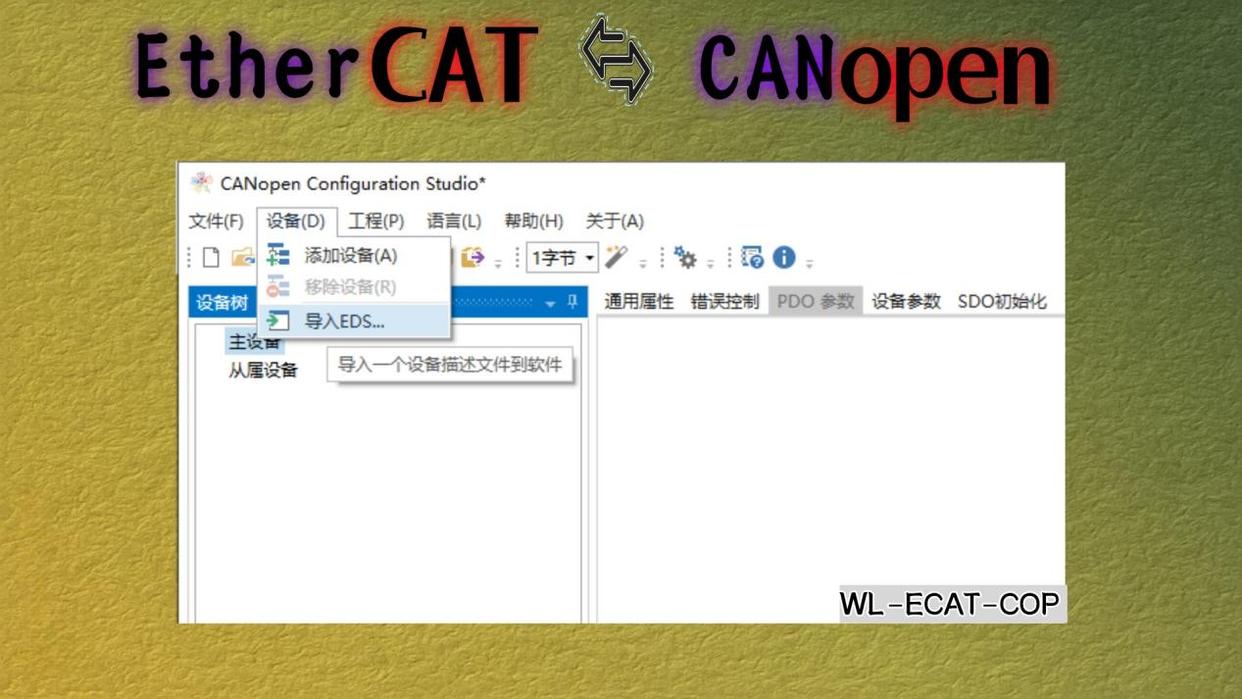
导入EDS 文件
请启动GW_Canopen_Builder_V10.9.exe程序,并点击“工具”菜单中的“导入EDS”选项。
-
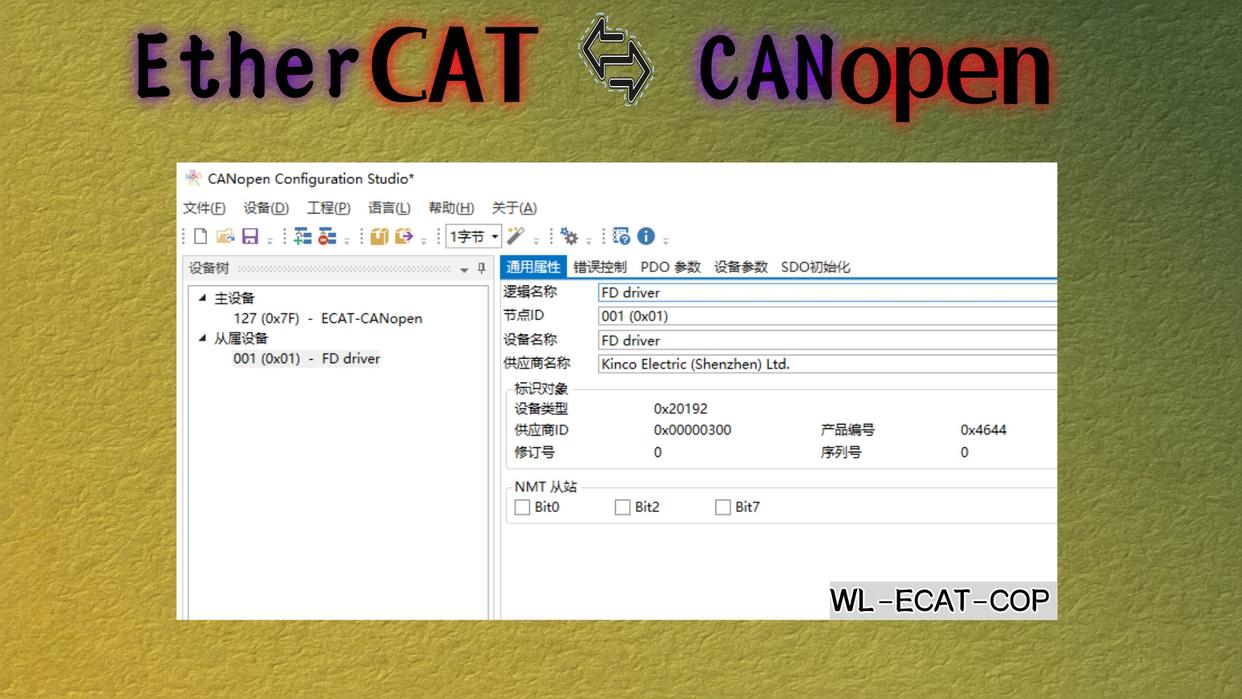
增设EtherCAT转canopen网关CANOPEN站点
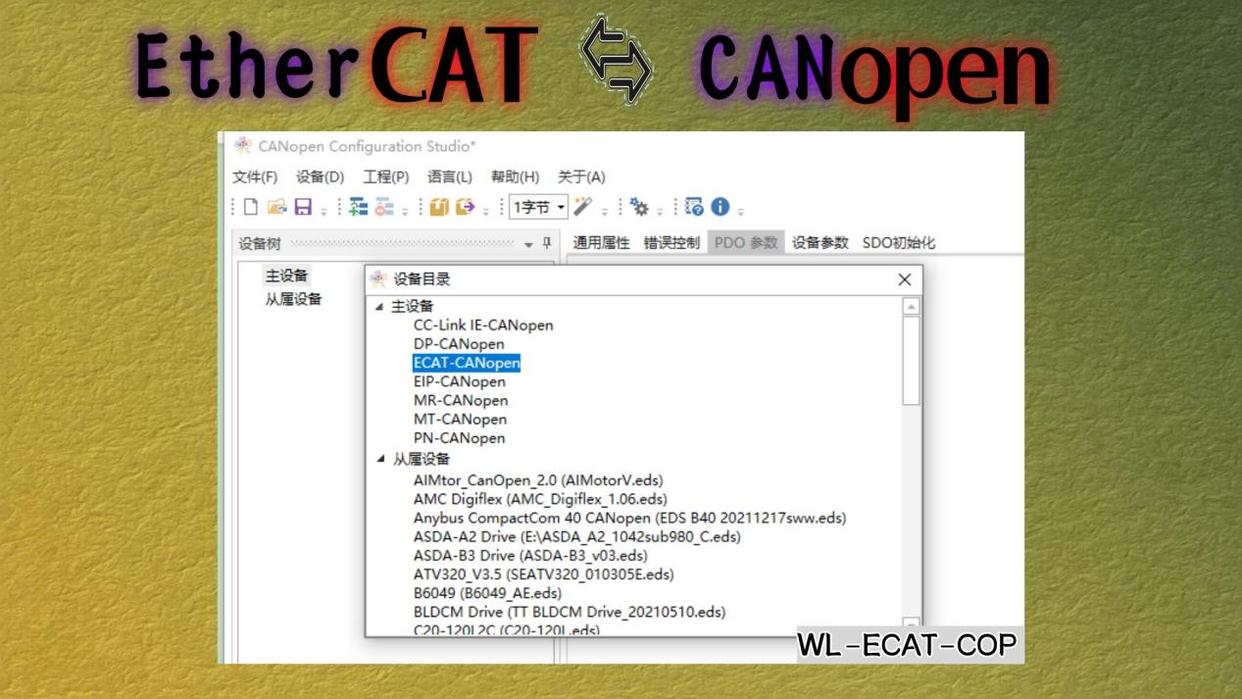
新增了CANOPEN从站,该从站位于右侧区域。
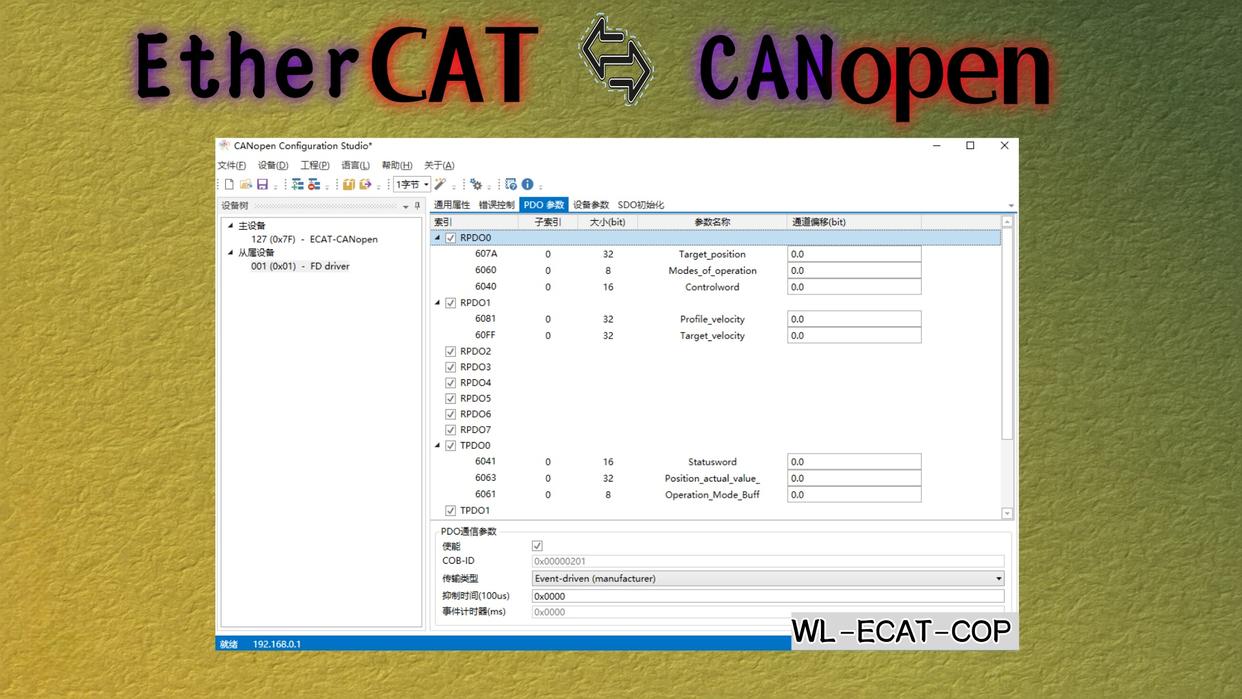
在进行过程数据对象(PDO)配置过程中,必须依据具体应用需求,精心挑选适宜的参数进行映射。以“控制字6040”与“运行模式6060”的添加为例,应精确地选择并配置参数6040或6060。
下载配置
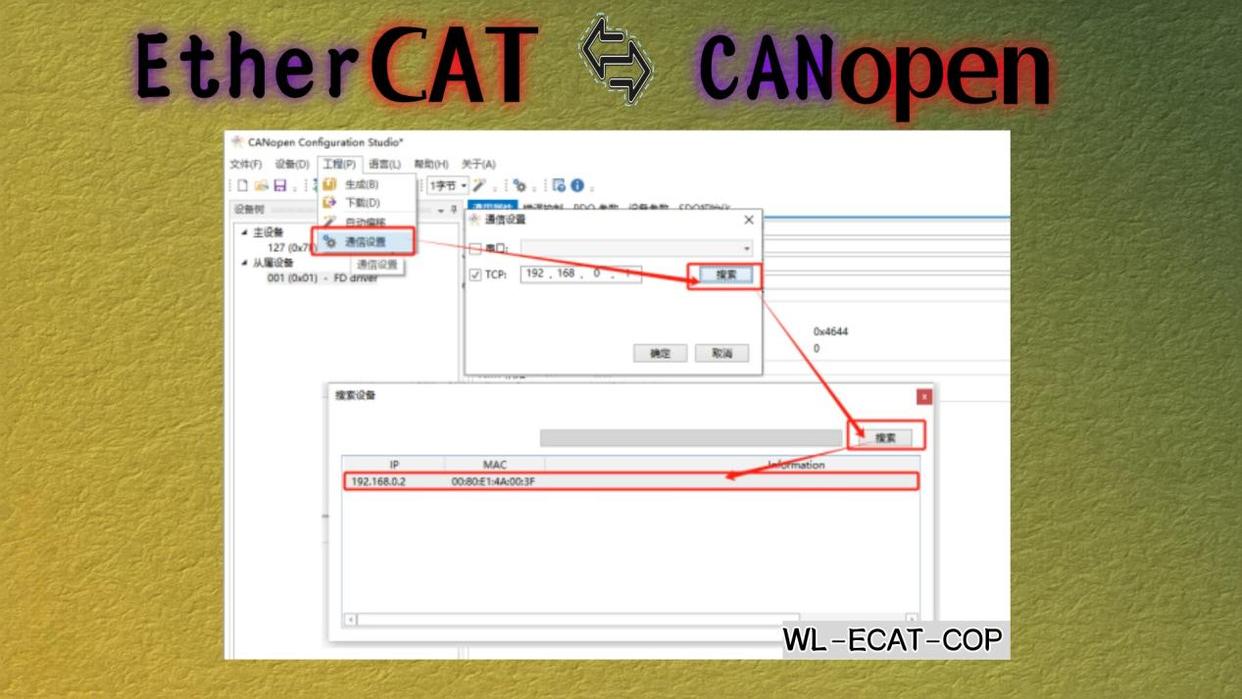
应将计算机网络配置调整为IP地址192.168.1.10。操作步骤如下:依序点击“设置”菜单里的“网络与互联网”,接着选择“以太网”,在弹出界面中对计算机IP地址予以配置。之后,开启PDO通讯协议。
ETHERCAT总线伺服的运行状态数据能够通过网关传输至CANOPEN设备,为后者提供决策支持;同时,CANOPEN设备采集的数据亦能反馈至伺服系统,从而实现更为精确的控制。这种数据共享机制对于优化生产流程、提升产品质量具有积极作用,并为企业的生产管理提供了更为全面的信息支持。EtherCAT转canopen网关