Ubuntu24.04安装ROS2问题
1,根据官方指导安装,安装到步骤:
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
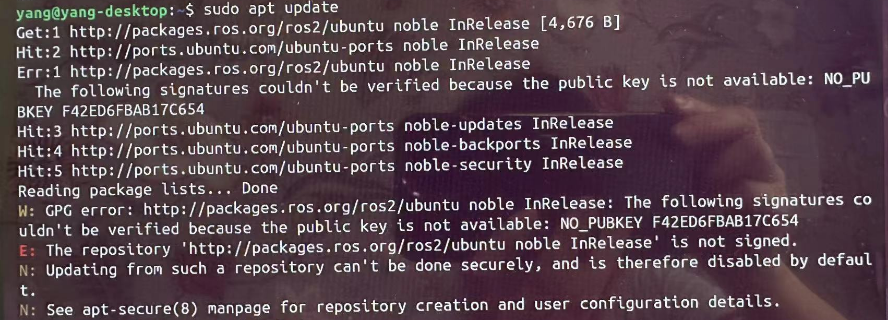
时遇到问题。导致sudo apt update一直报错:
找了几天的资料,发现是ros.key下载没成功,手动下载到Download文件夹后:

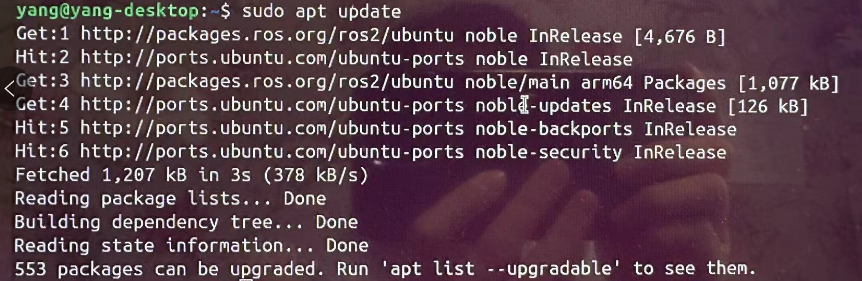
完美解决。
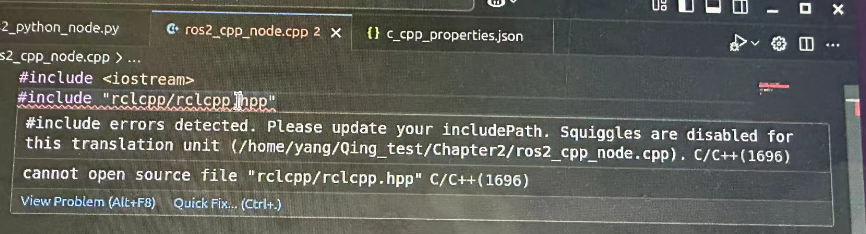
二,又遇到问题,在写c++程序,引入头文件:#inlcude "rclcpp/rclcpp.hpp" 时报错:
按下ctrl+shift+p,选择vscode的编辑配置选项,写入rclcpp的路径:
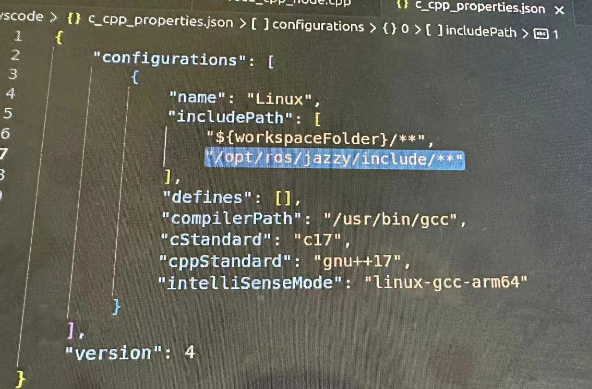
问题解决