人工智能数学基础实验(二):奇异值分解(SVD)-图像处理
一、实验目的
- 掌握奇异值分解(SVD)的原理与方法:理解 SVD 如何将矩阵分解为左奇异矩阵、奇异值矩阵和右奇异矩阵,及其数学意义。
- 理解 SVD 在图像处理中的应用:重点掌握 SVD 在图像压缩和特征提取中的实际应用,通过调整保留的奇异值数量观察图像质量变化。
- Python 算法实现能力:学会使用 NumPy 等库实现 SVD 图像处理算法,提升数据处理和可视化能力。
二、实验要求
(一)图像预处理
- 读取彩色图像并转换为 RGB 矩阵(三维数组)。
- 分离图像的 R、G、B 三个颜色通道,分别进行处理。
(二)SVD 分解与重建
- 对每个颜色通道的矩阵进行 SVD 分解,得到左奇异矩阵 U、奇异值向量 S 和右奇异矩阵 。
- 保留前 k 个最大的奇异值,截断其余奇异值及对应矩阵分量。
- 使用截断后的矩阵重建各颜色通道,并合并为完整图像。
(三)结果分析
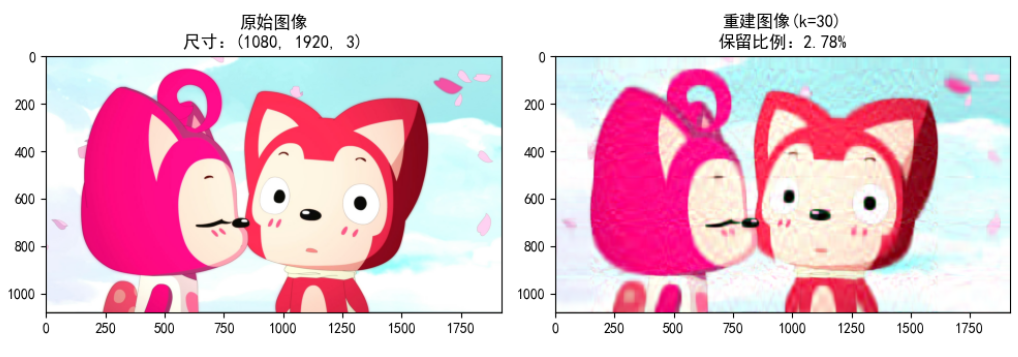
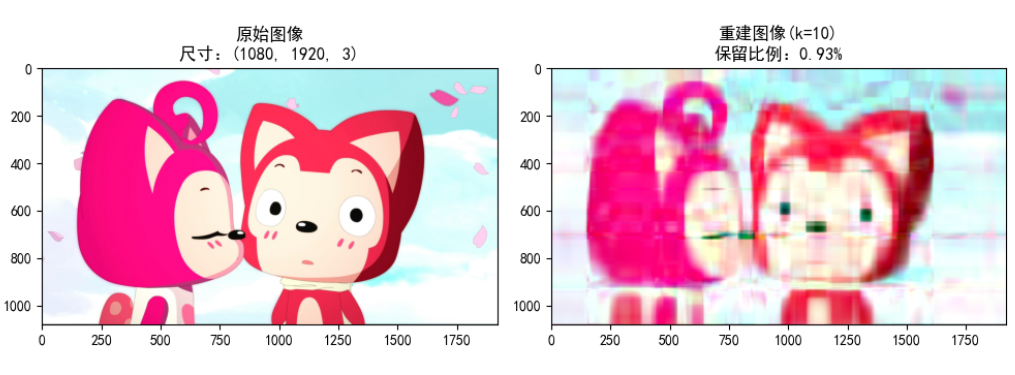
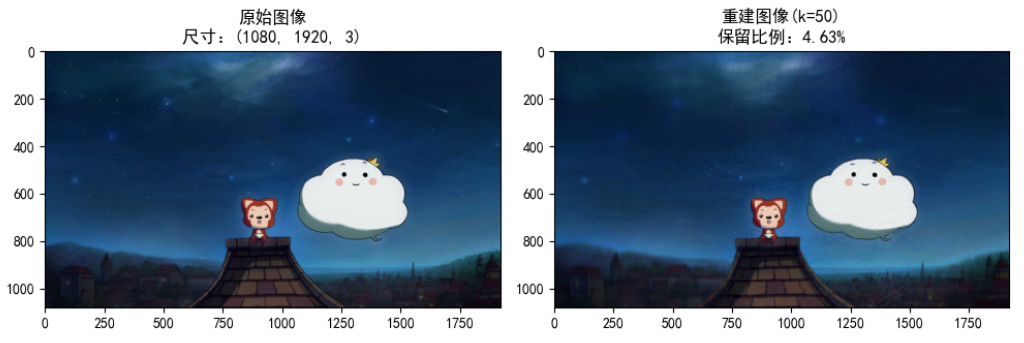
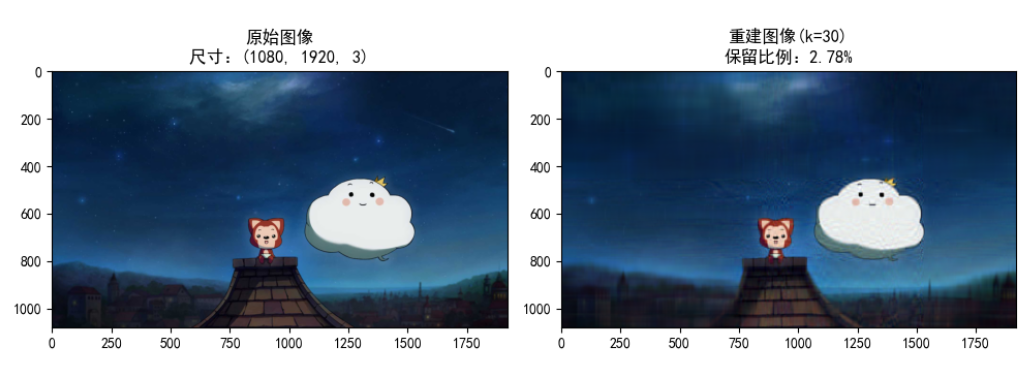
- 对比原始图像与重建图像,分析保留奇异值数量 k 对图像质量的影响。
- 输出分解矩阵的形状和部分数据(如 R 通道前 5×5 矩阵),验证算法正确性。
三、实验原理
(一)奇异值分解(SVD)基础
(二)图像压缩原理
- 奇异值的大小对应图像特征的重要性:保留前 k 个最大奇异值可近似保留图像的主要信息,舍去较小奇异值实现压缩。
- 压缩比公式:保留比例 = k/原始奇异值数量,数值越小压缩率越高,但图像细节损失越多。
四、实验步骤
(一)环境与库准备
import numpy as np
from PIL import Image
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei'] # 支持中文显示 (二)核心代码流程
- 读取图像并转换为矩阵
original_image = Image.open("灰度图片3.jpg").convert('RGB')
img_array = np.array(original_image) # 形状为 (高度, 宽度, 3) - 分离 RGB 通道
channels = []
for i in range(3): channel = img_array[:, :, i].astype(np.float64) # 转为浮点型方便计算 channels.append(channel) - 对每个通道进行 SVD 分解与重建
reconstructed_channels = []
for channel in channels: U, S, Vt = np.linalg.svd(channel, full_matrices=False) # 分解 k = 10 # 保留前k个奇异值 S_k = np.diag(S[:k]) U_k = U[:, :k] Vt_k = Vt[:k, :] reconstructed = U_k @ S_k @ Vt_k # 矩阵相乘重建 reconstructed = np.clip(reconstructed, 0, 255) # 像素值限制在[0, 255] reconstructed_channels.append(reconstructed.astype(np.uint8)) - 合并通道并可视化对比
merged = np.stack(reconstructed_channels, axis=2)
reconstructed_image = Image.fromarray(merged) plt.figure(figsize=(10, 5))
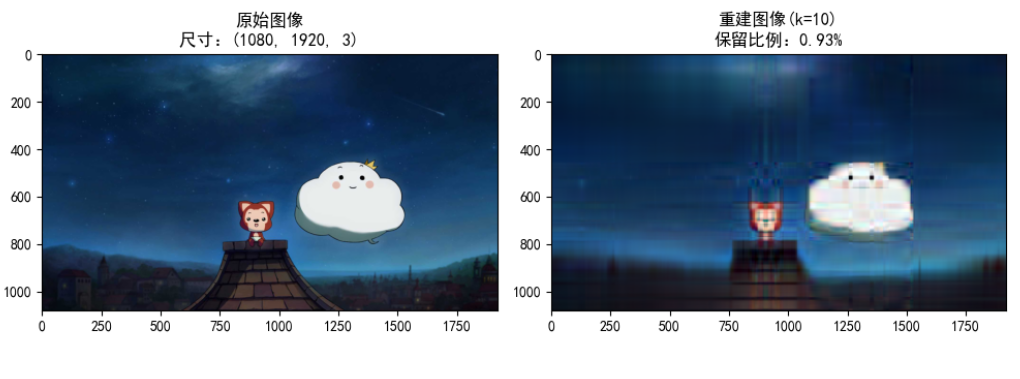
plt.subplot(1, 2, 1), plt.imshow(original_image), plt.title("原始图像")
plt.subplot(1, 2, 2), plt.imshow(reconstructed_image), plt.title(f"重建图像(k={k})")
plt.show() (三)参数与数据输出
- 打印矩阵形状(如原始图像尺寸、分解矩阵维度)。
- 输出 R 通道前 5×5 的 U、S、\(V^T\) 矩阵数据,验证分解结果。
完整源代码:
import numpy as np
from PIL import Image
import matplotlib.pyplot as pltplt.rcParams['font.sans-serif'] = ['SimHei']def svd_image_processing(image_path, k):"""使用奇异值分解(SVD)进行图像处理参数:image_path: 输入图片路径k: 保留的奇异值数量(k越大保留信息越多)"""# 读取图像并转换为RGB矩阵original_image = Image.open(image_path).convert('RGB')# 三维数组(高度,宽度,通道)img_array = np.array(original_image)print("读取图像的RGB矩阵:")print(img_array)# 分离RGB三个通道channels = []for i in range(3):# 转换为浮点数便于计算channel = img_array[:, :, i].astype(np.float64)channels.append(channel)# 对每个通道进行SVD分解和重建reconstructed_channels = []U_list, S_list, Vt_list = [], [], []for channel in channels:# 执行奇异值分解U, S, Vt = np.linalg.svd(channel, full_matrices=False)# 存储分解结果U_list.append(U)S_list.append(S)Vt_list.append(Vt)# 保留前k个奇异值# 转换为对角矩阵S_k = np.diag(S[:k])# 取前k列U_k = U[:, :k]# 取前k行Vt_k = Vt[:k, :]# 重建当前通道reconstructed = U_k @ S_k @ Vt_k# 确保像素值在合理范围reconstructed = np.clip(reconstructed, 0, 255)reconstructed_channels.append(reconstructed)# 合并通道并转换为图像merged = np.stack(reconstructed_channels, axis=2).astype(np.uint8)reconstructed_image = Image.fromarray(merged)# 打印矩阵信息print("=== 分解矩阵信息 ===")print(f"原始图像形状:{img_array.shape}")print(f"左奇异矩阵U形状(R通道):{U_list[0].shape}")print(f"奇异值矩阵S长度(R通道):{len(S_list[0])}")print(f"右奇异矩阵Vt形状(R通道):{Vt_list[0].shape}")# 显示部分矩阵数据(R通道)print("\n=== 矩阵示例(R通道前5x5) ===")print("左奇异矩阵U前5行5列:\n", U_list[0][:5, :5].round(2))print("\n奇异值前5个:\n", S_list[0][:5].round(2))print("\n右奇异矩阵Vt前5行5列:\n", Vt_list[0][:5, :5].round(2))# 显示对比图像plt.figure(figsize=(10, 10))plt.subplot(1, 2, 1)plt.imshow(original_image)plt.title(f'原始图像\n尺寸:{img_array.shape}')plt.subplot(1, 2, 2)plt.imshow(reconstructed_image)plt.title(f'重建图像(k={k})\n保留比例:{k / len(S_list[0]):.2%}')plt.tight_layout()plt.show()return reconstructed_image# 使用示例
if __name__ == "__main__":# 图片路径input_image = "灰度图片3.jpg"# 保留的奇异值数量(可自行调整)k_value = 10# 执行处理并显示结果result = svd_image_processing(input_image, k_value)import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import numpy as npdef convert_with_matplotlib(input_path, output_path):img = mpimg.imread(input_path)grayscale = np.dot(img[..., :3], [0.299, 0.587, 0.114])plt.imsave(output_path, grayscale, cmap='gray')
convert_with_matplotlib("演示图片5.jpg","灰度图片3.jpg")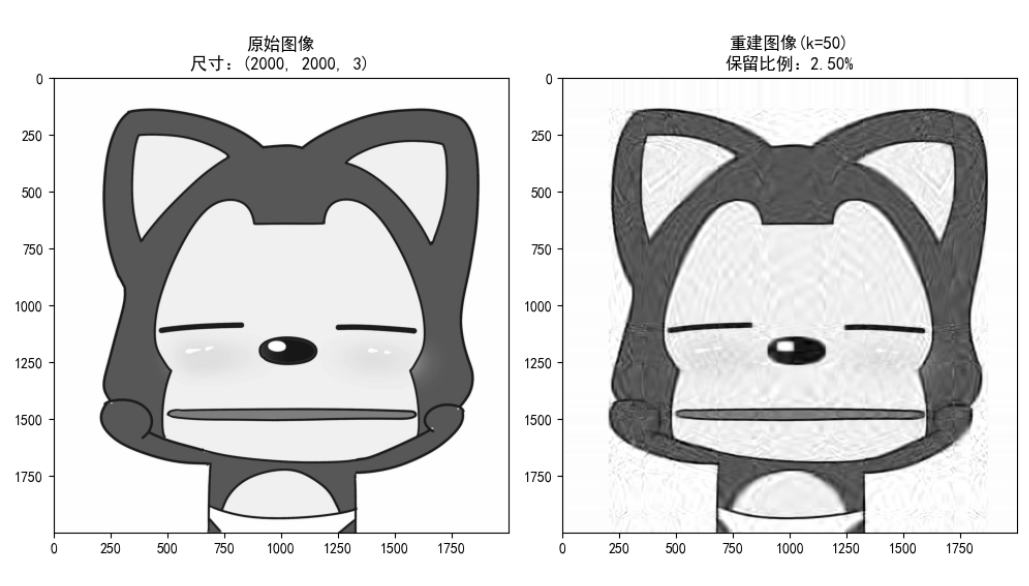

五、实验结果
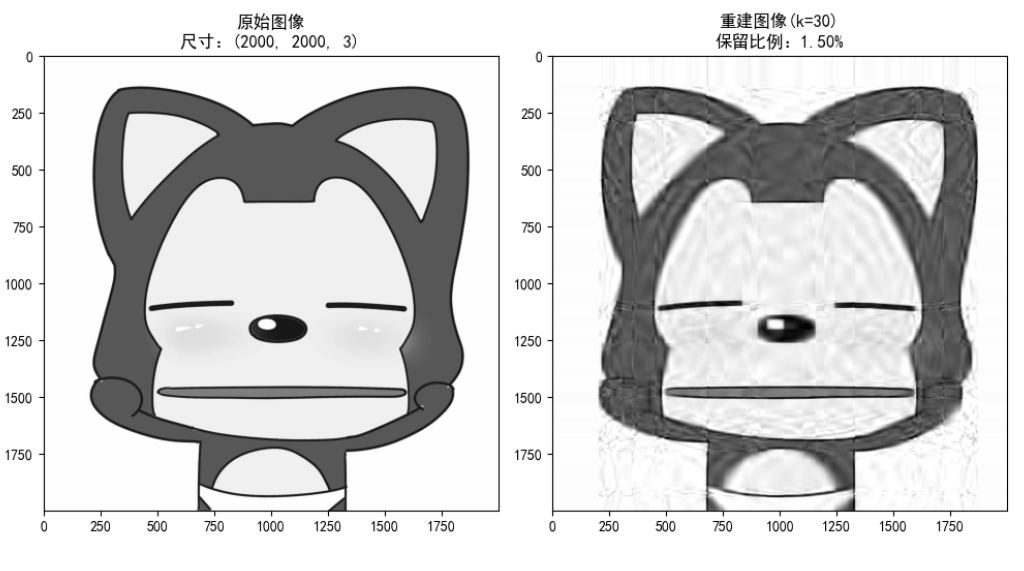
(一)图像对比分析
| 保留奇异值 k | 保留比例 | 重建图像效果 |
|---|---|---|
| (k=50) | 2.50% | 接近原始图像,细节清晰 |
| (k=30) | 1.50% | 轻微模糊,主要轮廓保留 |
| (k=10) | 0.50% | 明显模糊,细节丢失 |
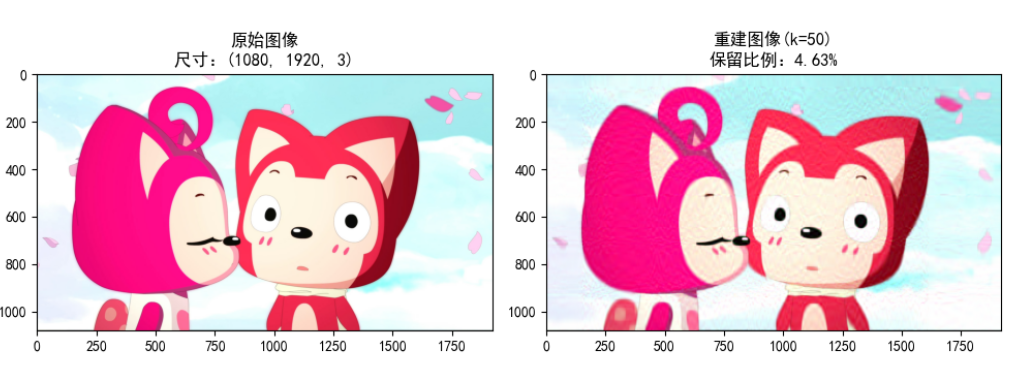
结论:
- k 越大,重建图像越接近原始图像,验证了 “奇异值越大代表信息越重要” 的原理。
- 通过调整 k 可在图像质量与压缩率之间权衡,适用于不同存储和传输场景。
(二)矩阵分解结果示例(R 通道)
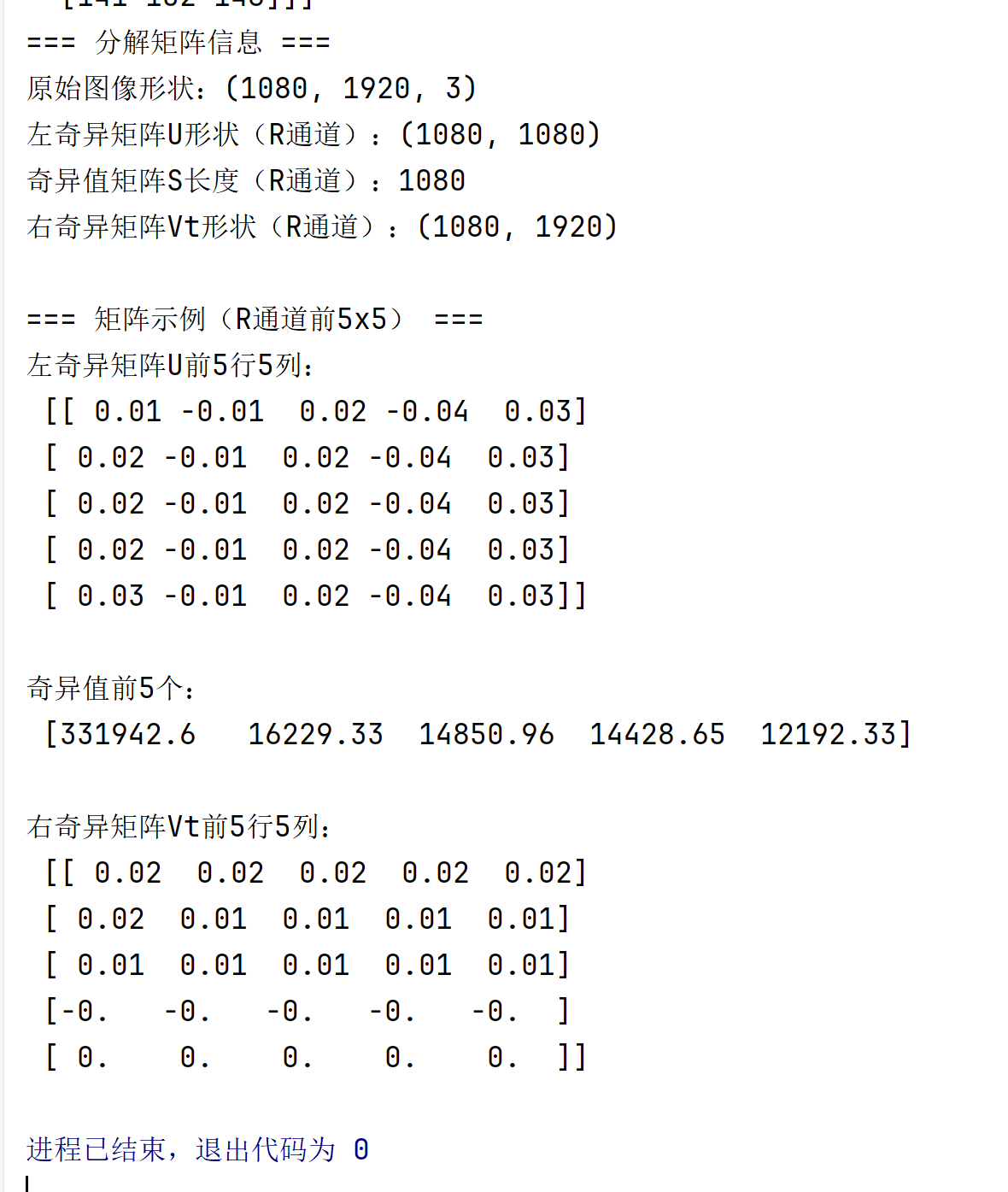
=== 分解矩阵信息 ===
原始图像形状: (1080, 1920, 3)
左奇异矩阵U形状: (1080, 1080)
奇异值矩阵S长度: 1080
右奇异矩阵Vt形状: (1080, 1920) === 矩阵示例(R通道前5×5) ===
左奇异矩阵U前5行5列:
[[0.01 -0.01 0.02 -0.04 0.03] [0.02 -0.01 0.02 -0.04 0.03] [0.02 -0.01 0.02 -0.04 0.03] [0.02 -0.01 0.02 -0.04 0.03] [0.03 -0.01 0.02 -0.04 0.03]] 奇异值前5个:
[331942.60, 16229.33, 14850.96, 14428.65, 12192.33]
(三)核心结论
- SVD 的有效性:通过截断奇异值可实现图像压缩,保留主要特征。
- 参数敏感性:k 直接影响图像质量,需根据需求平衡压缩率与清晰度。
- 矩阵意义:U 和 V 反映图像的空间特征方向,S 反映特征重要性排序。
六、总结
本次实验通过 Python 实现了基于 SVD 的图像处理,直观展示了数学理论在计算机视觉中的应用。通过调整保留的奇异值数量,我们深入理解了 SVD 在特征提取和数据压缩中的核心作用,为后续学习 PCA、图像降噪等算法奠定了基础。