STM32基础教程——硬件SPI
目录
前言
SPI硬件电路
SPI部分特征
SPI框图
SPI数据收发过程
W25Q64
技术实现
接线图
代码实现
技术要点
引脚操作
SPI初始化
SPI起始信号
SPI终止信号
SPI字节交换
宏替换W25Q64操作指令
W25Q64写使能
忙等待
读取设备ID号和制造商ID
页写入
数据读取
实验结果
问题记录
前言
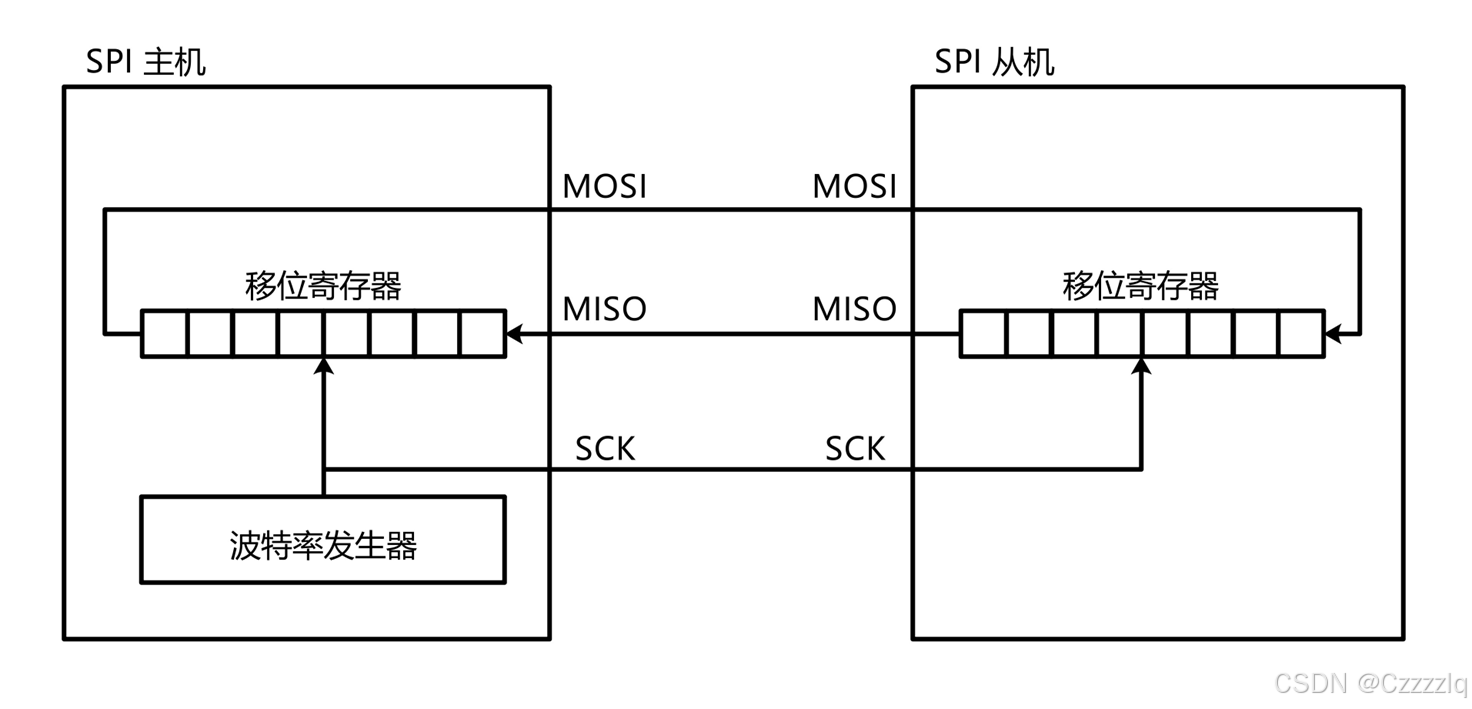
SPI(Serial Peripheral Interface,串行外设接口)是一种同步串行通信接口规范,主要用于短距离通信,广泛应用于嵌入式系统中。它使一个主设备能够与一个或多个从设备进行通信。SPI使用四条主要信号线:MOSI(主机输出/从机输入)、MISO(主机输入/从机输出)、SCK(串行时钟)和SS/CS(从选/片选)来实现数据的双向传输。这种接口方式支持全双工通信,具有传输速率高、延迟低的优点,但相比其他一些接口协议,使用的信号线较多。SPI常用于连接传感器、存储器、ADC(模数转换器)等外围设备。
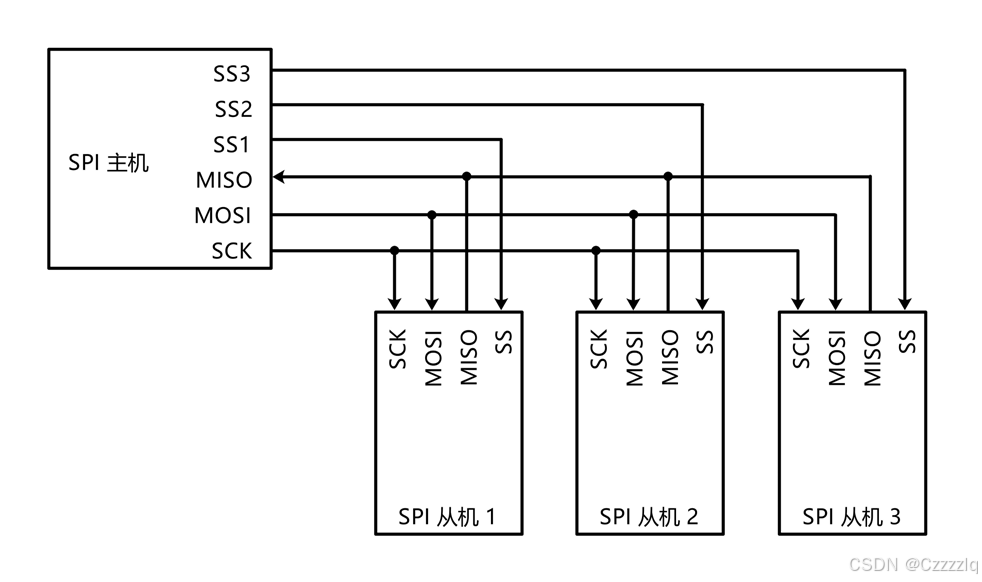
SPI硬件电路
- 所有SPI设备的SCK,MISO,MOSI分别连在一起。
- 主机另外引出多条CS控制线分别连接到各从机的CS引脚。
- 输出引脚配置为推挽输出,输入引脚配置为浮空输入或上拉输入。
SPI部分特征
- 3线(SCK,MISO,MOSI)全双工同步传输
- 带或不带第三根双向数据线的双线单工同步传输(只使用一根MISO或MOSI进行双向半双工数据传输)
- 8或16位传输帧格式选择
- 8个主模式波特率预分频系数(最大为fPCLK/2)
- 可编程的时钟极性和相位
- 可编程的数据顺序,MSB在前或LSB在前
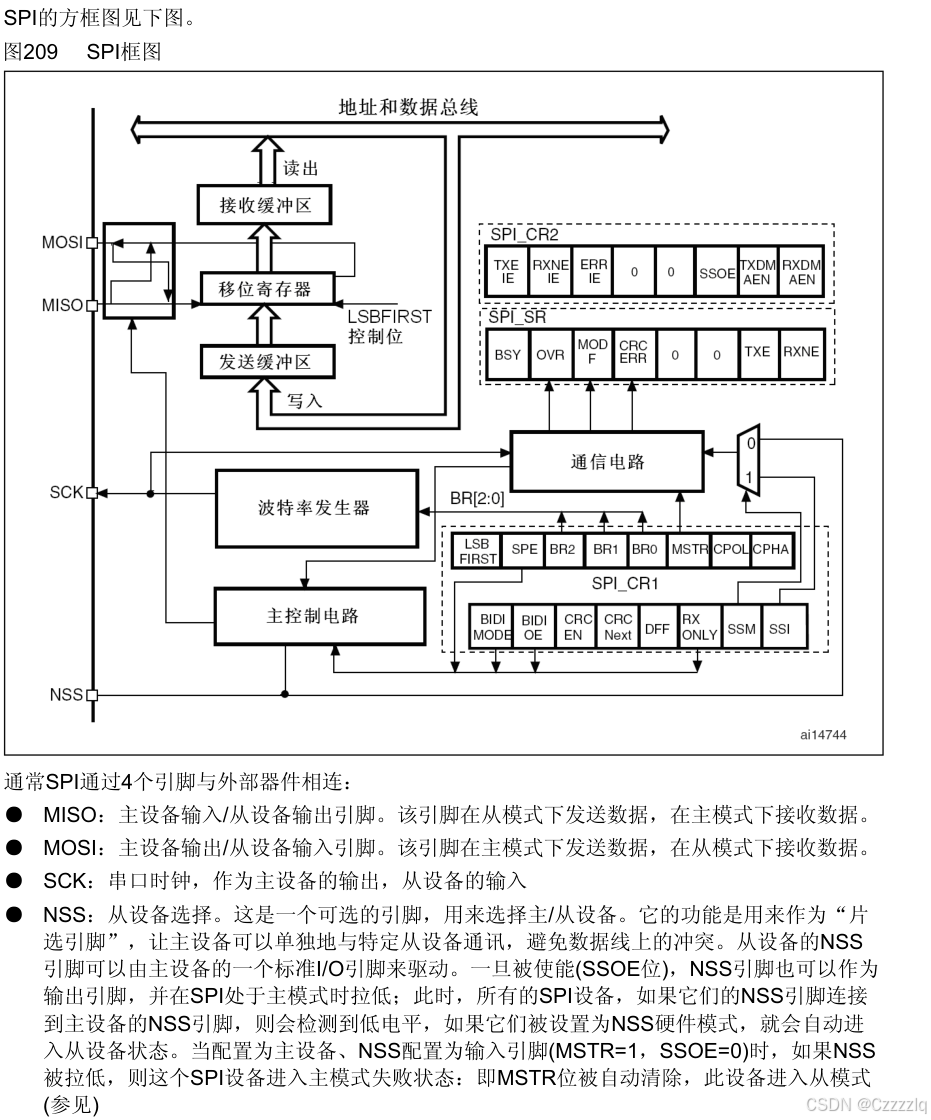
SPI框图
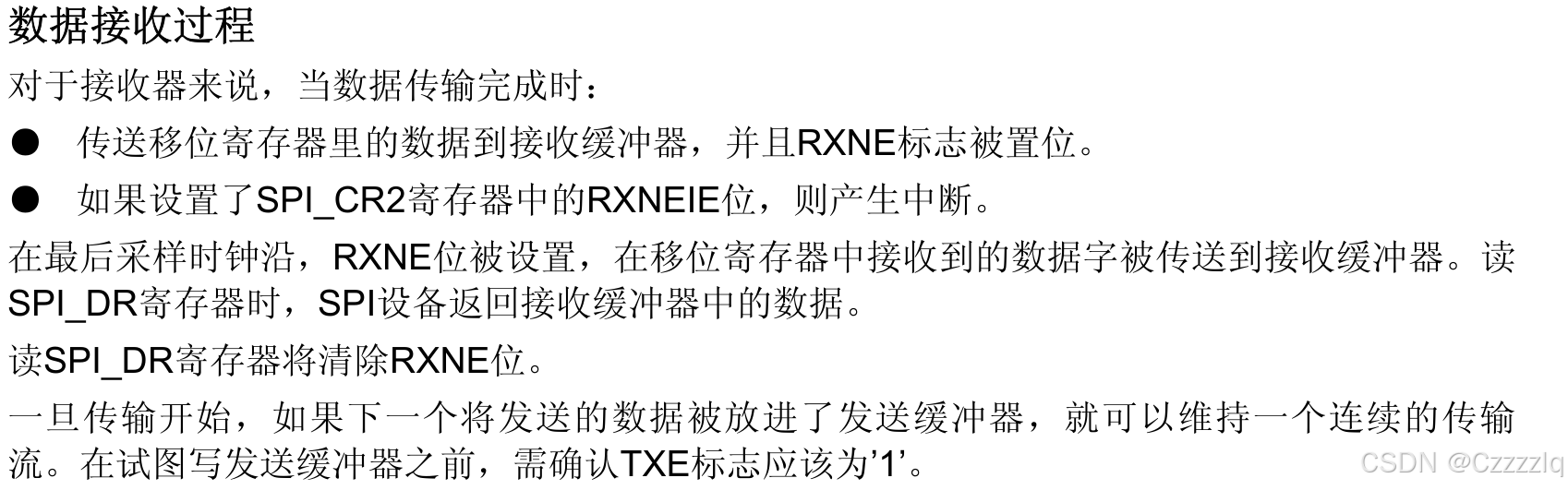
SPI数据收发过程
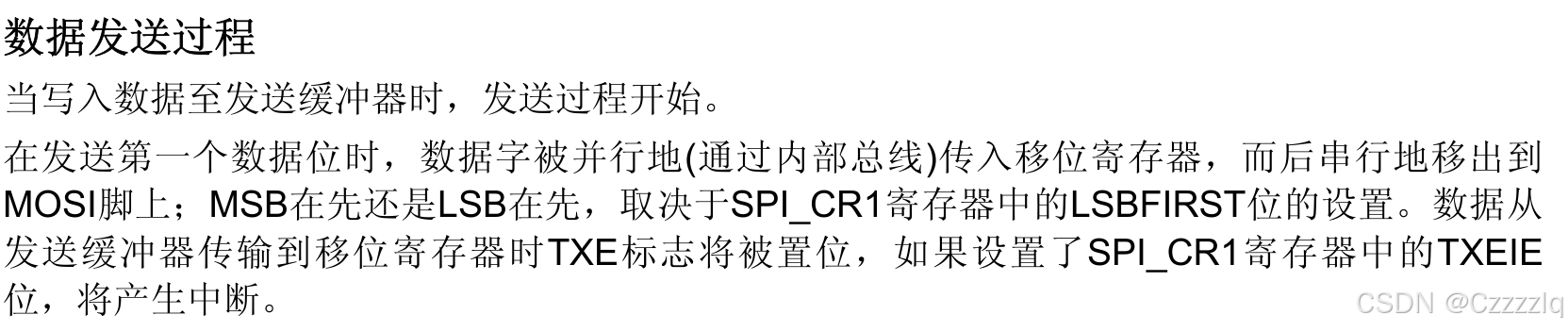
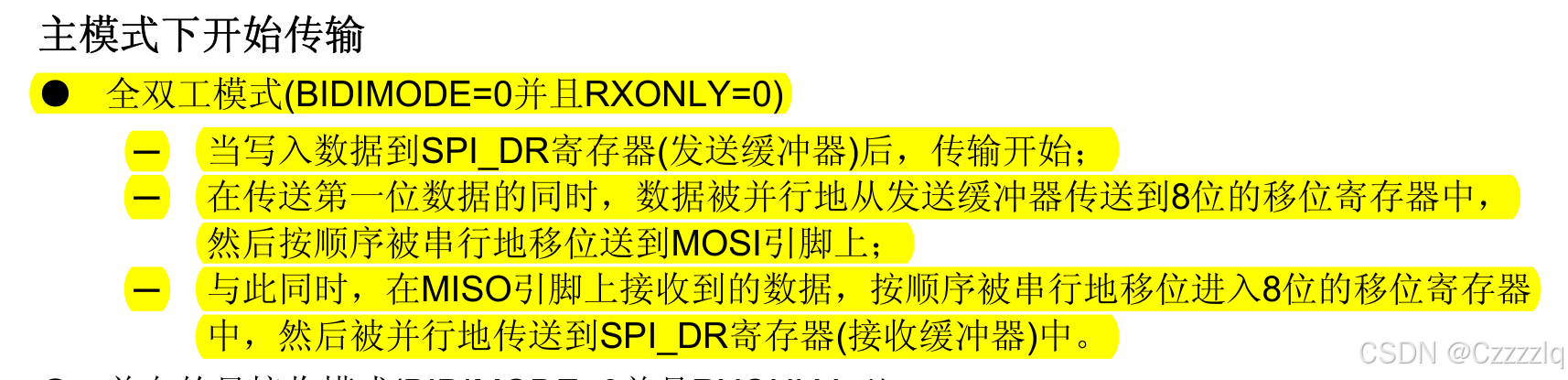
硬件SPI通常只使用非连续数据传输方式,时钟速率不需要太快。
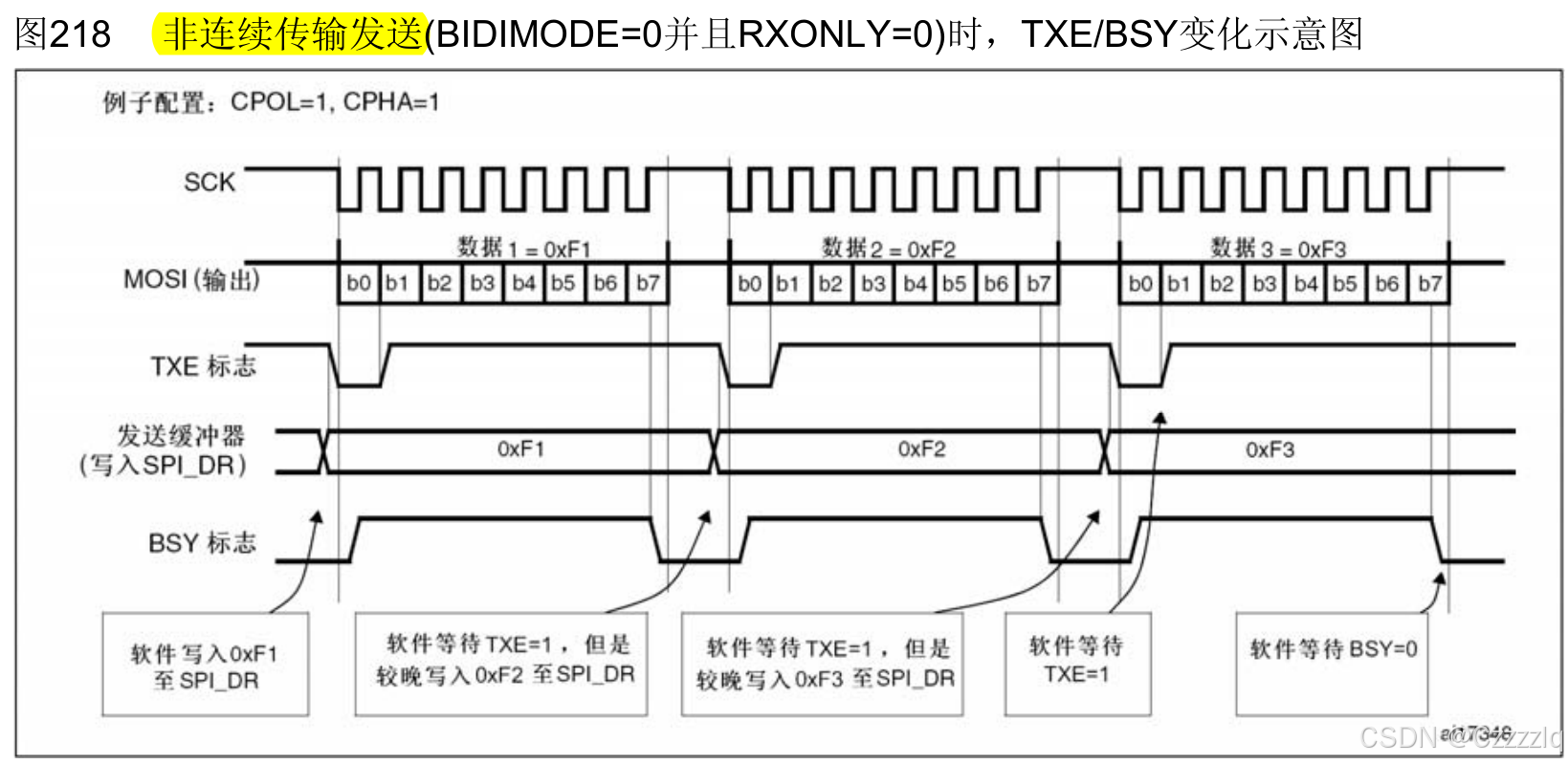
(模式3)SCK被拉低后发送起始信号,要发送的数据被写入SPI_DR寄存器,TXE被清零,表示发送缓冲数据寄存器非空,然后数据从缓冲数据寄存器移入移位寄存器,TXE标志被置位,表示发送数据缓冲器空,因为使用非连续传输方式,暂时不用进行数据写入。然后数据从移位寄存器移出,一个时钟信号移出1位,同时从MISO移入数据接收缓冲寄存器一位,连续8个时钟信号后,一个字节的数据移出,一个字节的数据移入,完成一个字节数据的交换。读取SPI_SR寄存器的RXNE位判断接收数据寄存器内是否接收到数据。读出数据后方可进行下一个字节的写入与接收。
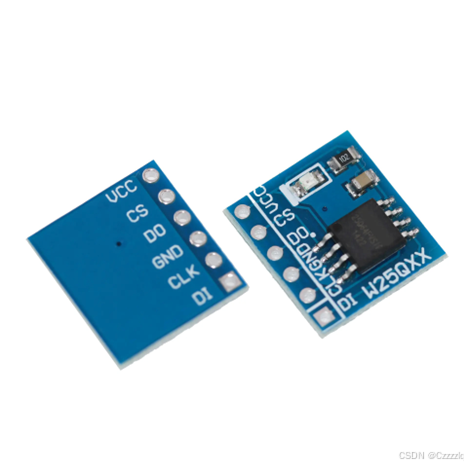
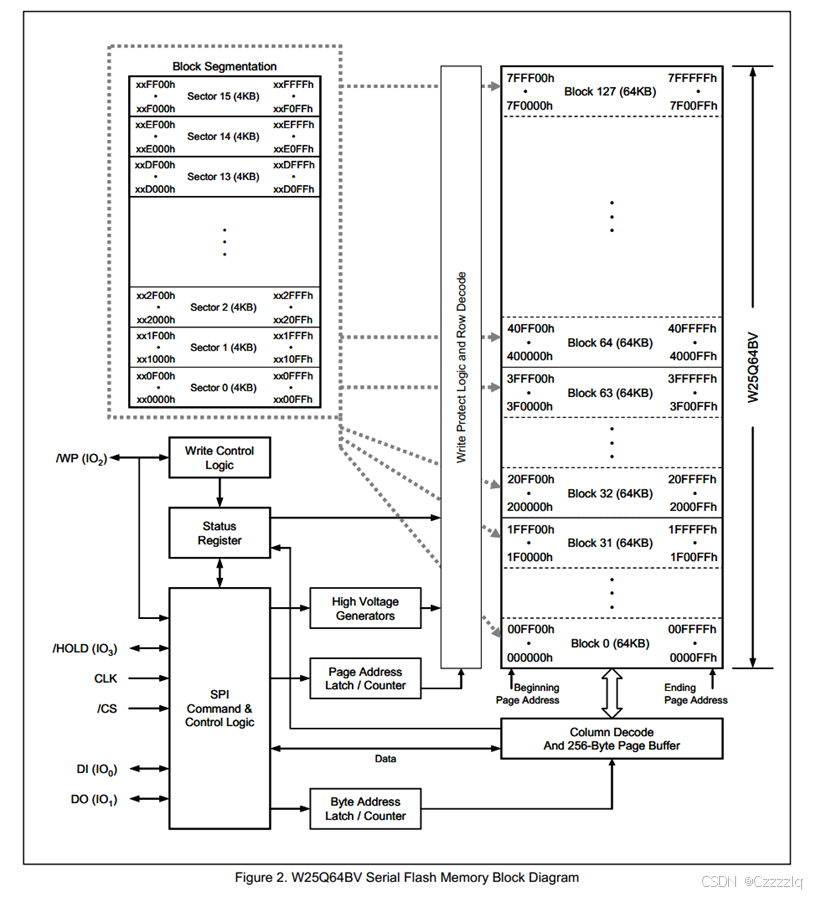
W25Q64
W25Q64是华邦公司(Winbond)推出的一款基于SPI通信的大容量闪存产品,其存储容量为64Mb(即8MB)。该芯片支持2.7~3.6V的工作电压范围,并且具备至少10万次的擦写周期和长达20年的数据保存时间。W25Q64以其灵活性和出色的性能著称,非常适合用于存储声音、文本和数据等应用。它被组织为32768个可编程页面,每个页面包含256字节的数据。此外,W25Q64还支持多种擦除命令,包括4KB扇区擦除、32KB块擦除、64KB块擦除以及全片擦除,并且兼容标准SPI模式0和模式3,最高支持133MHz的时钟频率。通过SPI接口,W25Q64可以轻松地与各种微控制器进行集成,实现高效的数据读写操作。
W25Q64由8MB的存储容量,存储区域被划分成了128个块,每个块又被划分成了16个扇区,每个扇区又被划分成了 16个页。
W25Q64写入操作时:
- 在写入操作之前,必须先进行写使能。
- 每个数据为只能有1改写成0,不能由0改写成1。
- 写入数据之前必须先擦除,擦除后,所有的数据位都变为1。
- 擦除必须以最小单元擦除(这里最小擦除单元时4kb扇区)。
- 连续写入多个字节时最多写入一页的数据(256Byte),超过页尾的数据会回到页首覆盖写入。
- 写入操作完成后,芯片进入忙状态,不响应新的写操作。
W25Q64读操作时:
- 直接调取读操作时序,无需写使能,无需其他操作,没有页限制,读取操作完成后芯片不会进入忙状态,但是芯片忙状态时不能进行读操作。
技术实现
原理图
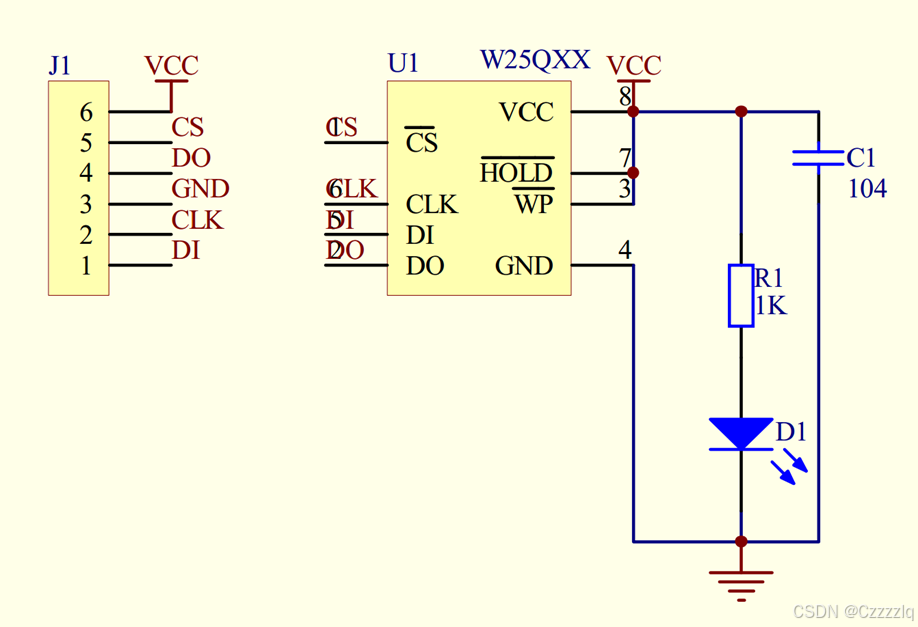
接线图
代码实现
main.c
/**********************************************************
1.实验名称:硬件SPI读写W25Q64
2.实验环境:STM32F103C8T6最小系统板
3.实验内容:使用SPI外设实现读写W25Q64
4.作者;abai
5.实验时间:2025-5-7
**********************************************************/
#include "stm32f10x.h" // Device header
#include "Delay.h" //延时函数
#include "OLED.h"
#include "W25Q64.h"uint8_t MF;
uint16_t ID;
uint8_t SendArry[] = {0x05,0x06,0x07,0x08};
uint8_t ReceiveArry[4];int main(void)
{/*OLED初始化*/OLED_Init();W25Q64_Init();OLED_ShowString(1,1,"MF:");OLED_ShowString(2,1,"ID:");OLED_ShowString(3,1,"W:");OLED_ShowString(4,1,"R:");W25Q64_SectorErase(0x000000); //写入数据之前必须页擦除W25Q64_PageProgram(0x000000,SendArry,4);W25Q64_ReadData(0x000000,ReceiveArry,4);W25Q64_ReadID(&MF,&ID);OLED_ShowHexNum(3,3,SendArry[0],2);OLED_ShowHexNum(3,5,SendArry[1],2);OLED_ShowHexNum(3,7,SendArry[2],2);OLED_ShowHexNum(3,9,SendArry[3],2);OLED_ShowHexNum(4,3,ReceiveArry[0],2);OLED_ShowHexNum(4,5,ReceiveArry[1],2);OLED_ShowHexNum(4,7,ReceiveArry[2],2);OLED_ShowHexNum(4,9,ReceiveArry[3],2);OLED_ShowHexNum(1,4,MF,2);OLED_ShowHexNum(2,4,ID,4);while(1){}
}
MySPI.h
#ifndef MYSPI_H
#define MYSPI_H#include "stm32f10x.h" // Device headervoid MySPI_Init(void);
void MySPI_CS_W(uint8_t BitValue);
void MySPI_SCK_W(uint8_t BitValue);
void MySPI_MOSI_W(uint8_t BitValue);
uint8_t MySPI_MISO_R(void);
void MySPI_Start(void);
void MySPI_Stop(void);
uint8_t MySPI_SwapByte(uint8_t ByteValue);#endif
MySPI.c
#include "MySPI.h"/***@brief SPI初始化*@param None*@retval None**/
void MySPI_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE);//GPIOGPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStruct);GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStruct);GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; //上拉输入GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStruct);//SPISPI_InitTypeDef SPI_InitStruct;SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_128; //SPI时钟采用32分频SPI_InitStruct.SPI_CPHA = SPI_CPHA_1Edge; //选择第几个上升沿捕获数据SPI_InitStruct.SPI_CPOL = SPI_CPOL_Low; //时钟默认为低电平SPI_InitStruct.SPI_CRCPolynomial = 7; //CRC校验,这里不使用给一个默认值7SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b; //数据字节长度为8SPI_InitStruct.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //数据传输采用双向全双工SPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB; //数据传输采用高位在前SPI_InitStruct.SPI_Mode = SPI_Mode_Master; //SPI主模式SPI_InitStruct.SPI_NSS = SPI_NSS_Soft; //使用GPIO模拟CS,这里设置为软件控制即可SPI_Init(SPI1,&SPI_InitStruct);//使能SPISPI_Cmd(SPI1,ENABLE);//默认CS为高电平MySPI_CS_W(1);
}/***@brief SPI CS控制*@param BitValue 要写入CS的位数据*@retval None**/
void MySPI_CS_W(uint8_t BitValue)
{GPIO_WriteBit(GPIOA,GPIO_Pin_4,(BitAction)BitValue);
}/***@brief SPI起始信号*@param None*@retval None**/
void MySPI_Start(void)
{MySPI_CS_W(0); //将片选信号拉低发送起始信号
}/***@brief SPI终止信号*@param None*@retval None**/
void MySPI_Stop(void)
{MySPI_CS_W(1); //将片选信号拉高发送终止信号
}/***@brief SPI交换字节*@param None*@retval 交换的字节**/
uint8_t MySPI_SwapByte(uint8_t ByteValue)
{while(!SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE));SPI_I2S_SendData(SPI1,ByteValue);while(!SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_RXNE));return SPI_I2S_ReceiveData(SPI1);
}
W25Q64_Ins.h
#ifndef W25Q64_INS_H
#define W25Q64_INS_H#define W25Q64_WRITEENABLE 0x06
#define W25Q64_READSTATUSREGISTER1 0x05
#define W25Q64_PAGEPROGRAM 0x02
#define W25Q64_SECTORERASE4KB 0x20
#define W25Q64_JEDECID 0X9F
#define W25Q64_READDATA 0x03
#define W25Q64_DUMMY_BYTE 0xFF#endif
W25Q64.h
#ifndef W25Q64_H
#define W25Q64_H#include "stm32f10x.h" // Device header
#include "MySPI.h"void W25Q64_Init(void);
void W25Q64_ReadID(uint8_t* MF, uint16_t*ID);
void W25Q64_WriteEnable(void);
void W25Q64_WaitBusy(void);
void W25Q64_PageProgram(uint32_t Address, uint8_t* DataArry, uint16_t Count);
void W25Q64_SectorErase(uint32_t Address);
void W25Q64_ReadData(uint32_t Address,uint8_t* DataArry, uint32_t Count);#endif
W25Q64.c
#include "W25Q64.h"
#include "W25Q64_Ins.h"/***@brief W25Q64初始化*@param None*@retval None**/
void W25Q64_Init(void)
{MySPI_Init();
}/***@brief W25Q64ID读取*@param None*@retval None**/
void W25Q64_ReadID(uint8_t* MF, uint16_t*ID)
{MySPI_Start();//发送读取ID指令MySPI_SwapByte(W25Q64_JEDECID);//发送空指令交换数据*MF = MySPI_SwapByte(W25Q64_DUMMY_BYTE); //随便发送一个数据用于与从机交换数据,一般使用0xFF或0x00*ID = MySPI_SwapByte(W25Q64_DUMMY_BYTE);*ID <<= 8;*ID |= MySPI_SwapByte(W25Q64_DUMMY_BYTE);MySPI_Stop();
}/***@brief W25Q64ID写使能*@param None*@retval None**/
void W25Q64_WriteEnable(void)
{MySPI_Start();//发送写使能指令MySPI_SwapByte(W25Q64_WRITEENABLE);MySPI_Stop();
}/***@brief W25Q64ID忙等待*@param None*@retval None**/
void W25Q64_WaitBusy(void)
{MySPI_Start();//发送读状态寄存器指令MySPI_SwapByte(W25Q64_READSTATUSREGISTER1);//等待BUSY位清零,则从设备退出忙状态while((MySPI_SwapByte(W25Q64_DUMMY_BYTE) & 0X01) == 0X01);MySPI_Stop();
}/***@brief W25Q64ID页写入*@param None*@retval None**/
void W25Q64_PageProgram(uint32_t Address, uint8_t* DataArry, uint16_t Count)
{uint16_t i;W25Q64_WriteEnable(); //写使能MySPI_Start();MySPI_SwapByte(W25Q64_PAGEPROGRAM);//发送24位地址MySPI_SwapByte(Address>>16);MySPI_SwapByte(Address>>8);MySPI_SwapByte(Address);//发送指定数量的数据for(i=0;i<Count;i++){MySPI_SwapByte(DataArry[i]);}MySPI_Stop();W25Q64_WaitBusy(); //事后等待忙状态
}/***@brief W25Q64ID指定扇区擦除*@param None*@retval None**/
void W25Q64_SectorErase(uint32_t Address)
{ W25Q64_WriteEnable();MySPI_Start();MySPI_SwapByte(W25Q64_SECTORERASE4KB);//发送24位地址MySPI_SwapByte(Address>>16);MySPI_SwapByte(Address>>8);MySPI_SwapByte(Address);MySPI_Stop();W25Q64_WaitBusy();
}/***@brief W25Q64ID读取数据*@param None*@retval None*@note 数据接收的数量也要指定,不然无法停止数据读取操作**/
void W25Q64_ReadData(uint32_t Address,uint8_t* DataArry, uint32_t Count)
{uint32_t i;MySPI_Start();MySPI_SwapByte(W25Q64_READDATA);//发送24位地址MySPI_SwapByte(Address>>16);MySPI_SwapByte(Address>>8);MySPI_SwapByte(Address);for(i=0;i<Count;i++){DataArry[i] = MySPI_SwapByte(W25Q64_DUMMY_BYTE);}MySPI_Stop();
}
OLED部分代码参照文章《STM32基础教程——OLED显示》
技术要点
引脚操作
/***@brief SPI CS控制*@param BitValue 要写入CS的位数据*@retval None**/
void MySPI_CS_W(uint8_t BitValue)
{GPIO_WriteBit(GPIOA,GPIO_Pin_4,(BitAction)BitValue);
}
对单个引脚的操作进行封装,用于模拟SPI引脚电平翻转用于控制CS信号。
SPI初始化
/***@brief SPI初始化*@param None*@retval None**/
void MySPI_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE);//GPIOGPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStruct);GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStruct);GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; //上拉输入GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStruct);//SPISPI_InitTypeDef SPI_InitStruct;SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_128; //SPI时钟采用128分频SPI_InitStruct.SPI_CPHA = SPI_CPHA_1Edge; //选择第几个上升沿捕获数据SPI_InitStruct.SPI_CPOL = SPI_CPOL_Low; //时钟默认为低电平SPI_InitStruct.SPI_CRCPolynomial = 7; //CRC校验,这里不使用给一个默认值7SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b; //数据字节长度为8SPI_InitStruct.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //数据传输采用双向全双工SPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB; //数据传输采用高位在前SPI_InitStruct.SPI_Mode = SPI_Mode_Master; //SPI主模式SPI_InitStruct.SPI_NSS = SPI_NSS_Soft; //使用GPIO模拟CS,这里设置为软件控制即可SPI_Init(SPI1,&SPI_InitStruct);//使能SPISPI_Cmd(SPI1,ENABLE);//默认CS为高电平MySPI_CS_W(1);
}SPI初始化,先初始化GPIO,PA4作为软件发送CS信号的引脚,应初始化为推挽输出。PA5和PA7作为外设SPI的SCK和MOSI引脚,应初始化为复用推挽输出,PA6引脚作为MISO引脚,用于接收数据输入,初始化为上拉输入。
SPI1初始化,时钟分频选择128分频,SPI1为APB2外设,系统时钟为72MHz,经分频后时钟频率为562.5kHz。设置第一个边沿数据移入,且默认时钟为低电平。将SPI设置为主模式下双向全双工模式,数据长度设置为8位,数据传输高位在前。其余杂项CRC校验设为默认值,NSS在本实验不使用,设置为软件控制。将片选信号初始化为高电平。
SPI起始信号
SPI的起始时序是CS(SS)从高电平切换为低电平 。
/***@brief SPI起始信号*@param None*@retval None**/
void MySPI_Start(void)
{MySPI_CS_W(0); //将片选信号拉低发送起始信号
}SPI终止信号
SPI的终止时序是CS(SS)从低电平切换为高电平 。
/***@brief SPI终止信号*@param None*@retval None**/
void MySPI_Stop(void)
{MySPI_CS_W(1); //将片选信号拉高发送终止信号
}SPI字节交换
SPI为同步全双工通信,每一次通信都会进行数据交换。
/***@brief SPI交换字节*@param None*@retval 交换的字节**/
uint8_t MySPI_SwapByte(uint8_t ByteValue)
{while(!SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE));SPI_I2S_SendData(SPI1,ByteValue);while(!SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_RXNE));return SPI_I2S_ReceiveData(SPI1);
}
硬件SPI交换字节数据,先等待TXE标志位置位,表示发送数据缓冲寄存器为空,方可向发送数据缓冲寄存器写入数据,硬件SPI会在数据写入发送数据寄存器后自动完成数据发送,无需手动操作。然后只需等待数据接收寄存器的标志位RXNE被置位即可,当RXNE被置位后,说明数据接收寄存器已接收到从机发来的数据,此时将数据读出即可。
宏替换W25Q64操作指令
#ifndef W25Q64_INS_H
#define W25Q64_INS_H#define W25Q64_WRITEENABLE 0x06
#define W25Q64_READSTATUSREGISTER1 0x05
#define W25Q64_PAGEPROGRAM 0x02
#define W25Q64_SECTORERASE4KB 0x20
#define W25Q64_JEDECID 0X9F
#define W25Q64_READDATA 0x03
#define W25Q64_DUMMY_BYTE 0xFF#endif
将对W25Q64操作的命令使用宏代替, 提高代码的便捷性和可读性。
W25Q64写使能
/***@brief W25Q64ID写使能*@param None*@retval None**/
void W25Q64_WriteEnable(void)
{MySPI_Start();//发送写使能指令MySPI_SwapByte(W25Q64_WRITEENABLE);MySPI_Stop();
}将写使能操作封装,方便使用。主机与从机交换数据,发送写使能命令,对从机进行写使能操作。
忙等待
/***@brief W25Q64ID忙等待*@param None*@retval None**/
void W25Q64_WaitBusy(void)
{MySPI_Start();//发送读状态寄存器指令MySPI_SwapByte(W25Q64_READSTATUSREGISTER1);//等待BUSY位清零,则从设备退出忙状态while((MySPI_SwapByte(W25Q64_DUMMY_BYTE) & 0X01) == 0X01);MySPI_Stop();
}发送读取状态寄存器1的命令,判断BUSY位的状态,使用while循环等待芯片退出忙状态将BUSY位清零。
读取设备ID号和制造商ID
/***@brief W25Q64ID读取*@param None*@retval None**/
void W25Q64_ReadID(uint8_t* MF, uint16_t*ID)
{MySPI_Start();//发送读取ID指令MySPI_SwapByte(W25Q64_JEDECID);//发送空指令交换数据*MF = MySPI_SwapByte(W25Q64_DUMMY_BYTE); //随便发送一个数据用于与从机交换数据,一般使用0xFF或0x00*ID = MySPI_SwapByte(W25Q64_DUMMY_BYTE);*ID <<= 8;*ID |= MySPI_SwapByte(W25Q64_DUMMY_BYTE);MySPI_Stop();
}主机发送读取JEDEC ID的命令,从机向主机发送数据,数据格式为第一个字节为制造商ID,第二个和第三个字节为设备ID。这里使用指针进行数据操作。
页写入
/***@brief W25Q64ID页写入*@param None*@retval None**/
void W25Q64_PageProgram(uint32_t Address, uint8_t* DataArry, uint16_t Count)
{uint16_t i;W25Q64_WriteEnable(); //写使能MySPI_Start();MySPI_SwapByte(W25Q64_PAGEPROGRAM);//发送24位地址MySPI_SwapByte(Address>>16);MySPI_SwapByte(Address>>8);MySPI_SwapByte(Address);//发送指定数量的数据for(i=0;i<Count;i++){MySPI_SwapByte(DataArry[i]);}MySPI_Stop();W25Q64_WaitBusy(); //事后等待忙状态
}页写入操作,先进行写使能,然后发送起始信号,发送页写入命令。然后发送24位地址,高16位为页地址,低八位为字节地址。使用for循环写入指定数量的数据,数据的数量不应超过256字节。最后发送停止信号,然后进行芯片忙等待操作(忙等待如果加在函数开始,那读取操作也要加忙等待函数调用,这样会使操作更复杂。)。所有写操作函数与本函数类似,不再赘述。
数据读取
/***@brief W25Q64ID读取数据*@param None*@retval None*@note 数据接收的数量也要指定,不然无法停止数据读取操作**/
void W25Q64_ReadData(uint32_t Address,uint8_t* DataArry, uint32_t Count)
{uint32_t i;MySPI_Start();MySPI_SwapByte(W25Q64_READDATA);//发送24位地址MySPI_SwapByte(Address>>16);MySPI_SwapByte(Address>>8);MySPI_SwapByte(Address);for(i=0;i<Count;i++){DataArry[i] = MySPI_SwapByte(W25Q64_DUMMY_BYTE);}MySPI_Stop();
}数据读取操作无需写使能,无需进行其他操作。发送读数据命令,然后发送24位地址,同样高16位地址为页地址,低八位为字节地址。读取操作不受页限制。
实验结果
问题记录
暂无