空域伦理与AI自主边界的系统建构
在AI无人系统逐步参与城市空域治理的过程中,系统的“自主性”已不再仅是技术指标,而是直接影响合规性、安全性与社会接受度的伦理边界议题。AI决策系统是否拥有“强干预能力”?行为触发责任应归属何方?算法可否调优至“自我纠偏”?这些问题的回答将决定AI集群是否能成为可信赖的城市基础设施。本文提出“空域AI伦理系统框架”,从三大边界构建出发,探讨AI系统在空域中所应承担的权能边界、控制边界与责任边界,并结合睿途在系统设计中对于“自我限制能力”“伦理可审计性”与“边界型接口规范”的工程实践,提出未来空域AI治理的伦理建构路径。
一、空域AI的三类边界系统认知
1.1 权能边界:AI系统的权限能触达何处?
- 决策权(任务生成、自调路径)与行动权(自动飞行、规避、任务执行)
- 睿途定义“边界权属图谱”:以任务等级、城市监管状态、任务所属域决定AI权能调度等级

1.2 控制边界:当AI偏离期望行为轨迹,谁来校正?
- 睿途提出“多通道干预系统”:支持监管平台、飞手、算法自我评估三种校正入口
- 系统设计中保留“预留控制中断点”与“飞行行为回滚机制”

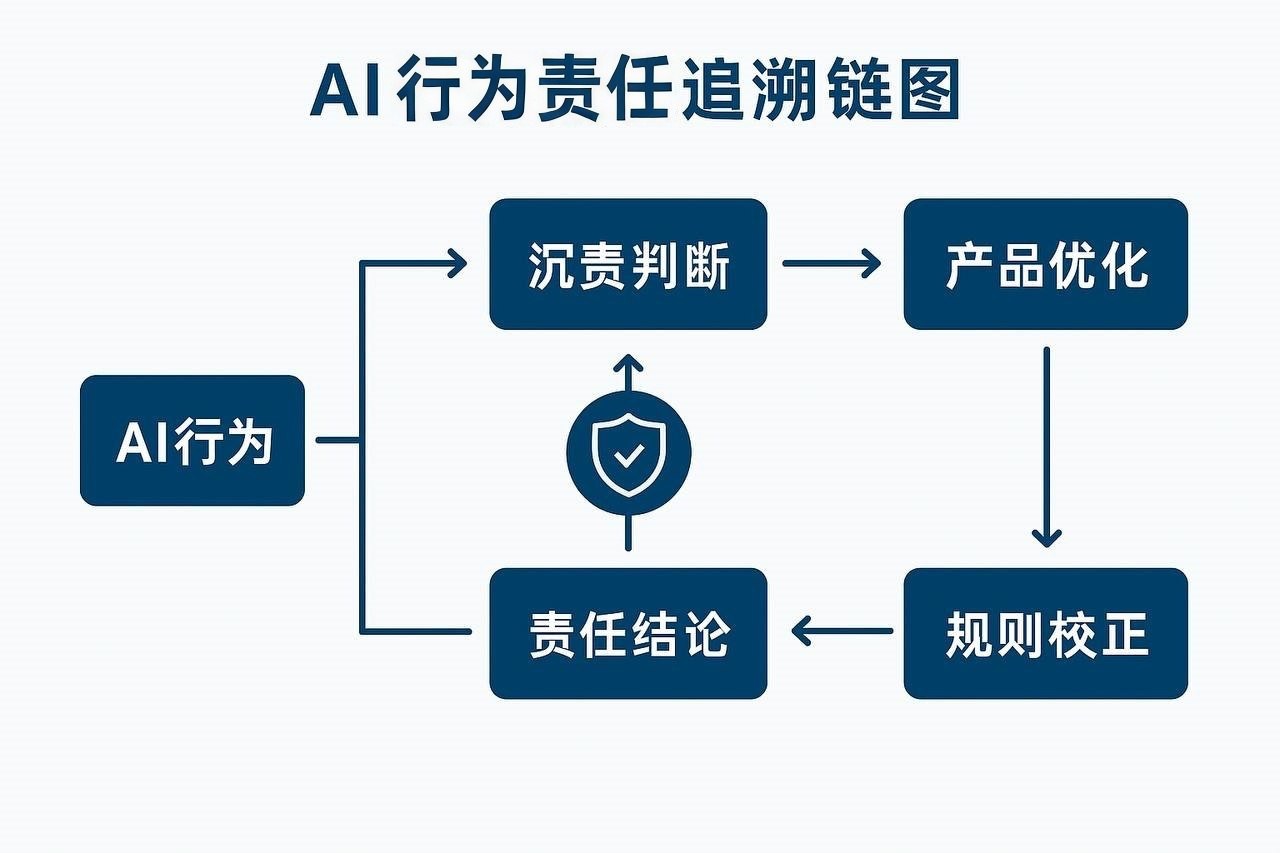
1.3 责任边界:决策后果由谁承担?
- 责任可追:任务接入日志、行为轨迹链、调度策略HASH可溯源
- 责任可裁:AI-人工行为时序重叠解析,辅助判断主次责任归属
二、空域AI伦理系统框架设计
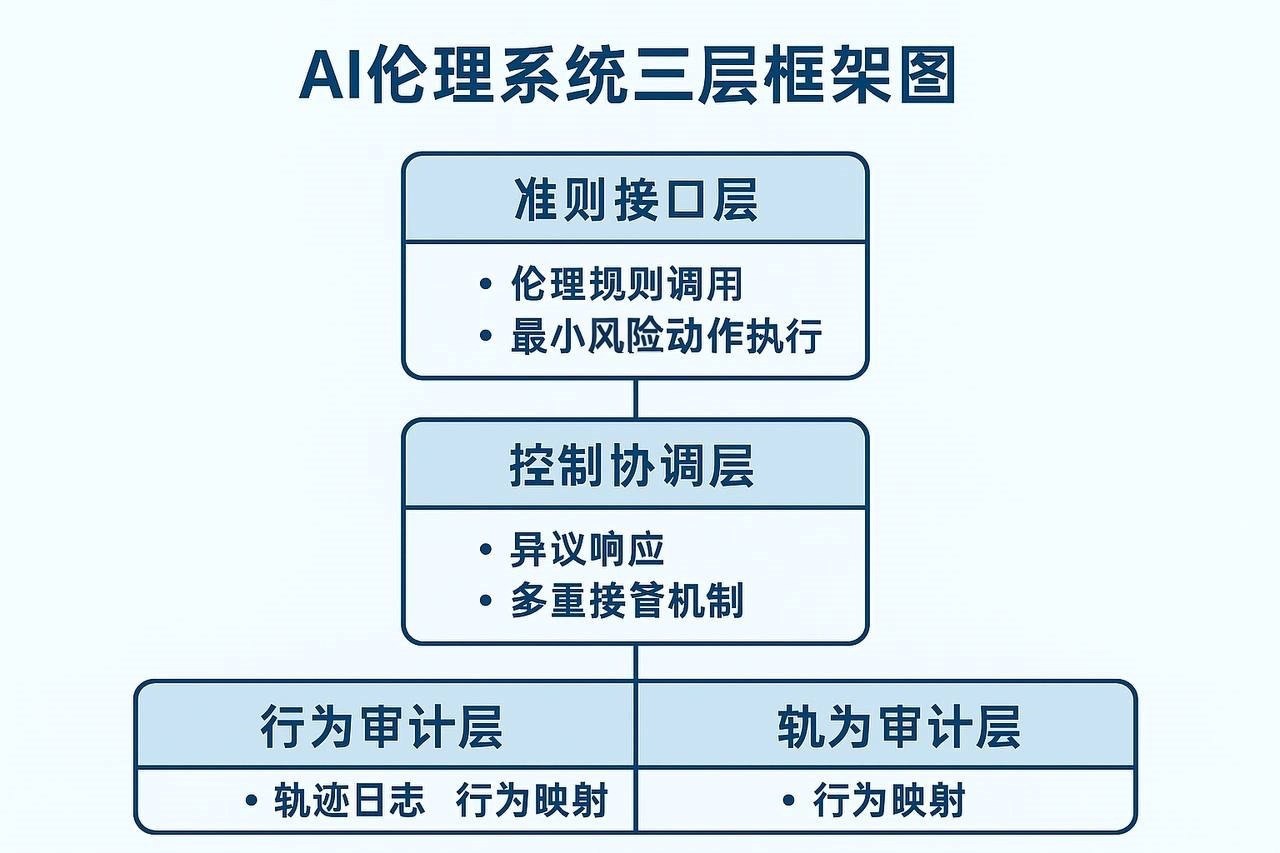
2.1 三层结构:底层行为审计层 + 中层控制协调层 + 顶层伦理准则接口层
- 行为审计:日志 + 策略映射
- 控制协调:异议响应 / 多元接管 / 状态权重冲突管理
- 准则接口:伦理规则外调用机制,如“最小风险动作”强制执行器
2.2 工程落地路径:
- 飞控端:荷鲁斯之眼支持“行为安全模式 + 接管信号插口 + 可回滚栈”
- 平台端:RT-AI支持“伦理准则图+行为节点审查器+状态冲突裁定器”
- 接口层:第三方伦理中介可接入系统形成治理闭环
三、睿途边界型接口实践案例
3.1 行为图谱中设置“高风险节点红线标记”
- 标记如“异动路径偏离”“多重规避失败”“信号异常持续”触发边界拦截
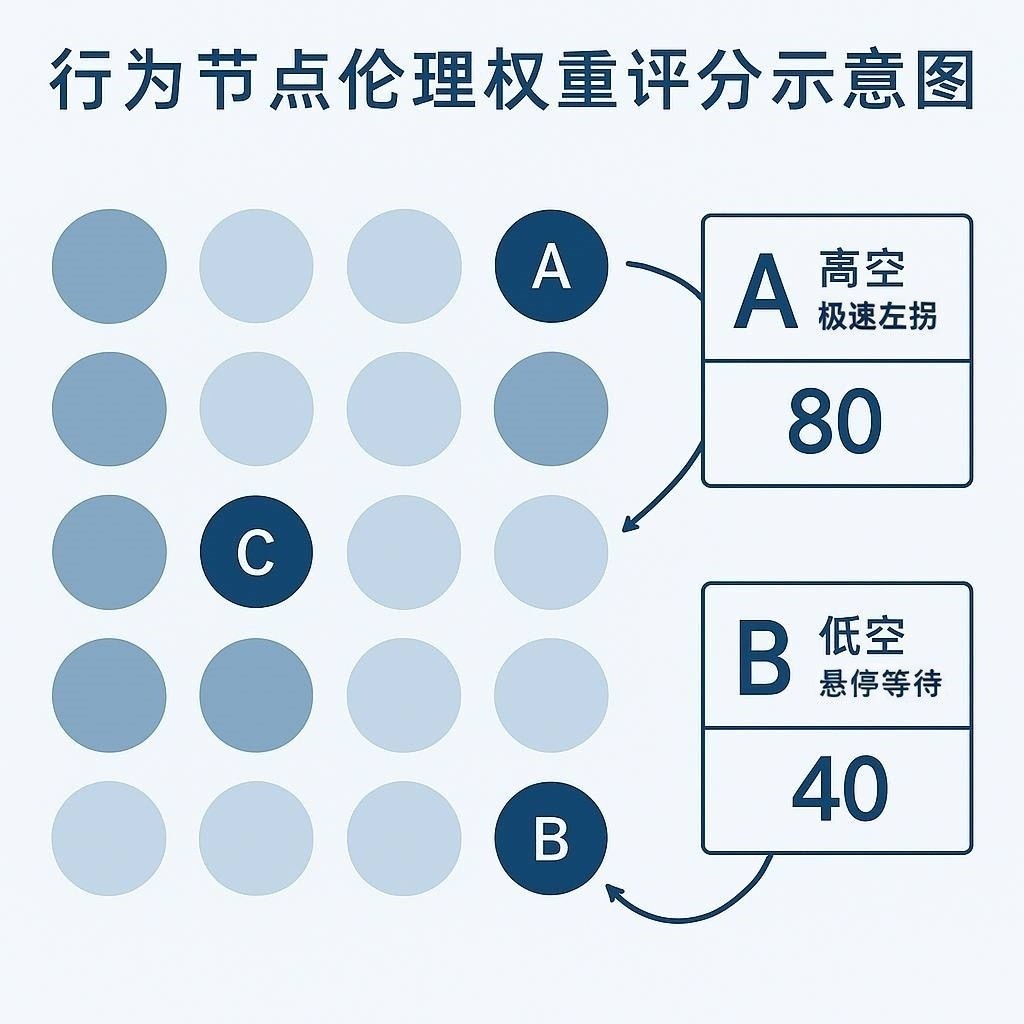
3.2 决策链中嵌入“伦理权重评分系统”
- 每一行为节点附带“伦理权重值”(如对人影响、数据敏感性)
- 系统在路径规划中引入“伦理成本函数”,用于优化调度选择
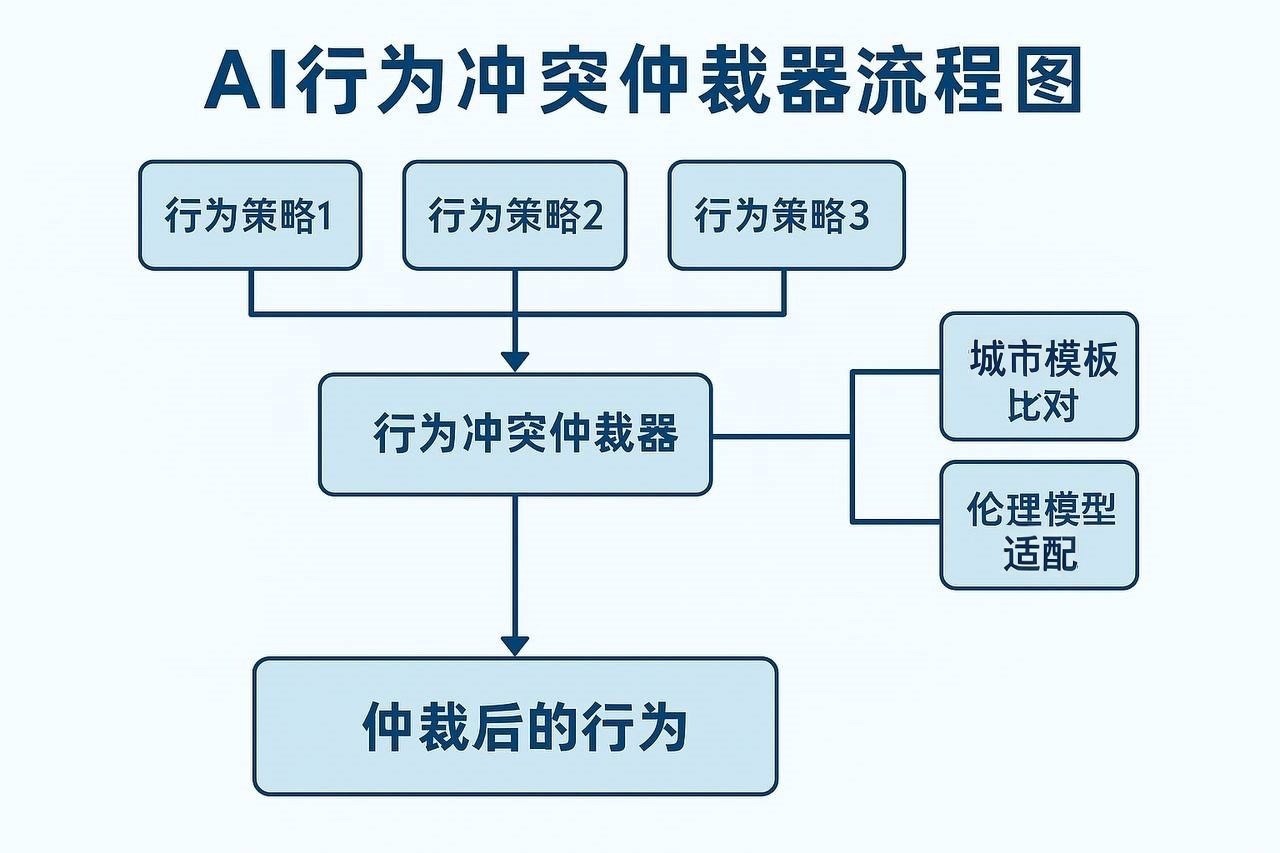
3.3 睿途接入“AI行为冲突仲裁器”试点
- 多飞控算法冲突时由仲裁器判定优先执行权
- 可外部植入城市伦理模型模板,用于跨城市/行业适配
结语
AI无人系统若想成为可信赖的空域基础设施,不只是要“能飞”,更要“飞得对”。空域伦理不是对技术的否定,而是其社会适配能力的升级要求。睿途所推动的“边界型AI系统架构”试图在飞行自由与治理约束之间,找到一条“可信可控”的中道路径,为未来空域治理中的伦理透明化、责任清晰化与决策共识化提供操作范式。