高自由度与多功能指尖设计:Allegro灵巧手V5(4F Plus)的技术亮点
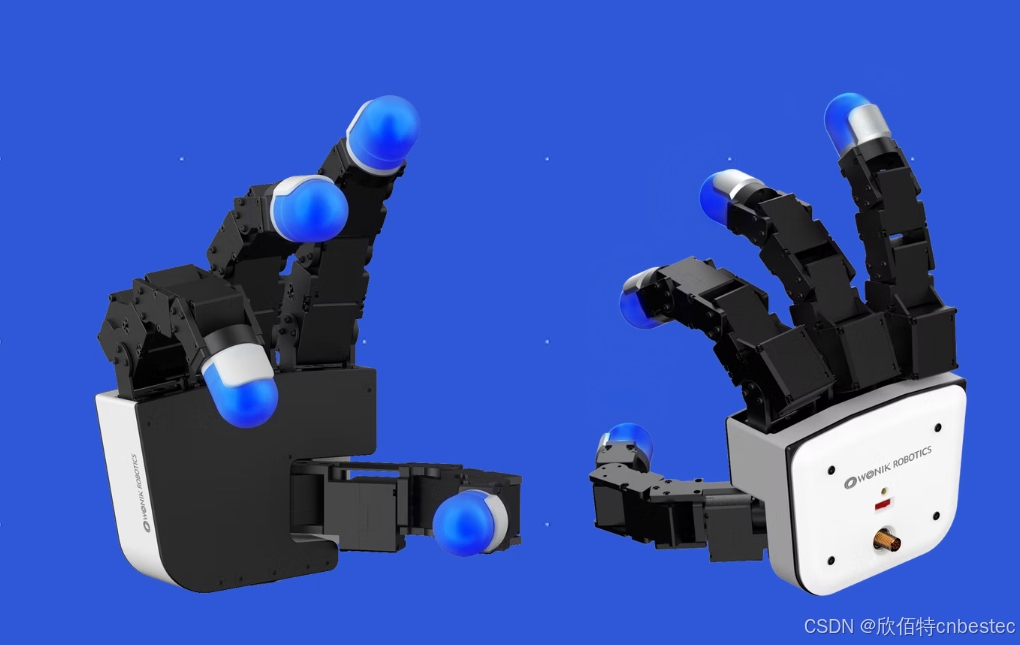
Allegro Hand V5(4F Plus)是一款先进的灵巧手,采用多关节结构,具备16个自由度,能够模拟人类手部的灵活运动。每根手指分配4个自由度,使其能够进行复杂的抓取和操作。该产品特别适用于研究和工业应用,提供低成本的灵巧操作解决方案。

V5(4F Plus)配备多种现成的抓取算法,能够处理各种物体几何形状,大大地提升了其适用性。此外,手指形状的360度全向压力敏感触觉传感器,使得机械手在操作过程中能够感知物体的压力变化,提供更为精确的控制。

Allegro Hand V5(4F Plus)的16个独立电流控制关节(每根手指4个自由度)使其在实时控制和在线模拟方面表现出色。每个指尖都配备了全向触觉传感器,支持多种类型的研究,能够灵活地操控从刚性到可变形软材料的物体。
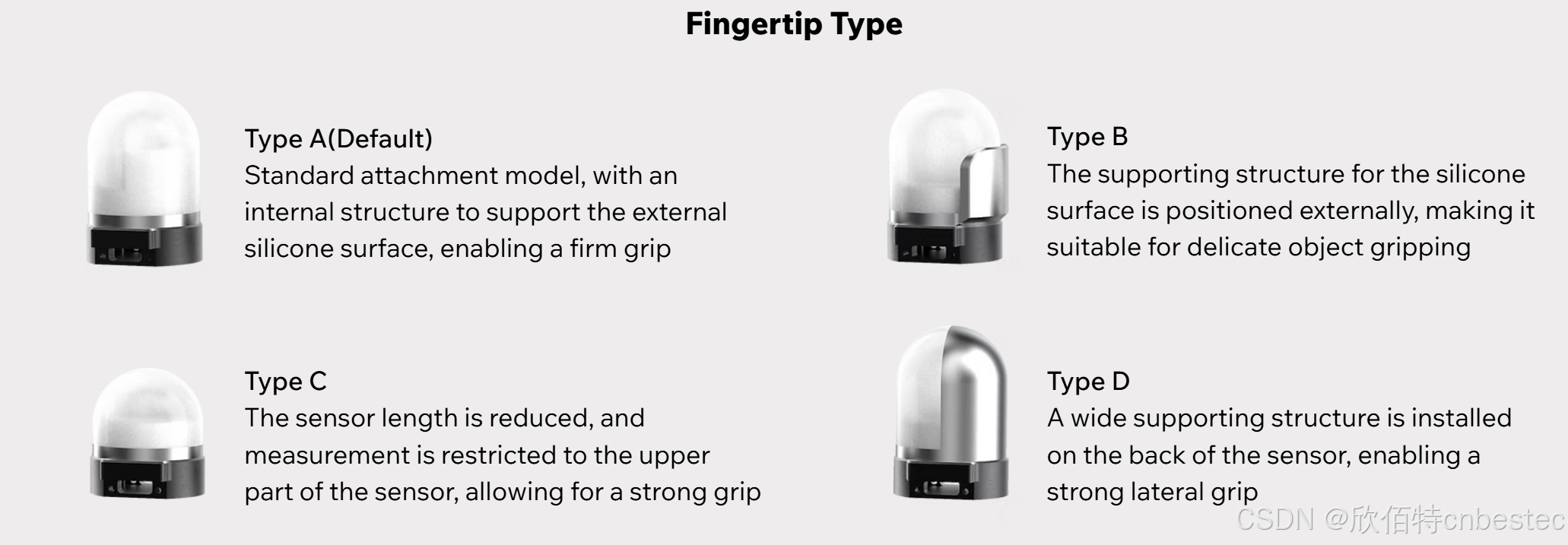
V5(4F Plus)还提供多种指尖类型的选择,包括标准型、强抓握型、精细抓握型和宽支撑型,用户可以根据具体需求选择合适的指尖类型。每种指尖的设计都考虑到了不同的抓取需求,确保在操作时能够提供最佳的抓握效果。
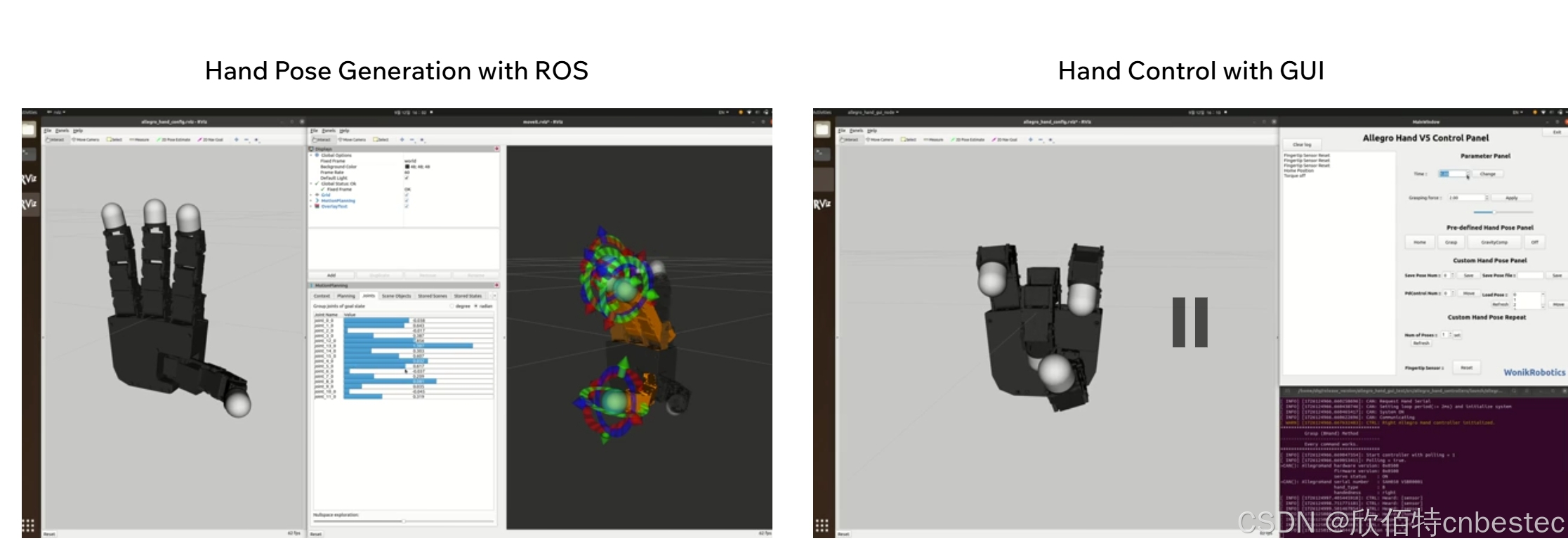
此外,Allegro Hand还配备了可视化应用的综合手部控制系统,支持实时手部状态监控和轻松的手势生成,用户可以通过按钮实现多样化的手部动作控制。该系统还提供简单的软件,便于开发和测试各种商业机器人控制算法。
总之,Allegro Hand V5(4F Plus)是一款功能强大、灵活性高的灵巧手,适合各种研究和工业应用,是实现自动化和智能化操作的理想选择。

Allegrohand四指灵巧手