无人机RTK模块技术要点与难点
RTK运行方式与核心技术
RTK系统通过基准站(Base Station) 和移动站(Rover,即无人机) 的协同工作来实现高精度定位。其核心运行流程与关键技术可以概括如下:
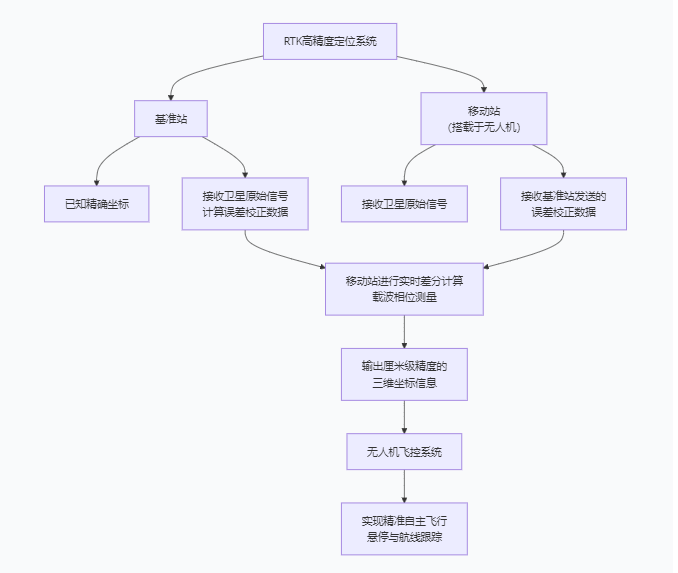
为了实现上述流程并保证其可靠性,RTK模块融合了多项关键技术:

技术难点与挑战
即便有了强大的技术组合,在实际应用中,RTK模块仍会面临一些挑战:
1.信号遮挡与多路径效应:
城区/峡谷作业:高楼林立的环境下,卫星信号容易被遮挡,并且玻璃幕墙等容易反射信号,产生多路径效应,导致定位偏移(可达5-30米)。
林区作业:茂密的树冠会衰减和遮挡信号,虽然多频段信号能一定程度缓解,但在植被极度茂密的地区,仍可能频繁触发IMU辅助模式,对IMU性能提出挑战。
2.强磁场与电磁干扰:
在高压线、变电站附近巡检测绘时,强电磁场会干扰电子罗盘和磁力计的正常工作,可能导致航向计算错误。
解决方案:采用双天线测向技术(如大疆D-RTK方案),通过解算两个GPS天线的矢量来获取精确航向,替代易受干扰的磁力计。
3.环境适应性与可靠性:
电离层活动:剧烈的电离层活动会增加信号误差,影响RTK的收敛速度和精度稳定性,有时可能导致高程误差突增。
气象条件:雨雪天气会增加大气延迟误差(降雨导致误差增加3-5倍),雪层还会吸收2.4GHz信号。
温度影响:极低温度(如-30℃)可能使陶瓷天线效率下降40%。
4.资源约束与优化:
算力平衡:无人机飞控处理器算力有限,需对复杂的卡尔曼滤波算法进行优化,以满足实时性要求(解算延迟需控制在20ms内以避免明显位移)。
功耗约束:GNSS模块全功率运行功耗较高(>200mW),对于长航时或太阳能无人机,需采用间歇定位模式(如从1Hz降至0.1Hz)以节能。
RTK模块的选型与使用建议
1.使用设置注意事项
网络RTK与自建基站:网络RTK(通过4G网卡接收千寻、CORS等服务的差分数据)方便,但依赖网络覆盖。在无网络地区,需自架基站(如D-RTK 2基站),但增加了部署成本和时间。
固件升级:定期检查并升级RTK模块固件,以获取性能提升和支持新功能(如u-blox模块升级固件可增加北斗支持)。
天线放置:天线应架高,确保30度仰角以上无遮挡,并远离无人机上的大功率设备(如图传、数传天线),以减少射频干扰。
2.定位状态监控:飞行时务必关注地面站软件显示的RTK状态:
NONE (无定位) / SINGLE (单点定位):精度米级,不可用于高精度作业。
FLOAT (浮点解):精度分米级,初步收敛,但需谨慎。
FIX (固定解):厘米级精度,方可执行高精度任务。