无人机智能跟踪模块设计与运行分析
一、设计核心要点
1. 多源感知与数据融合
传感器协同配置:集成可见光/红外双光谱摄像头(应对昼夜切换)、激光雷达(LiDAR,测距防撞)、IMU(姿态补偿)、RTK-GNSS(厘米级定位)及声呐(低空定高),通过时空同步技术(时延<1ms)实现异构数据对齐。
多模态融合策略:采用特征级与决策级融合(如SiamFusion框架),利用注意力机制动态加权可见光与红外特征,提升目标在烟雾、弱光下的区分度。
2. 实时目标跟踪与抗干扰
目标表征优化:结合渐进式特征学习(CNN提取局部特征 + ViT融合全局上下文)与运动轨迹预测(LSTM+卡尔曼滤波),解决目标形变、尺度变化问题。
抗遮挡机制:设计“局部跟踪-全局关联”双模块,当目标丢失时触发重检测(如Faster R-CNN全局扫描),并通过图模型交叉关联历史轨迹修复ID切换。
3. 动态路径规划与避障
分层决策架构:高空(>50米)采用蚁群算法规划全局路径;低空(<20米)切换DRL(深度强化学习)算法实时避障,响应延时<10ms。
多目标协同:双无人机采用“状态-角色转换”策略(如180°对称分布),通过分布式博弈算法分配跟踪任务,确保目标持续可见。
4. 嵌入式系统优化
轻量化模型部署:模型剪枝(YOLOv5→TensorRT)与硬件加速(Jetson Orin芯片),满足边缘端100Hz高频推理需求。
低功耗通信协议:如ATKP指令压缩协议,传输延迟<50ms,功耗占比<续航的1.5%。
二、关键技术难点与解决方案
1. 复杂环境适应性挑战
难点:弱光/逆光下光流失效、纹理缺失场景(雪地、水面)定位漂移、电磁干扰导致GNSS失锁。
解决方案:
红外热成像辅助可见光,穿透烟雾/夜间环境。
多源导航冗余(视觉SLAM+惯性导航+星基增强),在GPS拒止时维持定位。
跳频扩频(FHSS)与5G双频通信抗电磁干扰。
2. 实时性与资源平衡
难点:视觉SLAM建图算力需求高,嵌入式平台难以支持;目标检测在高空小像素(仅占图像0.1%)时漏检率高。
解决方案:
特征金字塔网络(FPN)增强小目标检测。
事件触发机制替代周期采样,减少80%数据传输量。
3. 集群协同与安全性
难点:多机通信时延引发轨迹冲突;电池续航限制持续跟踪时间。
解决方案:
区块链智能合约任务拍卖机制公平分配目标。
固态电池提升能量密度,优化电源管理策略延长续航。
三、运行方式与流程
1. 初始化阶段
目标锁定:通过手势框选、YOLO自动检测或ADS-B信号绑定目标,提取多模态特征模板。
云台协同:三轴电机初始化角度,变焦镜头调整视场角(如DJI SmartTrack自动变焦)。
2. 持续跟踪阶段
数据闭环:
1. 感知层:多传感器采集环境与目标数据(可见光/红外图像、LiDAR点云)。
2. 决策层:RL模型生成跟踪指令(如环绕半径、跟随速度),PID控制器解算电机控制量。
3. 执行层:云台动态补偿无人机姿态偏移,飞控调节航向与高度。
动态补偿:光流法计算目标位移,结合气压计定高实现精准跟随(如Parrot“Perfect Side”预设跟拍角度)。
3. 异常处理阶段
目标丢失:置信度低于阈值时,启动全局重检测(Faster R-CNN扫描全帧)并切换至历史轨迹预测。
紧急返航:电量低于阈值或通信中断>6秒,触发分层返航(高空直线路径+低空避障)。
4. 协同任务示例(双无人机)
角色分配:UAV-1负责目标识别,UAV-2承担定位备份,基于观测状态动态切换角色。
打击执行:AI计算最优攻击角度(俯冲投弹/撞击),激光测距锁定核心部件(电池/飞控)。
四、前沿发展趋势
多机协同智能分配:联邦学习训练集群模型,共享网络权重实现零通信编队。
NeRF动态场景建模:构建三维隐式表示,提升视角突变下的跟踪鲁棒性。
可微分物理引擎:嵌入质点动力学模型,支持Zero-shot场景迁移(2小时快速收敛)。
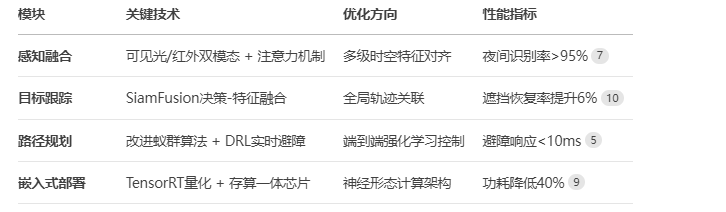
关键设计总结
下表对比了核心模块的技术方案与优化方向: