从感知到执行:人形机器人低延迟视频传输与多模态同步方案解析
引言:当人形机器人接入毫秒级视觉神经元
2024–2025 年,人形机器人正经历一场由“原型验证”向“规模化应用”的关键跨越。无论是特斯拉 Optimus、Figure 02、Unitree H1,还是国内多家新锐厂商的多自由度人形机器人,已经从单纯展示步态和动作,进化到融合全身 30+ 自由度控制、立体视觉与深度感知、多模态 AI 决策的综合智能体。
在这一演进中,机器人的感知与执行不再是孤立环节,而是需要通过低延迟、稳定、可编排的视频链路,与云端计算、远程控制、AI 推理形成闭环。尤其是在工业巡检、应急救援、智慧物流等场景中,延迟哪怕增加 200ms,都可能导致抓取失败、路径规划失效,甚至引发安全风险。
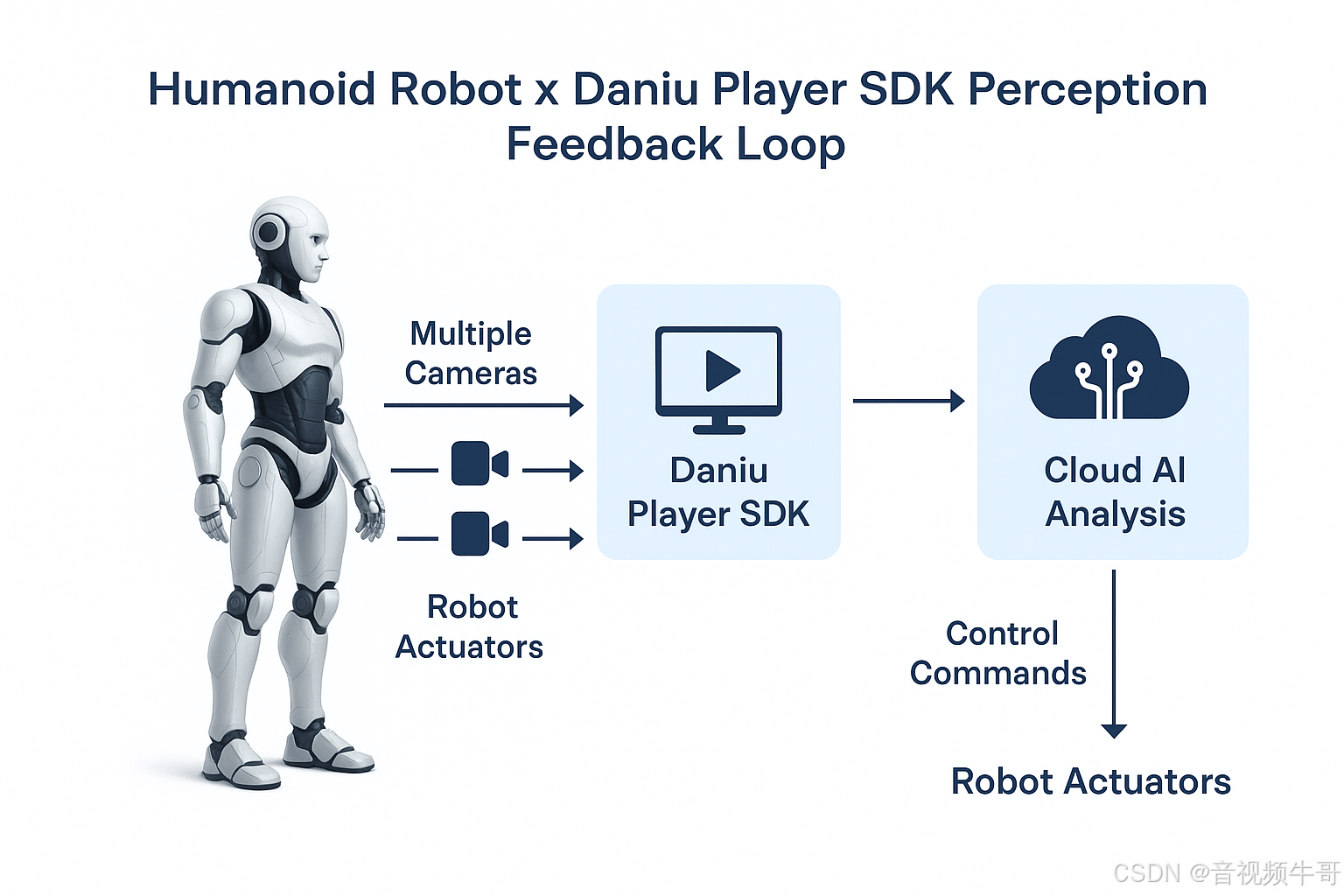
这正是大牛直播SDK与人形机器人结合的切入点——其跨平台、毫秒级延迟、弱网自适应的 RTSP / RTMP / GB28181 实时视频传输能力,能够让机器人接入“毫秒级视觉神经元”:
-
将机器人端多路摄像头(双目、全景、关节端)的视频流稳定传送至控制端或云端 AI 模块;
-
在弱网、抖动、码率变化等恶劣条件下保持画面不断流;
-
支撑感知→分析→决策→执行的全链路闭环控制,让机器人不止会“动”,更会“感知与应变”。
2. 当下人形机器人的优势与局限
在过去两年里,人形机器人经历了从“动作演示”到“任务执行”的跃迁,背后是机械、控制、感知、AI 四大技术体系的协同进化。然而,从工程落地的角度看,它们的技术特性既有令人振奋的突破,也有亟需补齐的短板。
2.1 技术优势
-
类人形态的环境适应性
-
两足步行与类人关节结构,使其可直接使用现有的楼梯、门、工具等人类设计环境,不必像轮式或履带式机器人那样大幅改造场地。
-
对需要“人类替身”执行的任务(如工厂巡检、物料搬运、应急救援)有天然的形态优势。
-
-
多模态感知与融合
-
搭载立体视觉、全景摄像头、深度相机、激光雷达、IMU 等传感器,形成多维度环境认知。
-
融合语音、图像、触觉等输入,可与大规模视觉-语言模型(VLM)结合,实现自然语言驱动的任务指令解析。
-
-
AI 驱动的自适应控制
-
借助深度强化学习、模仿学习和模型预测控制(MPC),实现动作优化、姿态平衡与任务切换。
-
能在非结构化环境中根据实时感知数据动态调整行为策略。
-
-
云-边协同算力模式
-
在边缘端执行基础动作与安全检测,复杂识别、路径规划等高算力任务可交由云端 AI 完成,提升整体性能。
-
2.2 现实局限
-
实时感知延迟瓶颈
-
当多路高清视频(1080p/4K)需要上传至云端处理时,如果链路延迟超过 300ms,就可能导致抓取偏差、避障失败等问题。
-
延迟受限于编码效率、网络抖动、服务器转发性能等多因素。
-
-
弱网与环境适应性不足
-
工厂厂房、地下管廊、灾害现场常伴随信号盲区与干扰,视频链路易卡顿或中断。
-
切换 5G/Wi-Fi/专网时,链路恢复速度和画面完整性仍是挑战。
-
-
能耗与散热限制
-
高功耗视觉计算与视频编码会加重机器人续航压力,限制连续作业时间。
-
部分平台在长时间高负载推流时,会出现热降频影响性能。
-
-
多模态时序对齐复杂
-
视频、音频、IMU、力矩传感器等数据在时间戳对齐与同步传输上存在工程难点,尤其是在跨网络传输的分布式系统中。
-
3. 大牛直播SDK如何赋能人形机器人
在前一部分中,我们看到,人形机器人的应用潜力正在快速释放,但要真正落地到工业、安防、医疗等高价值场景,必须跨越实时感知延迟、弱网稳定性、多模态时序对齐等技术门槛。大牛直播SDK的核心优势,正好与这些痛点形成互补。
Windows平台 RTSP vs RTMP播放器延迟大比拼
安卓轻量级RTSP服务采集摄像头,PC端到安卓拉取RTSP流
3.1 能力映射表
| 人形机器人挑战 | 大牛直播SDK技术能力 | 解决效果 |
|---|---|---|
| 实时感知延迟高 | 毫秒级低延迟传输(RTSP / RTMP / GB28181) | 将视频链路延迟稳定控制在 100–200ms 内,支撑云端控制与AI推理闭环 |
| 弱网易中断 | 自适应码率、断线重连、GOP优化 | 在工厂、隧道、灾害现场等弱网环境下画面不断流 |
| 多路摄像头同步难 | 多路流推送与时间戳同步 | 前视、全景、关节等多源视频统一管理并时序对齐 |
| 算力分配冲突 | 高效硬件编解码(CPU/GPU) | 减轻端侧编码压力,保留更多算力给本地AI推理 |
| 跨平台接入复杂 | 全平台SDK(Linux / Android / Windows / iOS / Unity) | 适配机器人主板与控制端,减少二次开发成本 |
3.2 核心赋能路径
-
多路视频推流与云端AI协作
-
在机器人端,将双目、全景、关节摄像头的视频通过SDK推流到云端。
-
云端AI可实时进行目标检测、姿态估计、环境建模等运算,并下发控制指令。
-
-
跨网络环境下的稳定传输
-
支持5G / Wi-Fi / 专网的动态切换,保证链路快速恢复。
-
对突发丢包和码率抖动进行自适应优化,确保画面与控制信息同步。
-
-
感知与控制的闭环集成
-
视频流 → 云端推理 → 控制指令 → SDK回传 → 机器人执行,实现毫秒级闭环。
-
在远程遥操作和AI辅助自主控制中,延迟与抖动均可控。
-
-
与现有系统的无缝融合
-
GB28181 协议支持,可直接接入已有安防监控与调度系统,实现机器人与摄像头网络的统一调度。
-
4. 典型落地场景组合
4.1 工厂巡检:从“人工点检”到“智能连续巡航”
场景需求
-
高温、噪音、粉尘等不适合长时间人工作业的工业环境
-
大型设备的运行状态需要周期性检查,且位置分散
-
异常需要第一时间定位与上报
技术链路
-
机器人端
-
配备前视双目与红外热成像摄像头
-
大牛直播SDK推流模块将视频实时编码并发往云端巡检平台
-
-
云端AI
-
视频流经云端AI进行热异常检测、设备状态OCR识别
-
异常事件触发即时告警
-
-
控制端
-
告警信息通过SDK回传至机器人,触发二次检查动作
-
可远程手动接管,实现精确复核
-
价值实现
-
巡检效率提升 3–5 倍
-
异常响应时间缩短至秒级
-
巡检全程可溯源(视频存档 + AI 分析日志)
4.2 应急救援:第一视角感知的“生命通道”
场景需求
-
火灾、地震、化工泄漏等高危环境需要快速搜救
-
需要第一手现场视频与传感器数据
-
人类救援人员无法立即进入或长时间停留
技术链路
-
机器人端
-
搭载可见光与热成像双路摄像机,环境气体传感器
-
SDK 将视频和传感数据低延迟推流至指挥中心
-
-
指挥中心
-
多通道视频实时拼接,云端AI执行烟雾识别、人体检测
-
根据环境数据实时调整救援路径
-
-
闭环控制
-
指挥中心下发路径优化或机械臂操作指令
-
SDK保证指令与视频链路的时序同步,避免延迟导致的误操作
-
价值实现
-
实现救援任务中“秒级决策”
-
提升恶劣环境下机器人操作的安全性与精准度
-
多路数据融合辅助整体指挥
4.3 医疗辅助:跨空间的实时康复与诊疗协作
场景需求
-
隔离病区或远程康复中心需要跨地域医疗支持
-
医生需要看到患者的实时动作状态并进行纠正
-
高精度康复训练器具需要与机器人协作
技术链路
-
机器人端
-
安装高清摄像头、深度摄像头捕捉病患动作
-
SDK 推流至医生端,实现毫秒级实时画面
-
-
医生端 / 云端AI
-
云端AI进行动作姿态分析,并与康复计划进行比对
-
医生在视频流上直接标注指导
-
-
执行闭环
-
指令回传至机器人执行单元(如机械臂、步态辅助器)
-
即时反馈纠正病患动作
-
价值实现
-
提供无延迟的远程康复指导
-
提升隔离环境下的医疗效率
-
数据可长期留存,用于疗效跟踪与AI再训练
5. 落地实施的关键技术要点
人形机器人与大牛直播SDK的结合,如果要真正实现“即插即用”的毫秒级感知闭环,不仅要依赖协议和接口层面的对接,还必须在网络架构、延迟控制、弱网优化、多模态数据同步等方面完成全链路工程优化。
5.1 网络架构设计
目标:保证端到端链路的稳定性与可扩展性
-
端侧推流节点
-
在机器人主控板(Linux/Android)直接运行 SDK 推流服务,减少中转节点
-
使用硬件编码减轻CPU负担
-
-
边缘/云中转节点
-
边缘节点(MEC)部署 SDK 转发或协议转换(RTSP ↔ RTMP ↔ GB28181),缩短传输距离
-
云端节点可同时向多终端分发,并对接 AI 推理服务
-
-
控制回路
-
建立视频下行(机器人→控制端)与指令上行(控制端→机器人)的双向独立通道
-
确保指令通道优先级高于视频通道,避免拥塞导致的动作延迟
-
5.2 延迟控制策略
目标:将端到端延迟稳定控制在 100–200ms
-
编码优化
-
使用低延迟模式,GOP 长度控制在 1-2秒之间
-
-
传输优化
-
采用 UDP 优先传输(RTSP/RTP over UDP)
-
在网络抖动较大时开启自适应抖动缓冲区,缓冲时间 < 50ms
-
5.3 多模态数据同步
目标:确保视频、音频、IMU、力矩传感器等数据在毫秒级内对齐
-
同步传输机制
-
在多路推流时使用多轨同步(multi-track sync)或扩展SEI投递数据,保证不同模态间的帧对齐
-
在控制端播放或AI推理时根据时间戳进行回放/分析
-
-
数据融合层
-
在云端或边缘节点构建数据融合模块,将多模态数据打包成统一结构体,供上层AI与控制逻辑直接调用
-
6. 结语与未来展望
人形机器人的价值,并不止于“形似人类”,而在于它能在复杂、动态、多风险的环境中,像人一样去感知、理解、决策、执行——甚至比人更快、更稳、更安全。要让这一能力真正落地,必须依托一条稳定、低延迟、可编排的视频与数据链路,将机器人端的多模态感知与云端/远端的智能决策实时连接起来。
大牛直播SDK在这一链路中扮演着“视觉神经元传导系统”的角色:
-
在毫秒级延迟下,将机器人捕获的第一视角画面、多源传感数据稳定送达AI推理与控制端;
-
在弱网与动态网络环境中,保持画面与指令的同步性与连续性;
-
在跨平台环境下,实现从机器人端(Linux/Android)到控制端(Windows/iOS/Unity)的无缝互通。
从行业趋势看,这种“实时感知 × 云端智能 × 动作执行”的闭环将成为未来人形机器人普及的标配架构:
-
多模态AI原生化
-
视频、音频、IMU、力矩、环境传感数据统一接入AI推理链路,摆脱单一视觉依赖。
-
-
边缘-云协同演进
-
边缘节点完成基础推理与安全防护,云端进行高精度计算与多任务调度。
-
-
更低延迟的传输技术
-
在现有RTSP/RTMP/GB28181之外,将延迟稳定至 100–200ms 级别,满足远程精细操控需求。
-
-
开放式生态对接
-
SDK能力模块化,使其可与工业MES、安防VMS、医疗HIS等系统直接互通,形成跨领域的智能协作网络。
-
未来,当人形机器人能够像人一样感知环境,并依托大牛直播SDK这样稳定高效的链路与云端AI进行“秒级思考”,它们将不再只是机械替代,而是全行业智能化升级的加速器。从工厂到医院,从救援到家庭,人形机器人将与实时视频技术一道,构建一个可感知、可理解、可协作的新型智能社会。
📎 CSDN官方博客:音视频牛哥-CSDN博客