STM32HAL 快速入门(六):GPIO 输入之按键控制 LED
STM32HAL 快速入门(六):GPIO 输入之按键控制 LED
前言
大家好,这里是 Hello_Embed。GPIO 不仅能输出电平控制外设,还能通过输入模式读取外部信号 —— 本篇先从 “按键控制 LED” 开始,学习 GPIO 输入的基础用法,下一篇将进阶到 “光敏传感器控制蜂鸣器”,逐步掌握不同输入场景的处理。
一、调试器连接问题解决
在调试时,可能会遇到 STM32 与调试器无法连接的情况,报错如下:
可在 CubeMX 中修改配置解决:进入 “Pinout & Configuration”→“System Core”→“SYS”,将 “Debug” 选项从 “No Debug” 改为 “Serial Wire”,具体步骤如图:
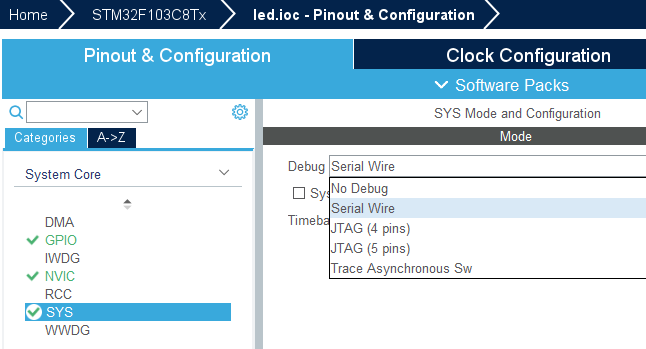
具体原理此处不展开,读者可自行探究,我们回到 GPIO 输入的实战。
二、按键控制 LED 的实现
GPIO 输入模式的核心是 “读取外部信号电平”,以按键为例,我们需要通过引脚读取按键的按下 / 松开状态,再控制 LED 的亮灭。
1. 机械按键的特性与消抖需求
按键是机械开关,按下时触点会短暂弹跳,导致电平在高低之间快速波动(即 “抖动”),直接读取会产生误判。因此,需要通过 “消抖” 处理(如延时)确保信号稳定。
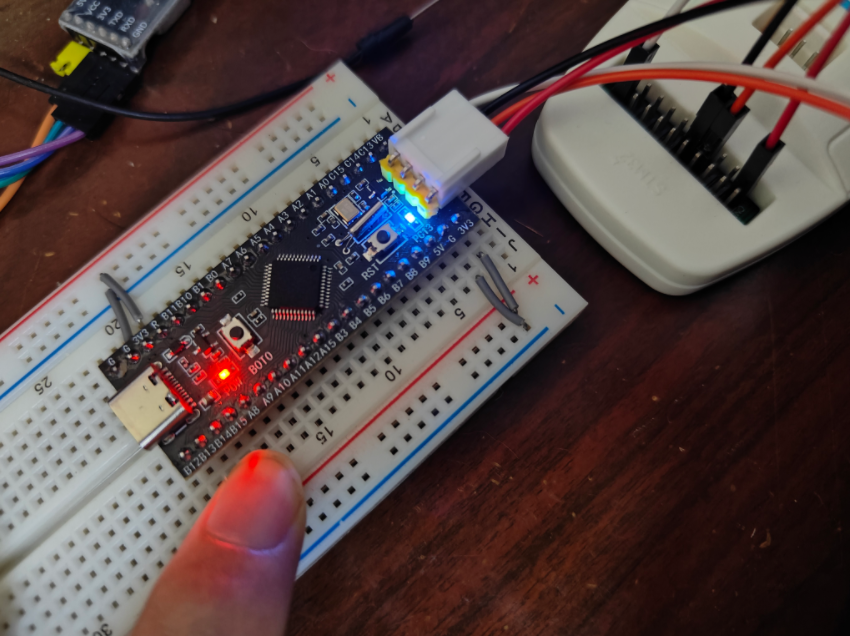
2. 硬件电路搭建
在面包板上搭建电路,连接按键与 STM32:
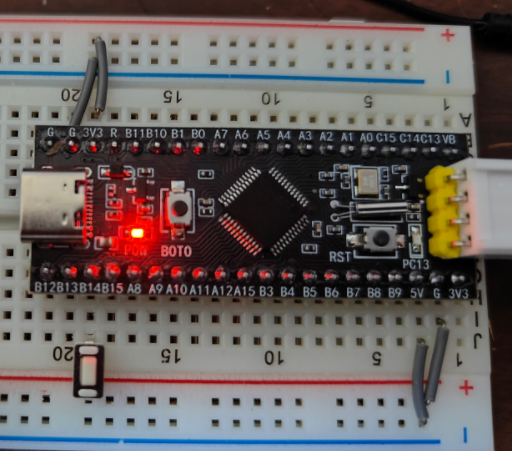
- 面包板上下端通过电阻接入 VCC 和 GND,提供电源;
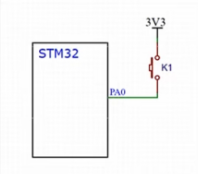
- 按键一端连接 PB14 引脚,另一端连接 VCC,原理图如下:
3. CubeMX 配置 PB14 为输入模式
按键未按下时,PB14 引脚悬空(电平不确定),需配置为下拉输入(启用内部下拉电阻):
- 未按下时,下拉电阻将 PB14 拉至低电平(0V);
- 按下时,VCC 通过按键将 PB14 拉高(3.3V),状态明确。
配置步骤:在 CubeMX 中选择 PB14,设置为 “GPIO_Input”,并选择 “Pull-down”(下拉):
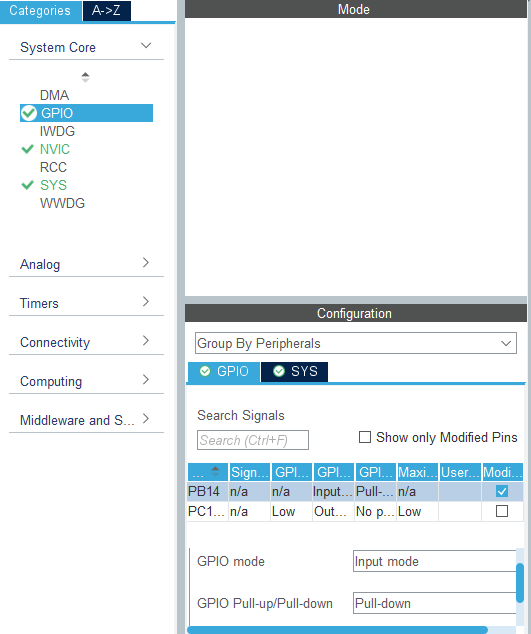
同时确保 PC13 已按之前的配置设为推挽输出(控制 LED),生成工程。
4. 代码实现:读取按键状态控制 LED
通过HAL_GPIO_ReadPin函数读取 PB14 的电平状态,再用HAL_GPIO_WritePin控制 PC13(LED)。
(1)基础代码(带消抖)
while (1)
{/* USER CODE END WHILE *//* USER CODE BEGIN 3 */GPIO_PinState state; // 存储按键状态state = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_14); // 读取PB14电平HAL_Delay(20); // 延时20ms消抖,过滤机械抖动if (state == GPIO_PIN_SET) // 按键按下(高电平),LED点亮(低电平)HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);else // 按键松开(低电平),LED熄灭(高电平)HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET);/* USER CODE END 3 */
}
HAL_GPIO_ReadPin函数的功能如图(返回引脚的高低电平):
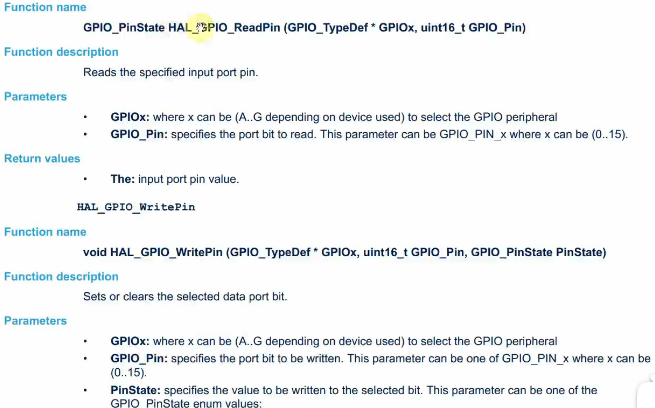
返回值类型GPIO_PinState是枚举类型,仅包含GPIO_PIN_RESET(0)和GPIO_PIN_SET(1):
typedef enum
{GPIO_PIN_RESET = 0u,GPIO_PIN_SET
} GPIO_PinState;
加入HAL_Delay(20)后,可稳定读取按键状态,LED 能正常响应按键操作:
(2)简化代码(反向控制)
一行代码可实现相反效果(按键按下 LED 灭,松开 LED 亮):
while (1)
{/* USER CODE END WHILE *//* USER CODE BEGIN 3 */// 直接将PB14的状态作为PC13的输出值HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_14));/* USER CODE END 3 */
}
- 效果相反的原因:LED 是 “低电平点亮”,而按键按下时 PB14 为高电平,直接传递状态会导致 LED 在按键按下时熄灭;
- 不能用
~取反的原因:HAL_GPIO_ReadPin返回的是枚举类型,而非整数,取反操作不适用。
结尾
本文通过 “按键控制 LED” 掌握了 GPIO 输入模式的基础用法:配置下拉输入、用HAL_GPIO_ReadPin读取电平、通过延时消抖处理机械抖动。这些是处理数字输入信号的核心技巧。
下一篇笔记,我们将进一步探索 GPIO 输入的应用 —— 用光敏电阻(模拟信号)控制蜂鸣器,学习如何处理连续变化的输入信号。Hello_Embed 继续带你深入 GPIO 的实用场景,敬请期待~