吴恩达【prompt提示词工程】学习笔记
两种类型llm
- base llm预测下一个此
- instruction tuned llm 根据指令回答
在大量文本上训练的基本LLM,接着用输入和输出的指令微调它,更好地遵循这些指令
RLHF:用人类反馈强化学习
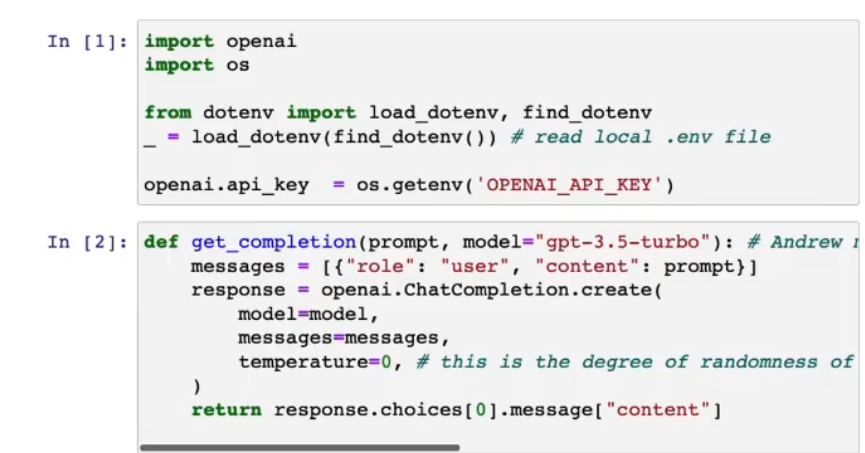
pip install openaiimport openaiopenai.api_key = "sk-" #设置openapi的密钥,openai网站得到api密钥原则
1. principle 1:write clear and specific instruction.
- use delimiters:''', <>;
- ask for structured output:json, html规定格式,输出的内容python可读可用;
- check the conditions are satisfied,检查条件或假设是否满足
- few-shot prompting, 少量的示例是模型遵循
2. principle 2: give the model time to think
- specify the steps to complete a task
- instruct the model to work out its own solution before rushing to a conclusion模型在给出答案之前先给出自己的分析
3. Limitations
幻觉hallucination。找到相关的引用,并基于引用回答问题
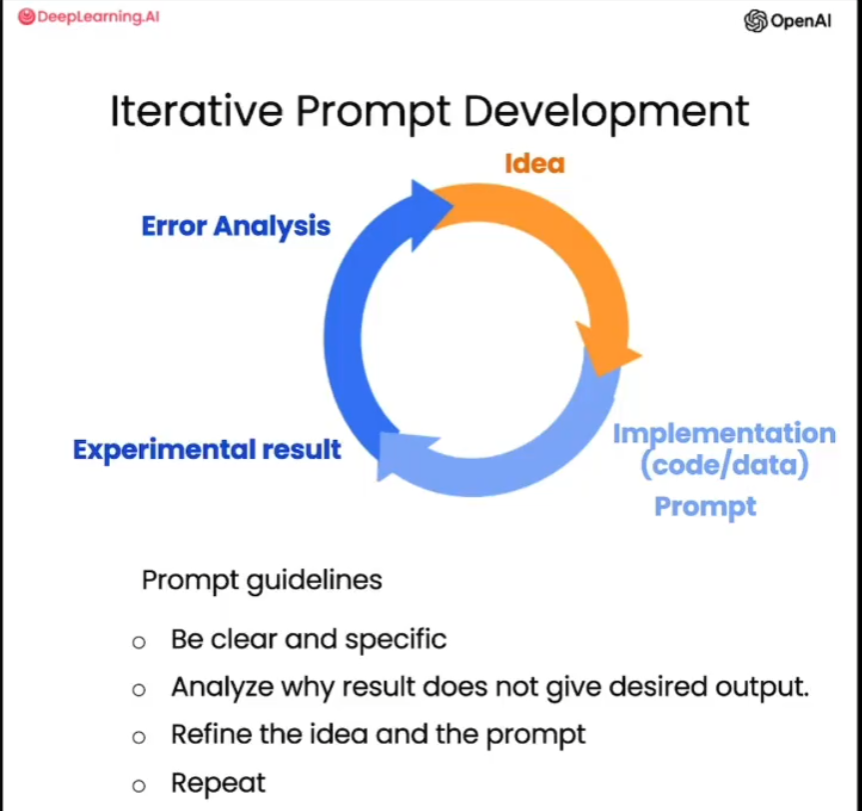
迭代
根据需求不断完善
摘要
summrize
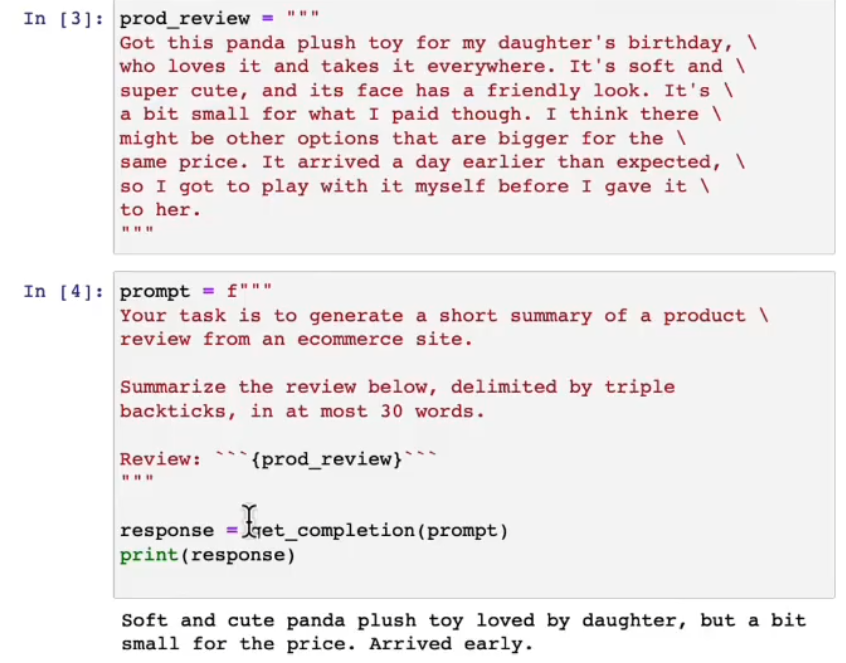 prompt为特定对象,具体特定长度(数量在可接受范围)
prompt为特定对象,具体特定长度(数量在可接受范围)
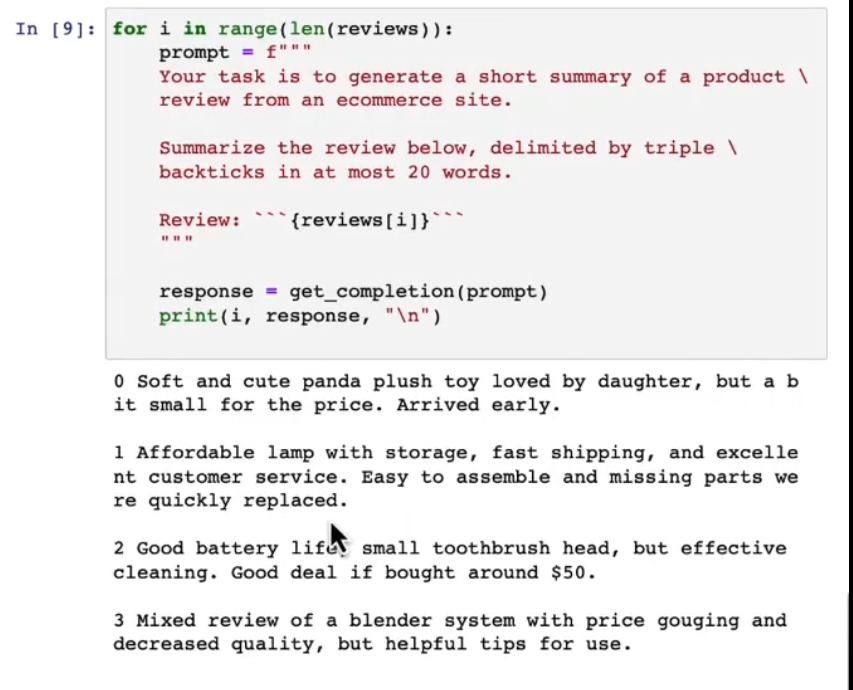
构建循环处理多个内容
推理
收集标签,对不同的任务训练不同的模型。但对llm,可以用一个模型,通过提示完成不同的任务