【嵌入式电机控制#18】有刷直流串级控制
一、串级控制
在控制理论中,串级控制是改善控制性能的一大有效方法。
所谓串级控制,就是采用多个控制器串联工作,外控制器输出作为内环的输入,而内环控制器输出去控制执行器,从而提升控制效果。
这种设计方法极大提升了控制系统的抗干扰能力。
对于电机控制系统而言,速度+电流的闭环控制,增加了对电流本身的控制,不至于在特殊时刻超调。同时,两个控制器协同工作,提高了响应时间。
二、引入电流闭环后的问题
1.电流截至控制
2. 积分限幅
不详细展开讲了,这些前面都涉及到
三、双闭环
内环:对时间要求高,实时响应需求高,采样频率高
外环:对时间要求较低,采样频率较低。
为什么电流需要放到内环?
第二次工业革命时期,人类主要采用的是单电压控制。后来由于工业、军事领域对控制电路负载调制率和响应速度的不断提高,电压环显得不再可靠。
为什么电压不可靠?大家是否还记得第一次学自动控制原理时的一道例题,
某LC系统如下:
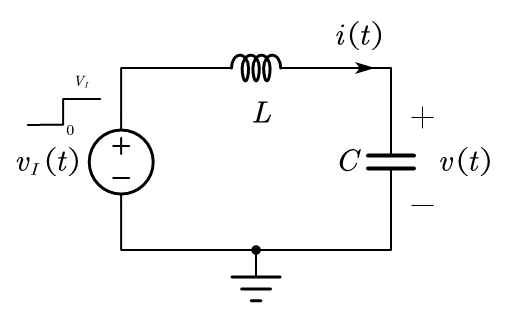
电源电压为,
电容电流、电感电压在单位阶跃信号输入下的零状态响应,
则推导出电容两端电压为,
![]()
其中,
两边做拉氏变换并化简得,
由于是单位阶跃信号,则输入与输出之间的传递函数为,
它很明显是个二阶系统
电压是一个经过电感电容(近似二阶系统)后的表现值,系统滞后性很大,环路控制较慢。
然而电流,却是直接经过一阶环节形成的,对系统变化的敏感度较高。
根据控制量的物理形成规律,我们设计出了电压(转速)外环,电流内环的控制方法。
当然,也有些情况下会出现电流外环,电压内环的系统,这里不做过多讲解。
四、重要控制框架介绍
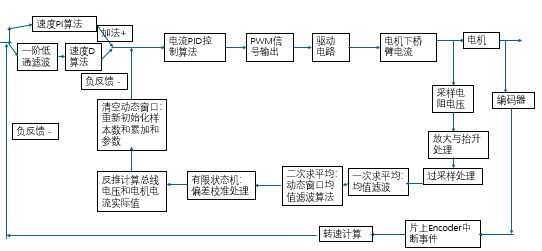
接下来介绍位置速度电流三闭环系统的控制框架,
PID_TypeDef cPID,sPID,lPID;
void HAL_SYSTICK_Callback(void)
{__IO int32_t ADC_Resul= 0;__IO float Volt_Result = 0;__IO float ADC_CurrentValue; // ADC结果,电压结果,adc电流值初始化if(uwTick % 100 == 0){ //距离环中断//计算计数器绝对计数值Sample_Pulse = (OverflowCount*CNT_MAX) + (int32_t)__HAL_TIM_GET_COUNTER(&htimx_Encoder);//进行距离PIDif(Start_flag == 1){//获得了速度占空比tmpPWM_DutySpd = LocPIDCalc(Sample_Pulse);//速度占空比不能超过设定最大值if(tmpPWM_DutySpd >= TARGET_SPEED)tmpPWM_DutySpd = TARGET_SPEED;if(tmpPWM_DutySpd <= -TARGET_SPEED)tmpPWM_DutySpd = -TARGET_SPEED;}}if(uwTick % 100 == 0){//速度环中断//这里不能用获取counter再清零的方式算转速,因为我们还要算绝对位置//所以用两次绝对量做差算速度Sample_Pulse = (OverflowCount*CNT_MAX) + (int32_t)__HAL_TIM_GET_COUNTER(&htimx_Encoder);Spd_PPS = Sample_Pulse - LastSample_Pulse;LastSample_Pulse = Sample_Pulse ;//计算实际转速 脉冲总数/PPR/减速比/倍频系数 * 频率 * 单位换算Spd_RPM = ((((float)Spd_PPS/(float)PPR)*10.0f)*(float)60);//µ¥Î»ÊÇrpm//进行速度PID计算if(Start_flag == 1){sPID.SetPoint = tmpPWM_DutySpd;tmpPWM_Duty = SpdPIDCalc(Spd_RPM);if(tmpPWM_Duty < 0){Motor_Dir = CW;BDDCMOTOR_DIR_CW();tmpPWM_Duty = -tmpPWM_Duty;}else{Motor_Dir = CCW;BDDCMOTOR_DIR_CCW();}//电流占空比只能是正数,在依据占空比正负进行方向控制的同时,取绝对值//进行电流限幅if(tmpPWM_Duty >= TARGET_CURRENT)tmpPWM_Duty = TARGET_CURRENT;}}if(uwTick % 40 == 0){ADC_Resul = AverSum/AverCnt ;//这个前面说过了OffsetCnt_Flag++;if(OffsetCnt_Flag >= 16){if(OffsetCnt_Flag == 16){OffSetHex /= OffsetCnt_Flag-1;}OffsetCnt_Flag = 32;ADC_Resul -= OffSetHex;}else OffSetHex += ADC_Resul;Volt_Result = ( (float)( (float)(ADC_Resul) * VOLT_RESOLUTION) );ADC_CurrentValue = (float)( (Volt_Result / GAIN) / SAMPLING_RES);if(Volt_Result<0)Volt_Result = 0;AverCnt = 0;AverSum = 0;//最后的区别就在于我们电流PID输入量以速度环输出为准if(Start_flag == 1){ cPID.SetPoint = tmpPWM_Duty ;PWM_Duty = CurPIDCalc( (int32_t)ADC_CurrentValue);if(PWM_Duty >= BDCMOTOR_DUTY_FULL)PWM_Duty = BDCMOTOR_DUTY_FULL;if(PWM_Duty <=0)PWM_Duty = 0;__HAL_TIM_SET_COMPARE(&htimx_BDCMOTOR,TIM_CHANNEL_1,PWM_Duty);}printf("LOC:%d Sped: %2.2f r/m Curr: %d mA \n",Sample_Pulse,Spd_RPM ,(int32_t)ADC_CurrentValue);}
}需要注意的是,它这里采用了占空比直接等价换算为速度的计算方式,在实际工程中大家可能需要进行合理的换算(下一小段开始简单讲述这个问题)。
因为此章节结束后,一定会有些同学已经开始上手做项目,我将在这里梳理一遍控制系统的设计顺序,避免让大家犯错。
五、控制系统设计的前期准备
设计一个控制系统,我们首先要搞清楚控制量是什么。在速度控制中,我们就是采取速度输入为控制量。
其次,我们需要确定控制对象,在速度环中我们采用电机转速为控制对象。
然后,分析执行器在开环工作下输入与控制对象的关系,这个过程称为开环建模
开环建模不可能建立完全准确的模型,这也就让PID算法应运而生。但是,较为准确的开环建模可以与闭环构成 前馈-反馈复合控制系统,利用系统输入与输出之间较为准确的关系,快速将输出给到目标值附近,减轻了闭环系统的负担。
对于常见的直流有刷电机,我们可以默认电机两端电压和转速是近似线性的。这意味着我们可以把占空比平均的分配到转速刻度上,换句话说我们的PWM定时器ARR可以是转速的常数倍。规则设定后,每次进行PID转PWM输出前必须进行换算。
对于无刷、永磁等结构复杂的电机,内部硬件结构变化多端,品类区分繁杂,所以在进行闭环系统设计前我们必须进行一次较为严谨的开环建模,以提升控制性能。
六、总结
本专栏前半部分内容全部完结,此部分主要讲述在直流有刷背景下的经典控制算法的电机应用,是后续六步控制、FOC、弱磁等更高级控制算法的基础。
在后续内容中,我们将揭开PID黑盒模型的外衣,利用电机中相位、磁通等更近实质的物理量,实现性能更强的控制