电子电路设计学习


PCB布局要求
通用要求
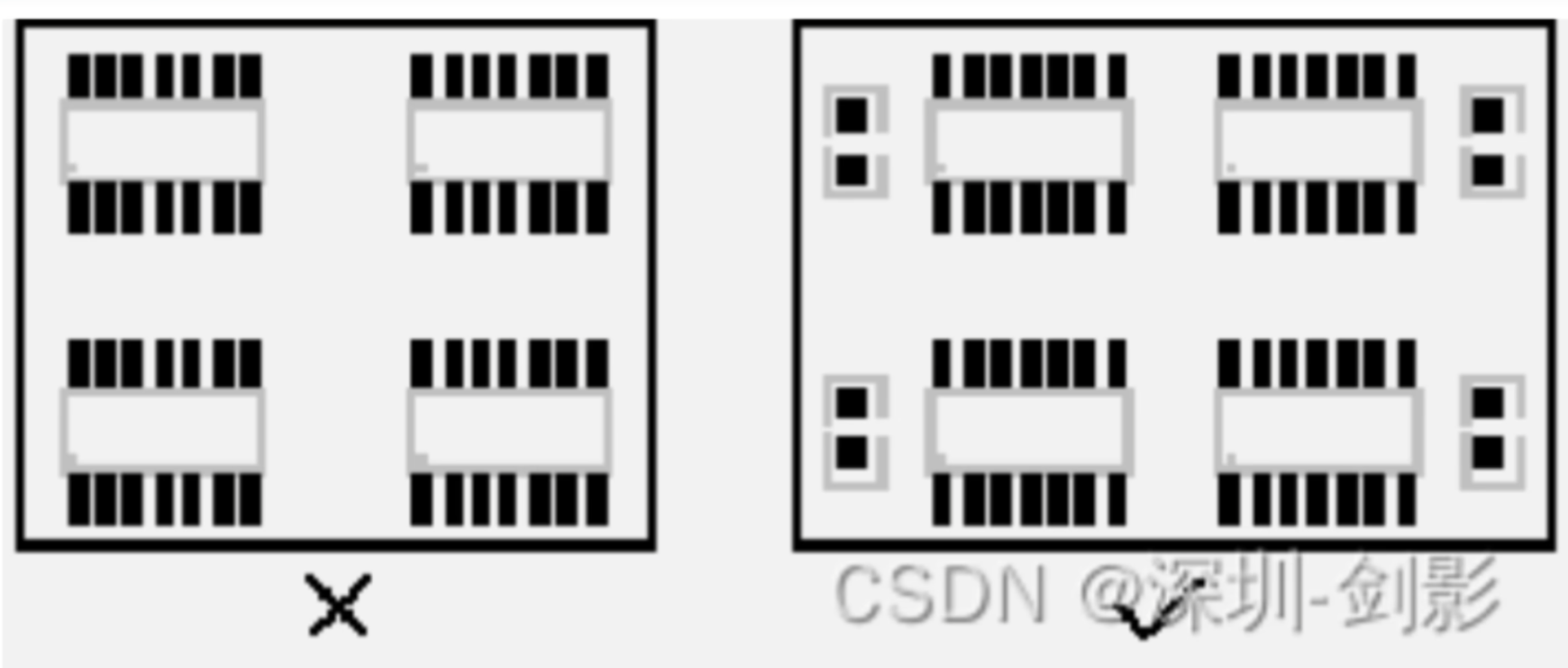
合理安排布局,元器件之间应相互平行或者垂直排列,以求整齐、美观;元件排
列紧凑,在整个版面上应分布均匀、疏密一致,所有元器件均放置在顶层。
1.必须根据元器件的电气特性和使用特点来布局(这点非常重要),举例如下:对于各种接口、按键和排针,需要放在板子边缘,方便插接,对于屏幕和主控芯片等,一般放在板子
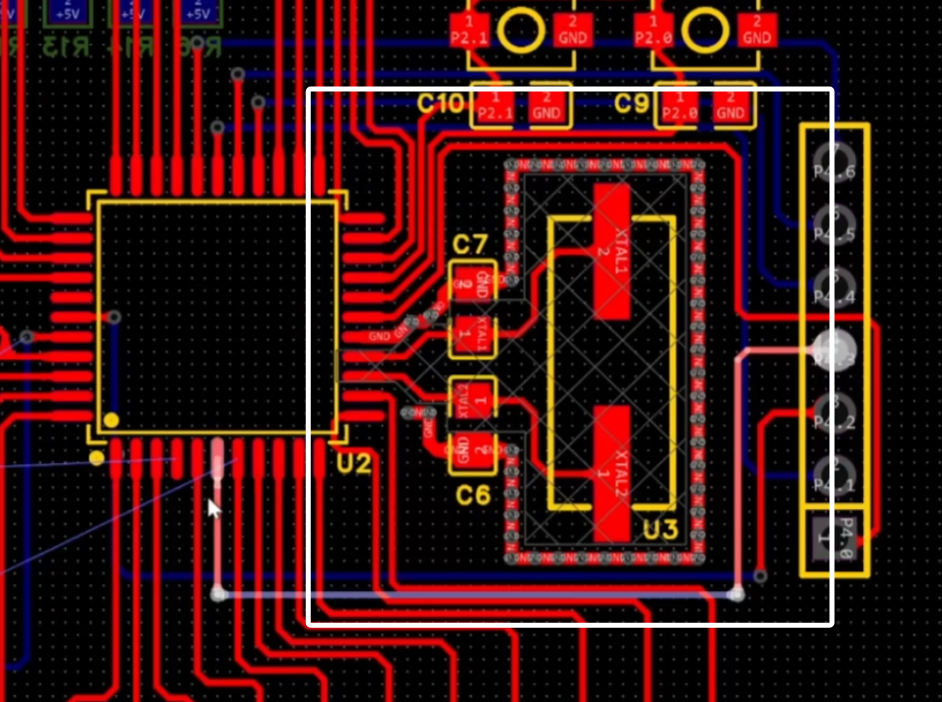
中央,对于电源电路,一般放在板子的电源输入旁边并且要注意电流路径和滤波电容位置(非常重要),对于晶振需要靠近单片机晶振引脚摆放等2.不要把元器件看成二维物体,而是应该看成三维物体,有时空间有干涉的情况需要考虑
3.元件的布局应该采用模块化,也就是同一个模块电路的元件应该放同一个区域,按照就近原则来布局,不能东一个西一个。
1.顶层优先原则:尽量在顶层布线
2.电源线原则上要加粗:因为电源线是要给电路板各个模块供电的,电源线加粗有利于电流在主干道上流通;在日常PCB设计中,在25度时,对于铜厚为10z(盎司)的导线,10mil线宽能够承载0.65A电流,40mil线宽能够承载2.3A电流。
3.同一层内走线大于90度:同一层走线禁止90度或者走锐角,从原理上讲,锐角直角走线会造成走线阻抗不连续,对于信号的传输有影响,推荐走线135度。
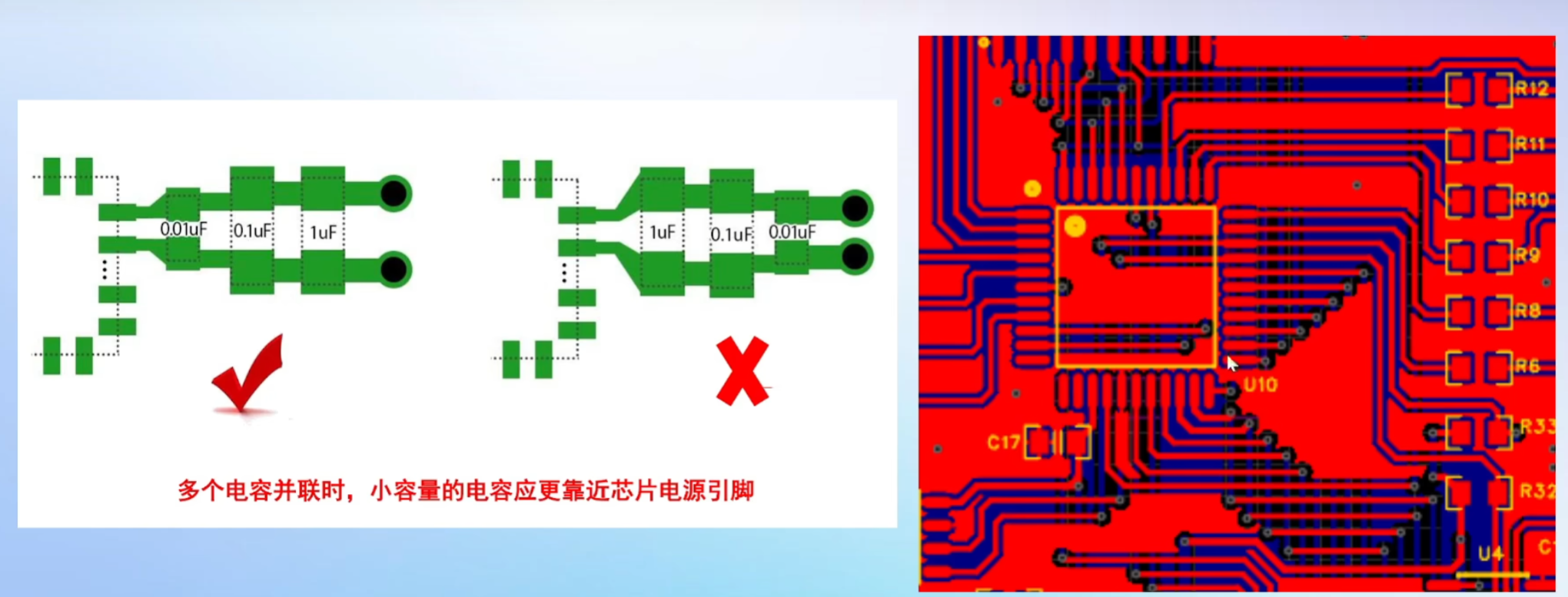
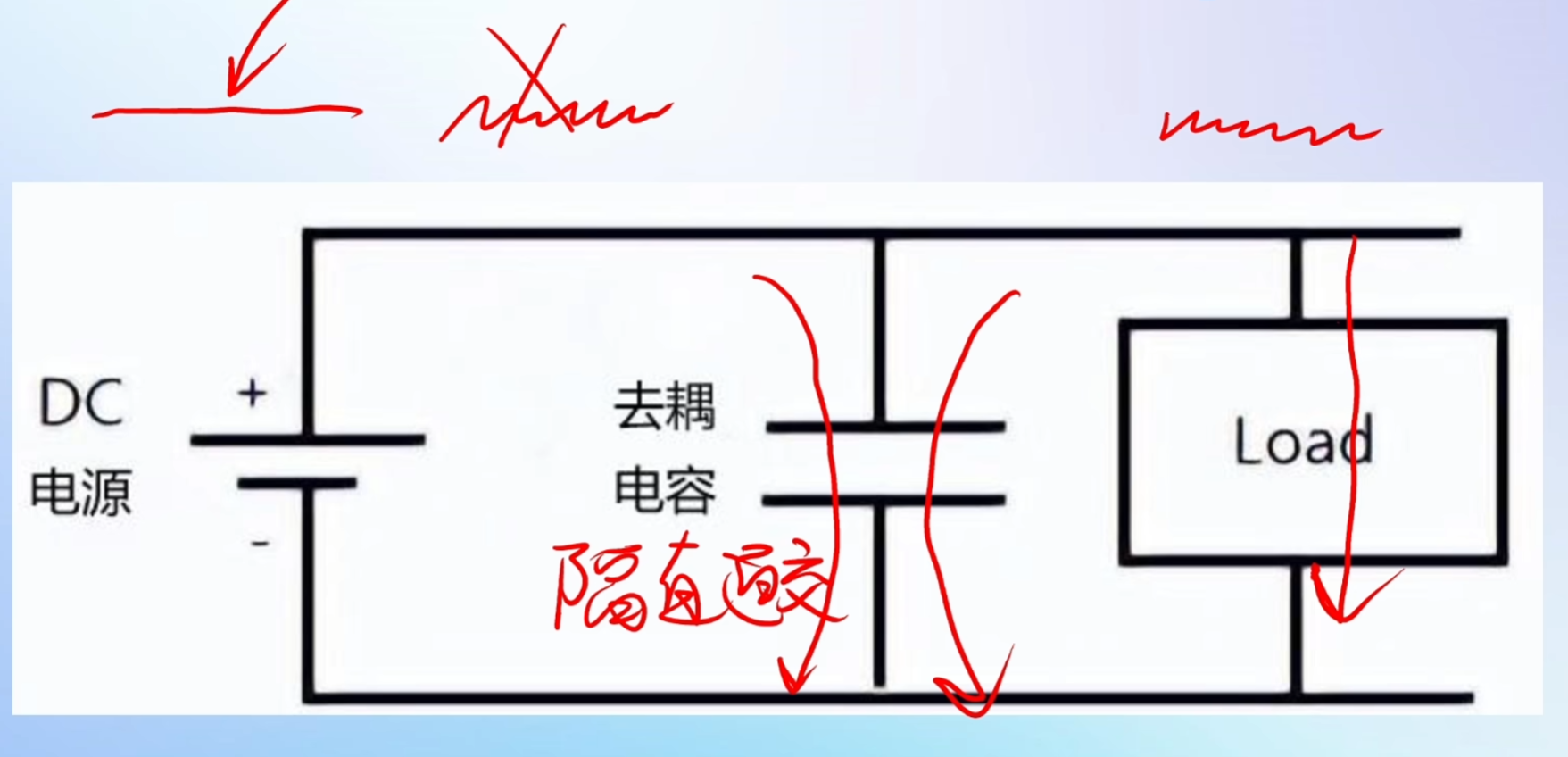
4.注意电流路径和电容的摆放位置:电源要先经过电容滤波再给后级,去耦电容要贴近芯片引脚放置,并就近接地。
关键元件优先、关键信号线优先、密度优先
(1)密度优先原则:从单板上连线最密集的区域开始布线。
(2)优先关键元器件:如DDR、射频等核心部分应优先布线,类似信号传输线应提供专层、电源、地回路。其他次要信号要顾全整体,不可以和关键信号相抵触。
(3)关键信号线优先:电源、模拟小信号、高速信号、时钟信号和同步信号等关键信号优先布线。
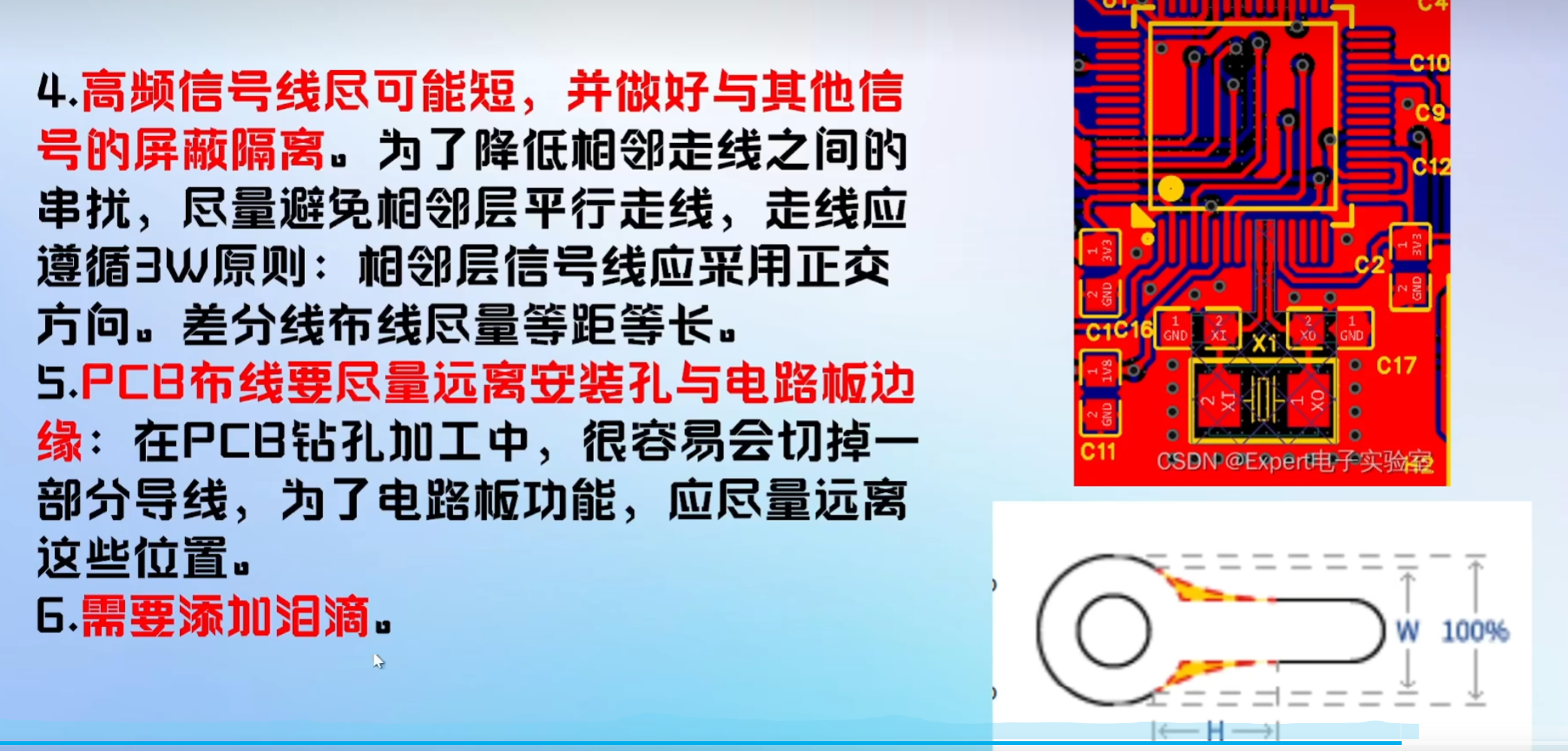
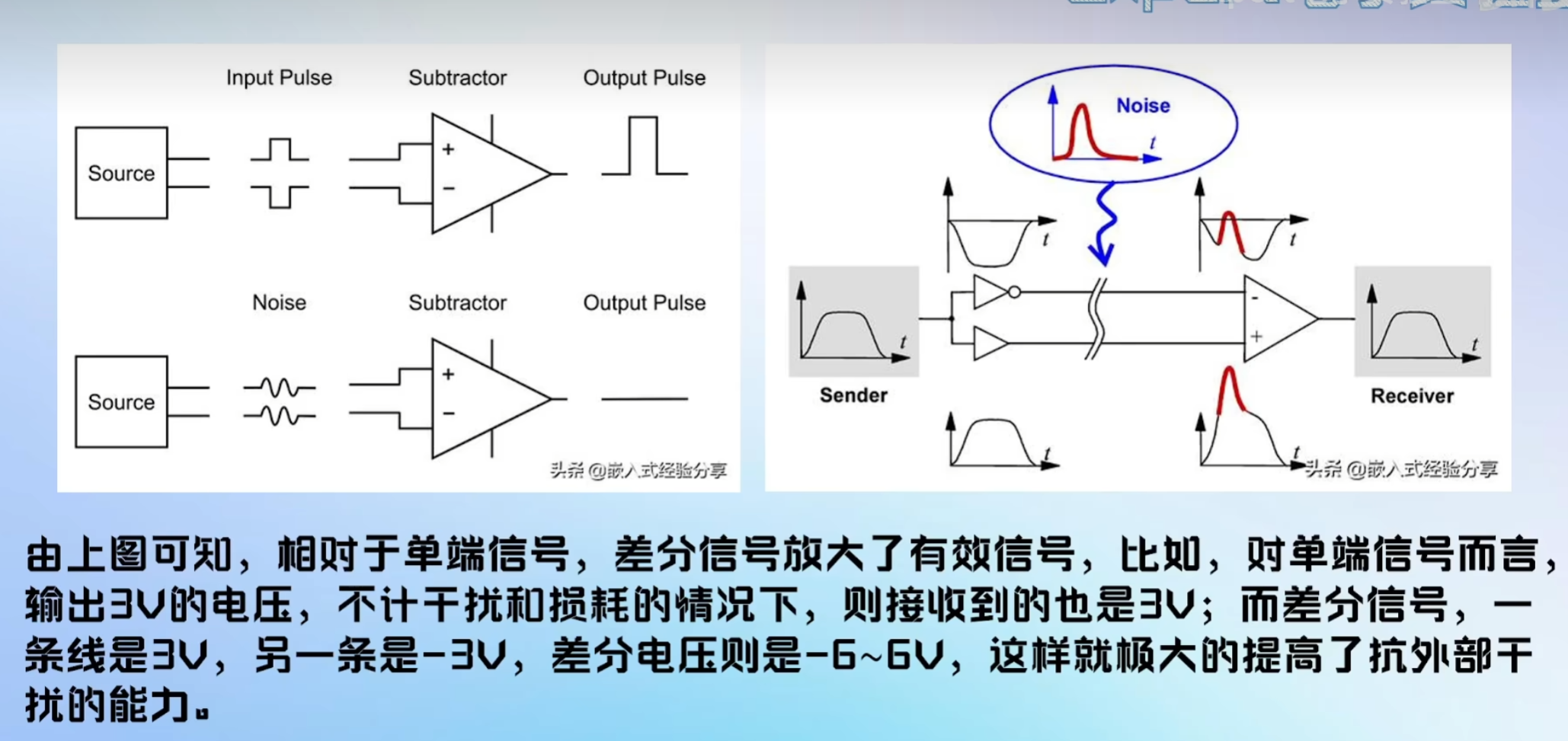
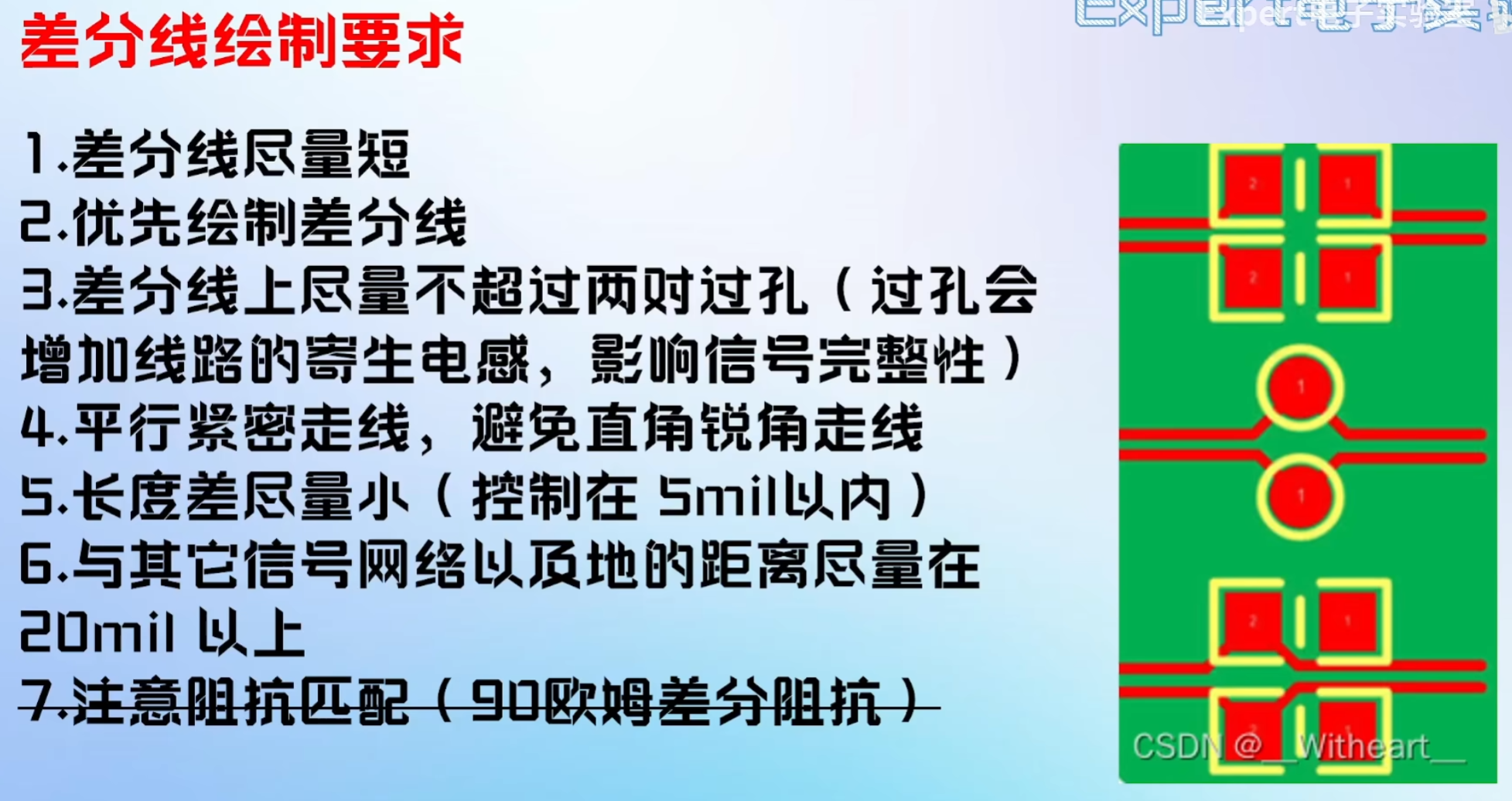
差分电路很重要!晶振屏蔽也需要注意!
布局为布线让路!
在信号线周围铺上一层铜皮的话可以更好的保护信号的完整性
7.26学习日记



大师篇学习
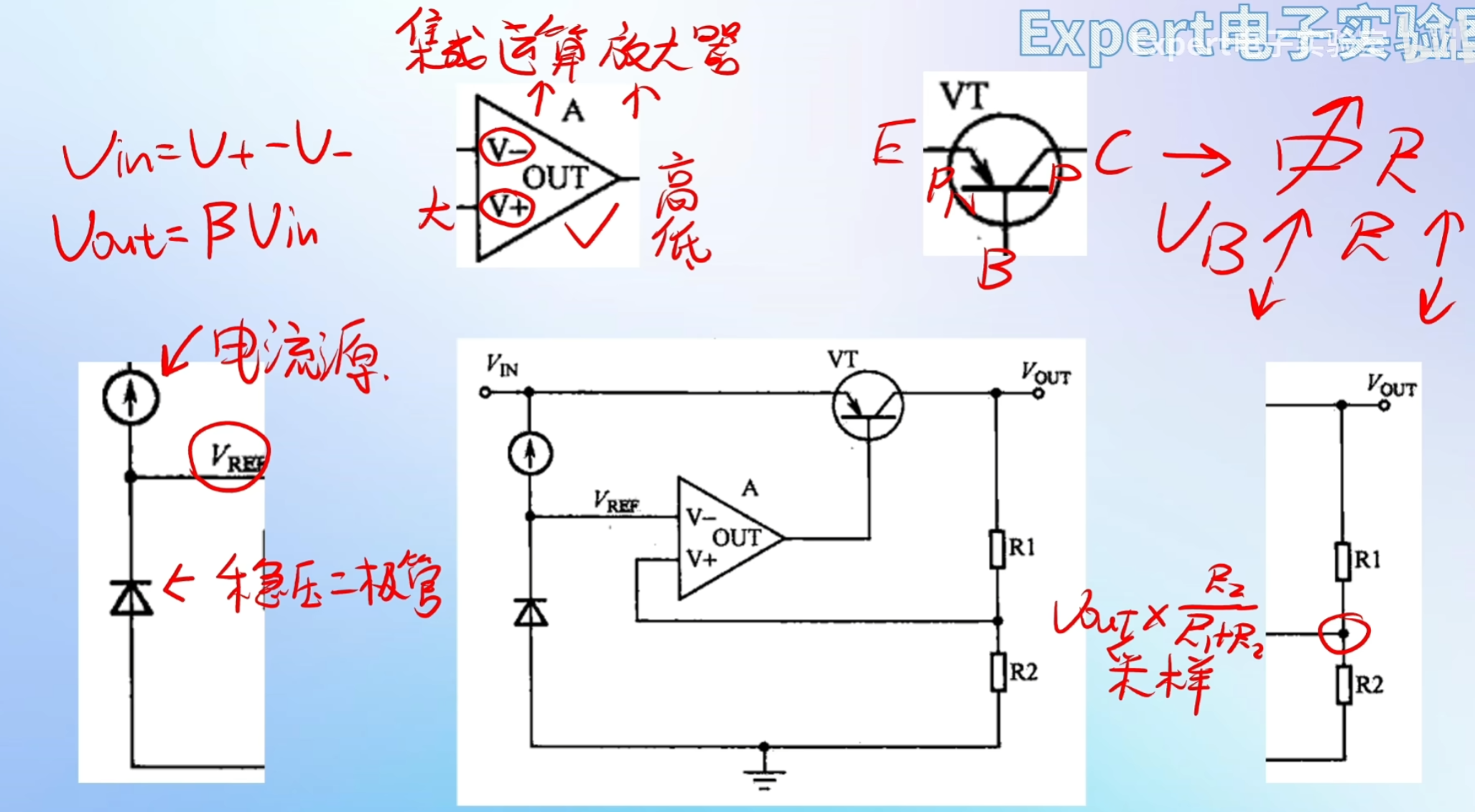
LMS1117电源芯片
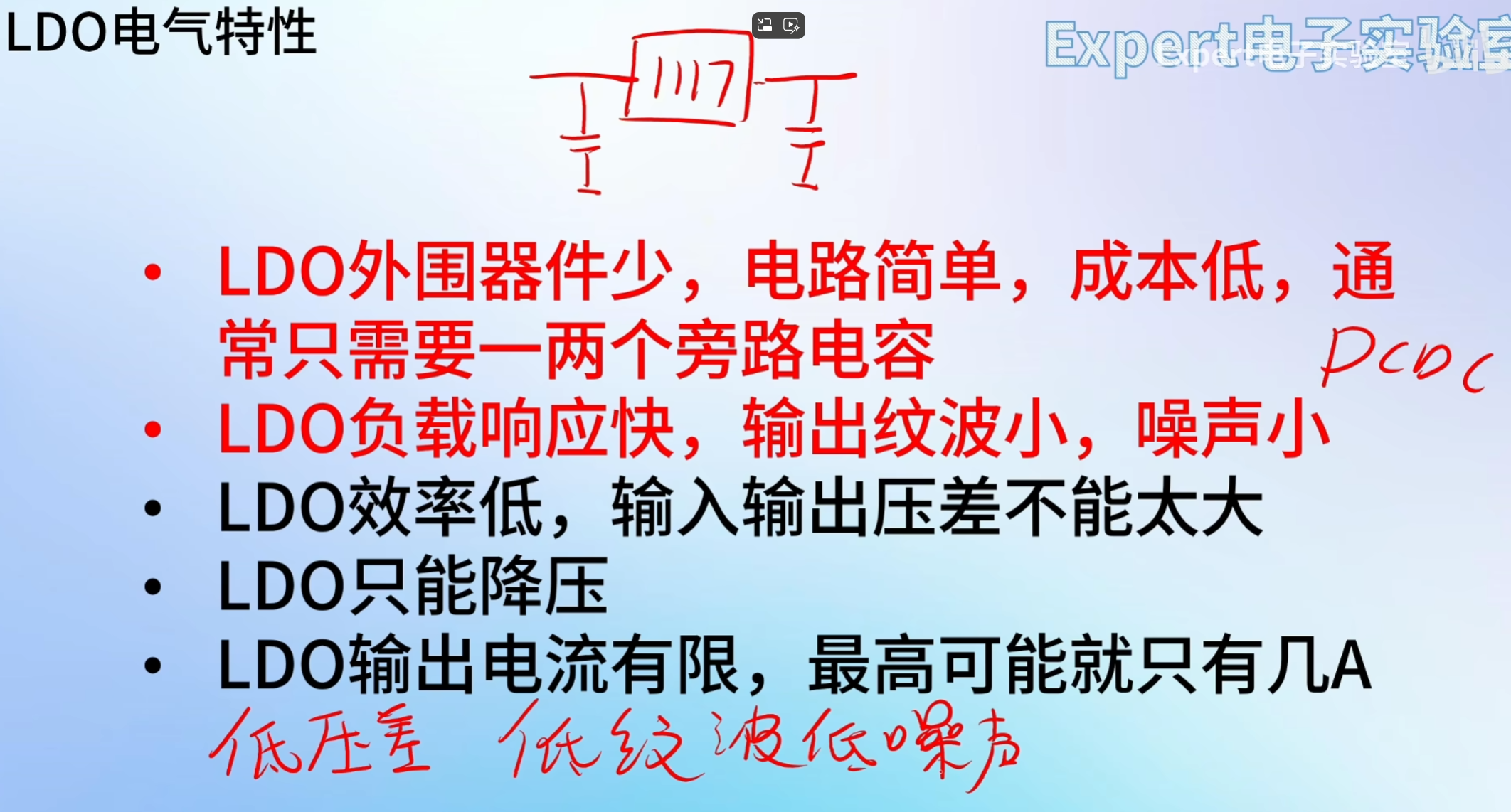
电源稳压器(PowerRegulator)是一种在电源电压或者负载电流发生变化的时候,依然能够提供稳定输出电压的元件。



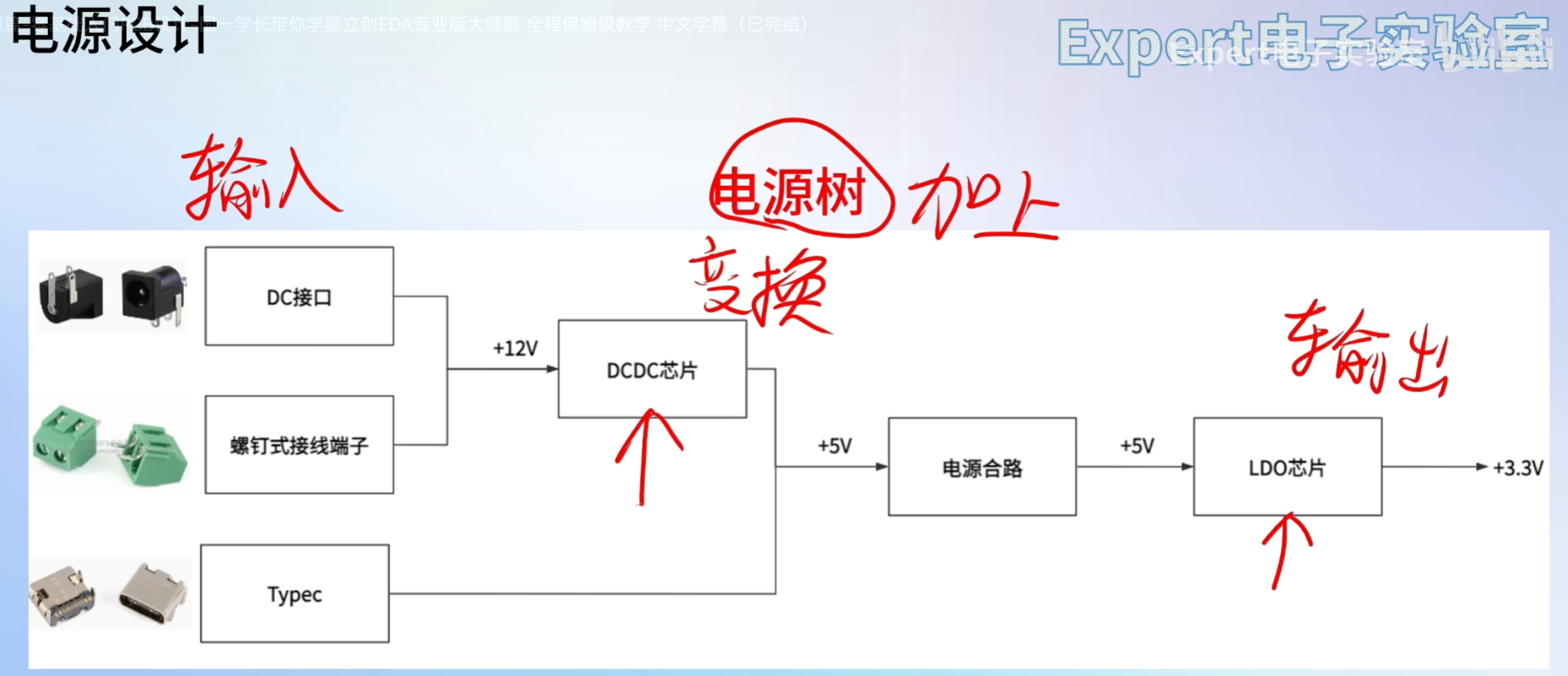


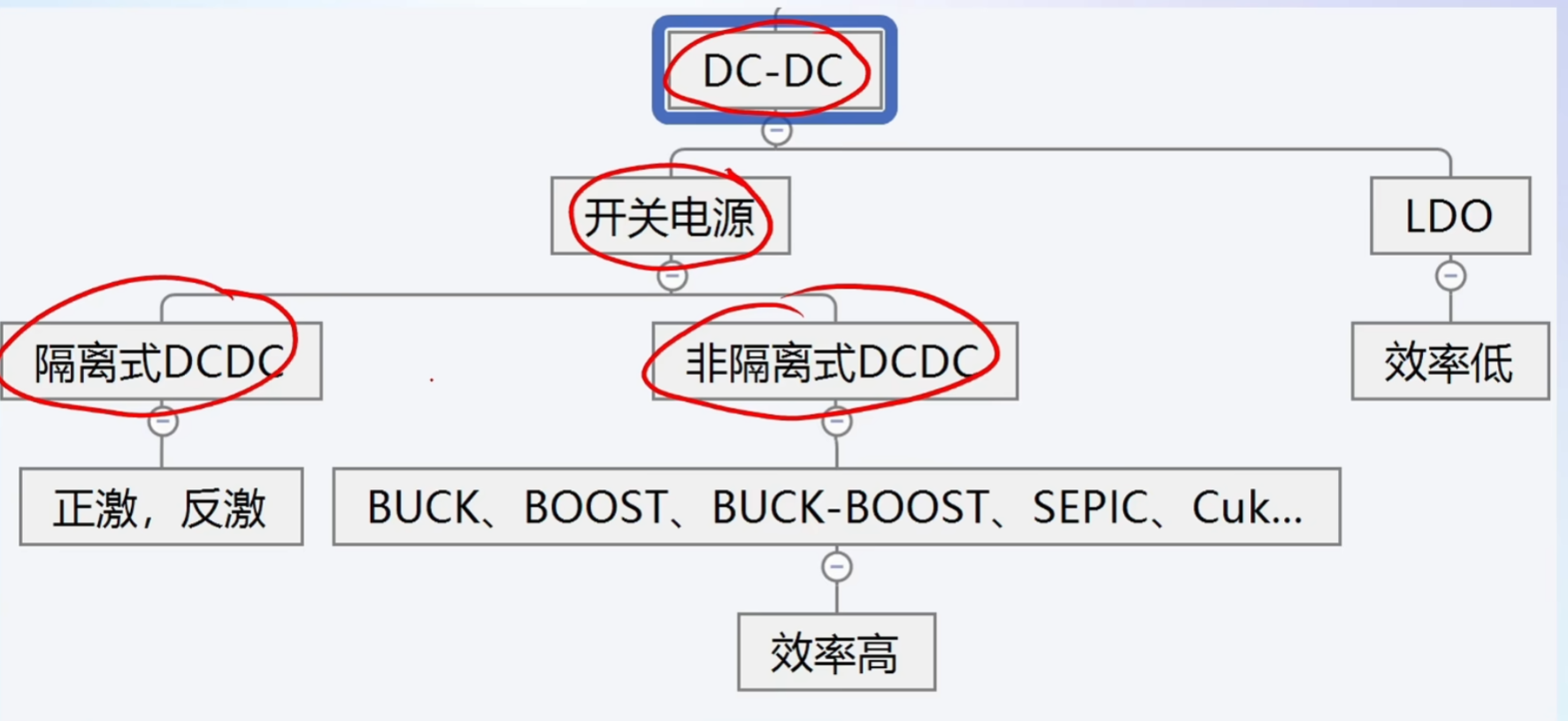
DCDC电源稳压器

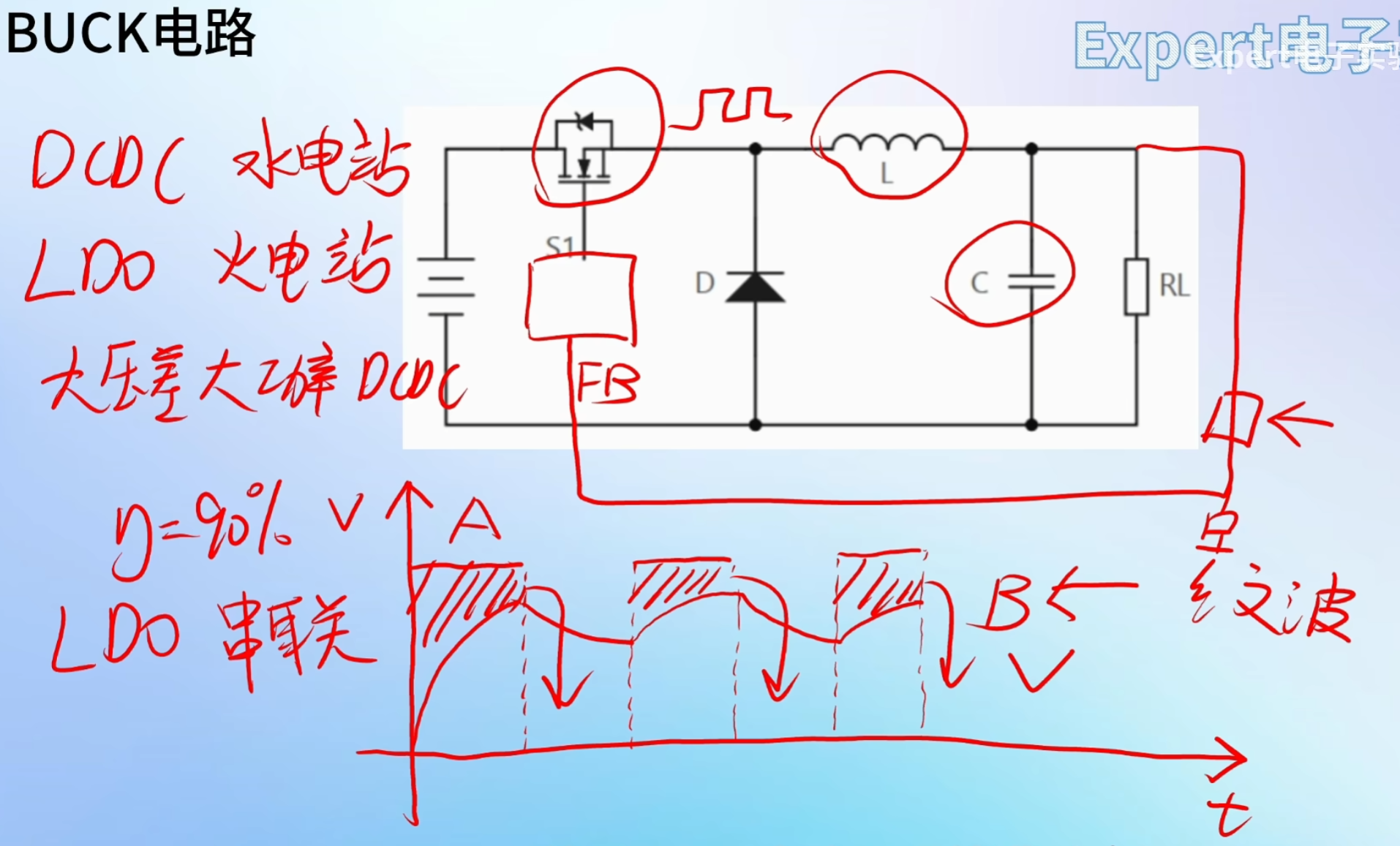
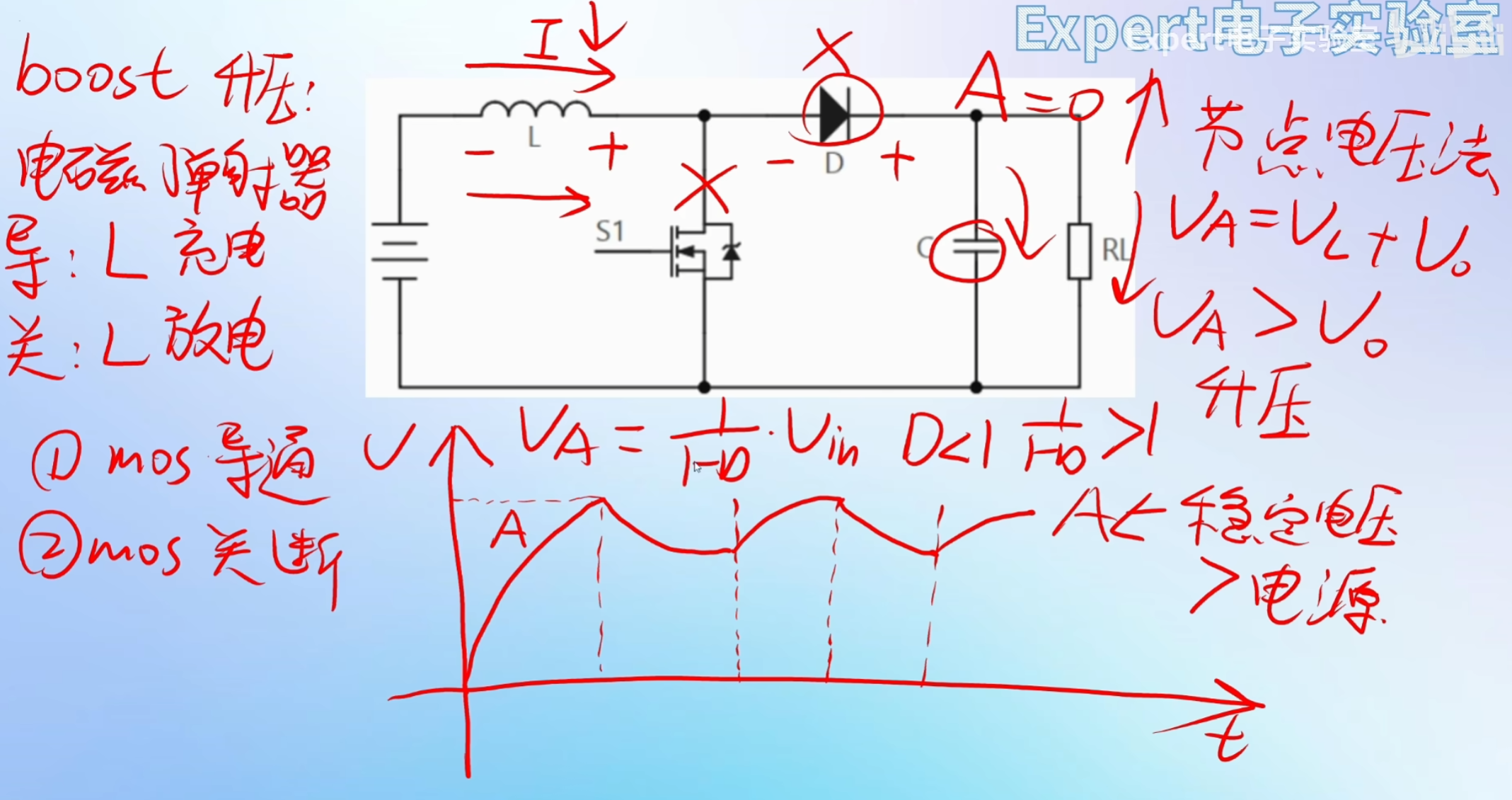
DC/DC转换器一种是开关电源稳压器,指利用电容、电感的储能的特性,通过可控开关(MOSFET等)进行高频开关的动作,将输入的电能储存在电容(感)里,当开关断开时,电能再释放给负载,提供能量。
以降压为目的DCDC电源电路称为BUCK电路
以升压为目的的DCDC电源电路称为BOOST电路
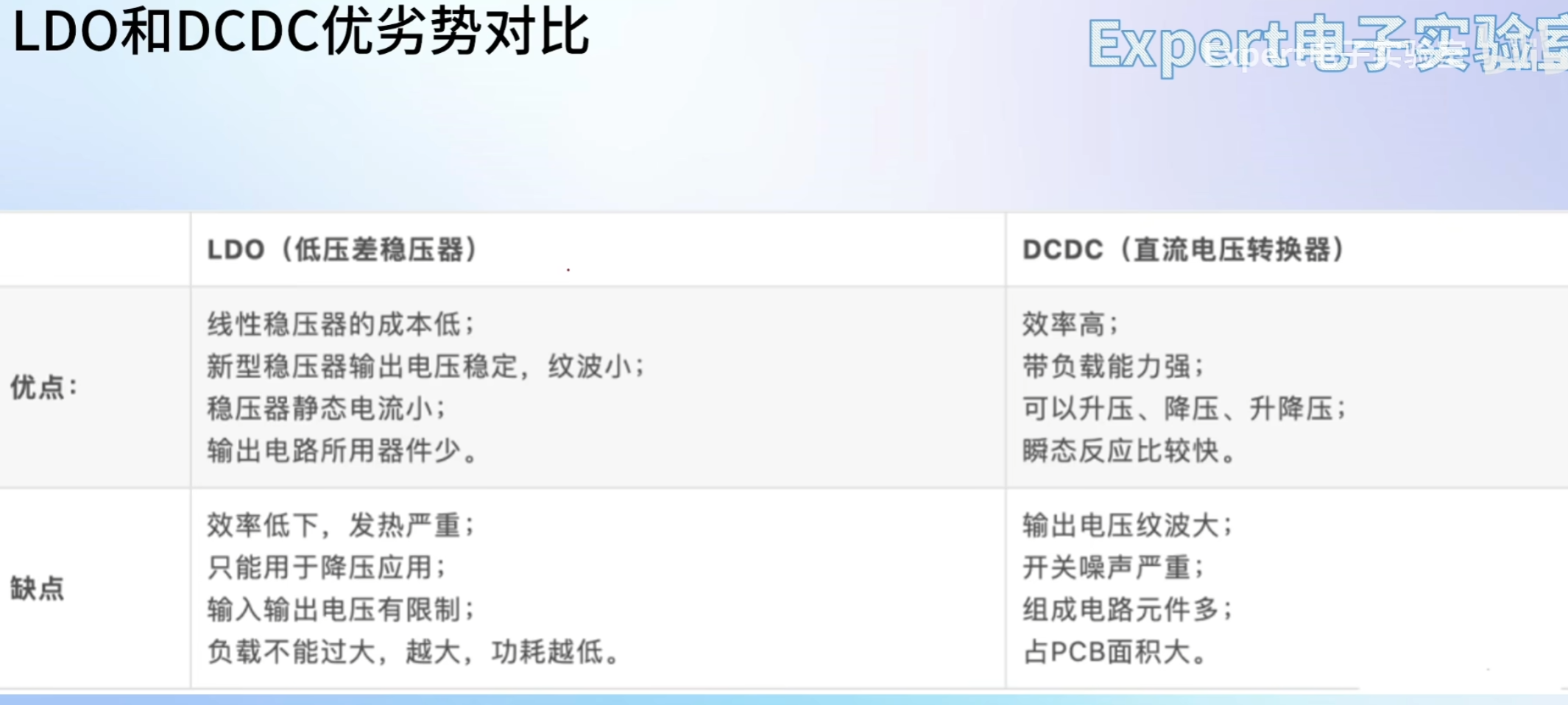
DCDC开关电源电气特性
- DC-DC外围器件多,电路复杂,成本高
- DC-DC负载响应比LDO慢,输出纹波大,噪声大
- DC-DC效率高,输入电压范围宽泛
- DC-DC支持降压和升压
- DC-DC输出电流高,功率大
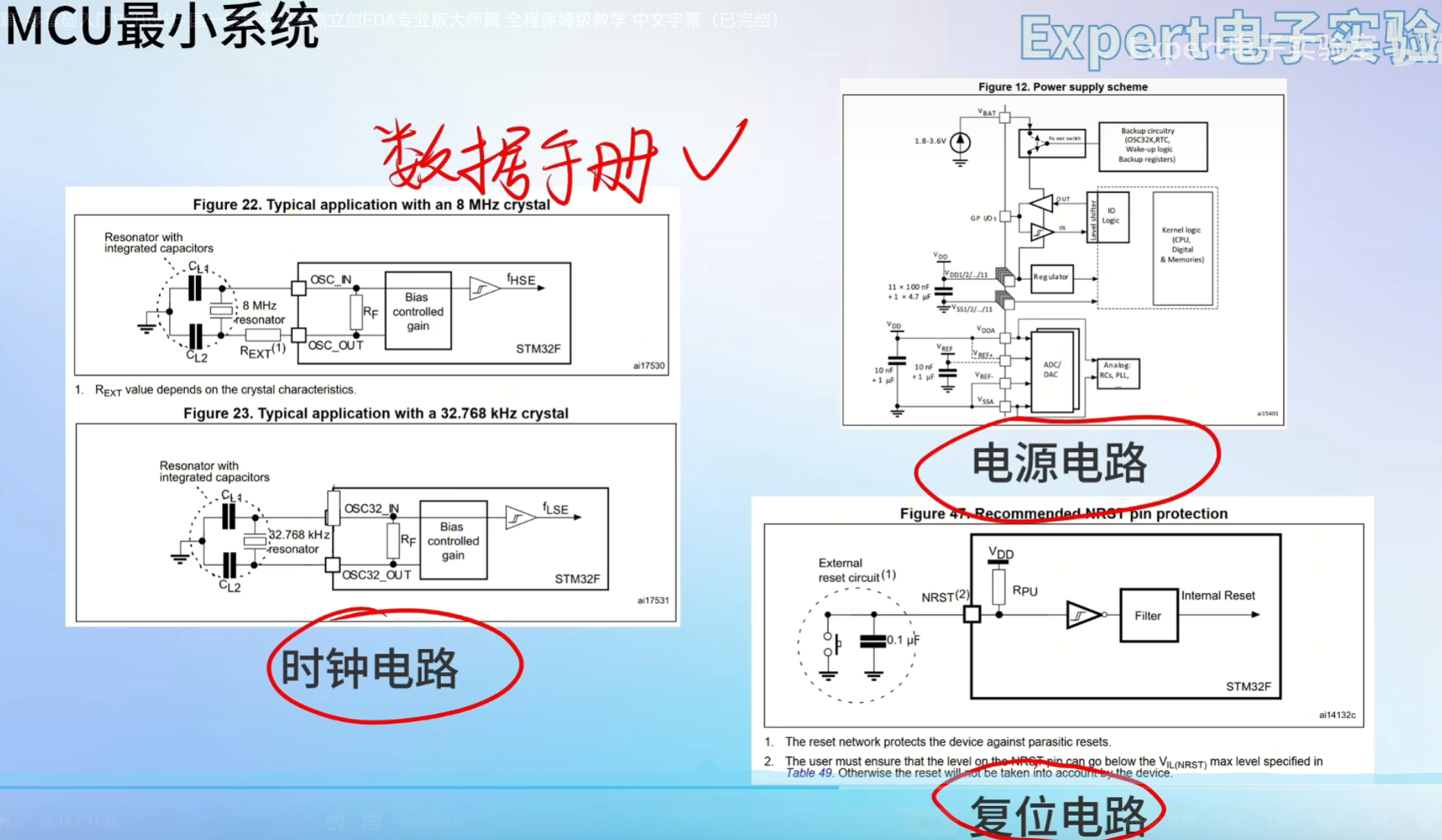
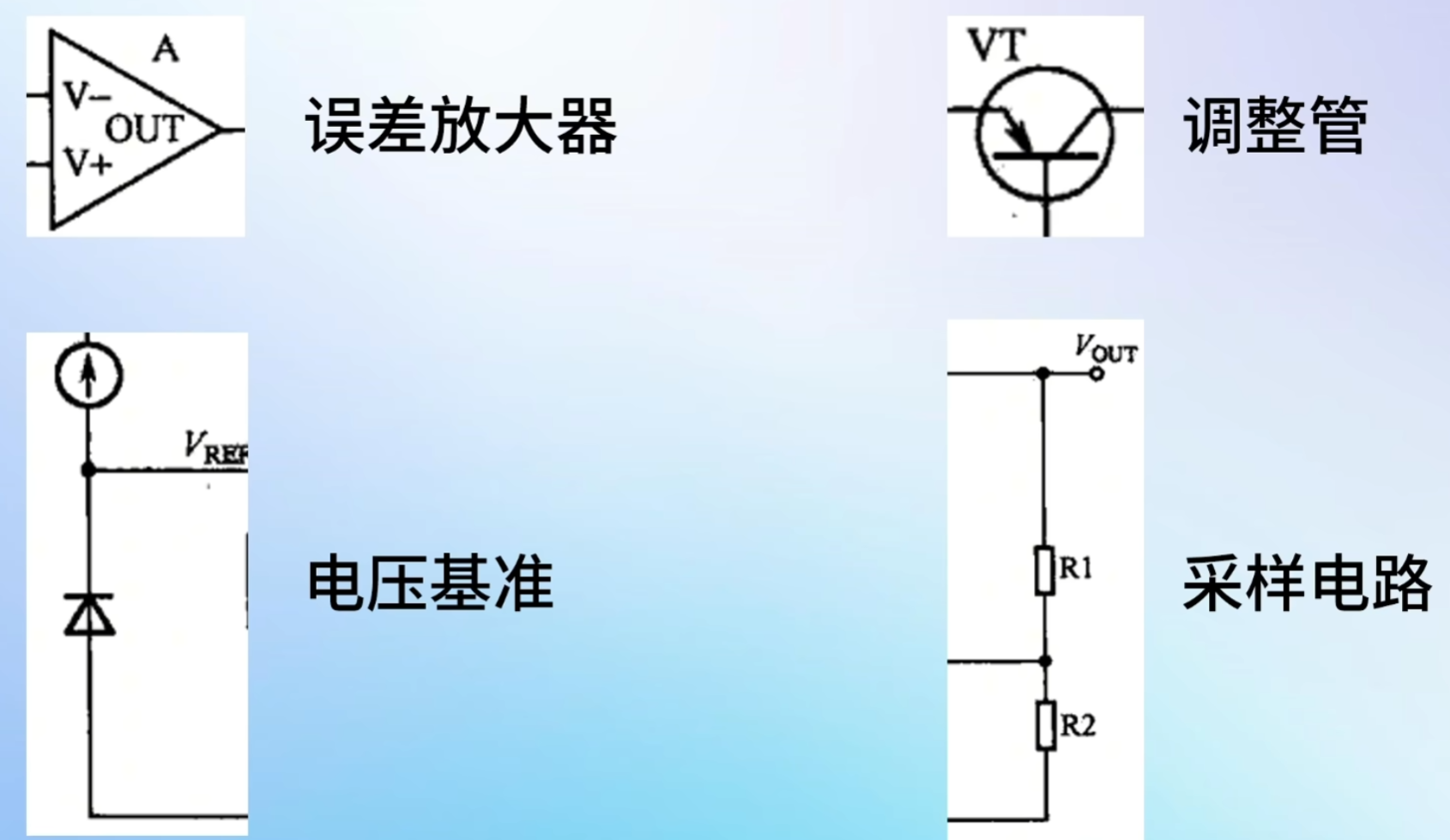
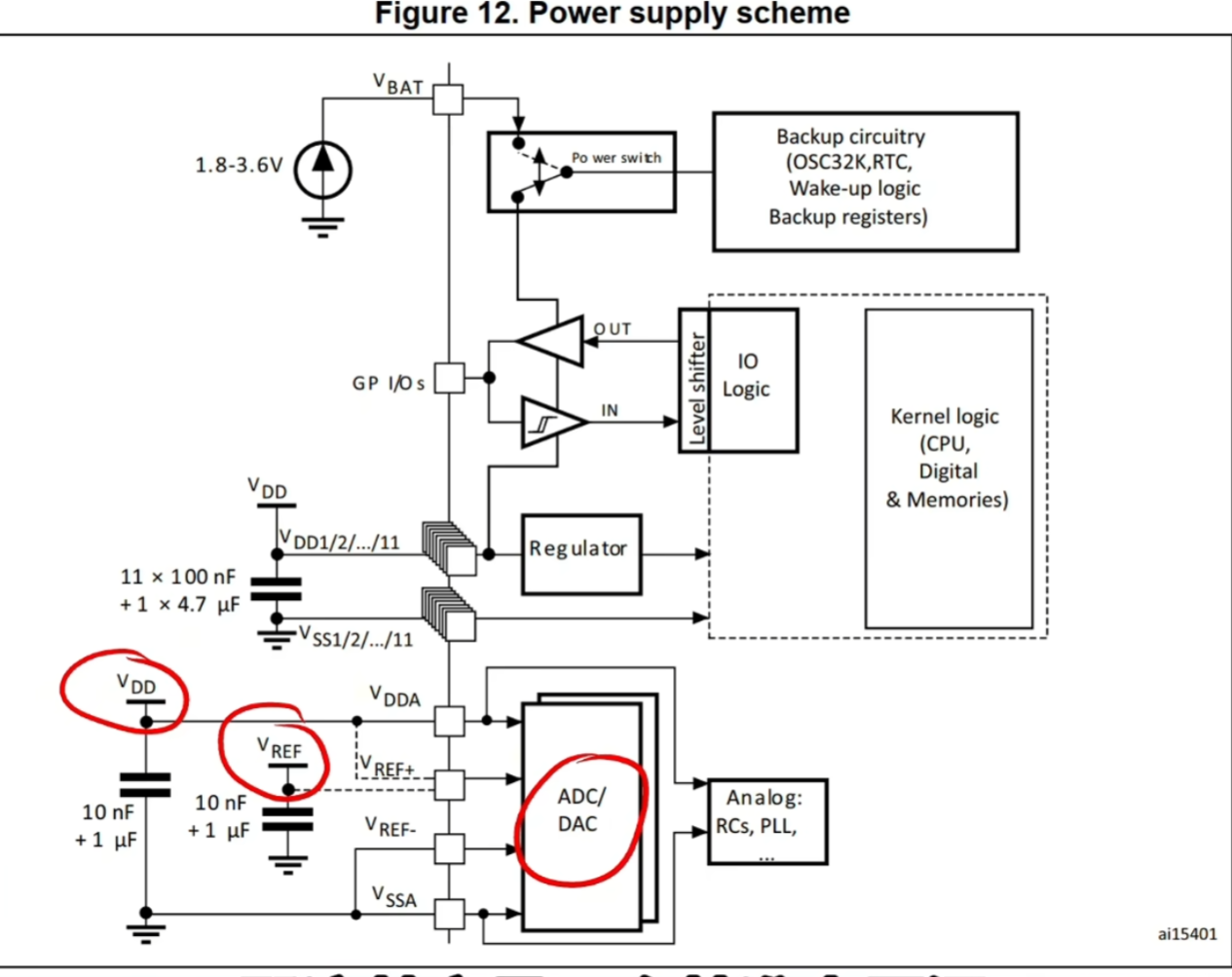
电源电路
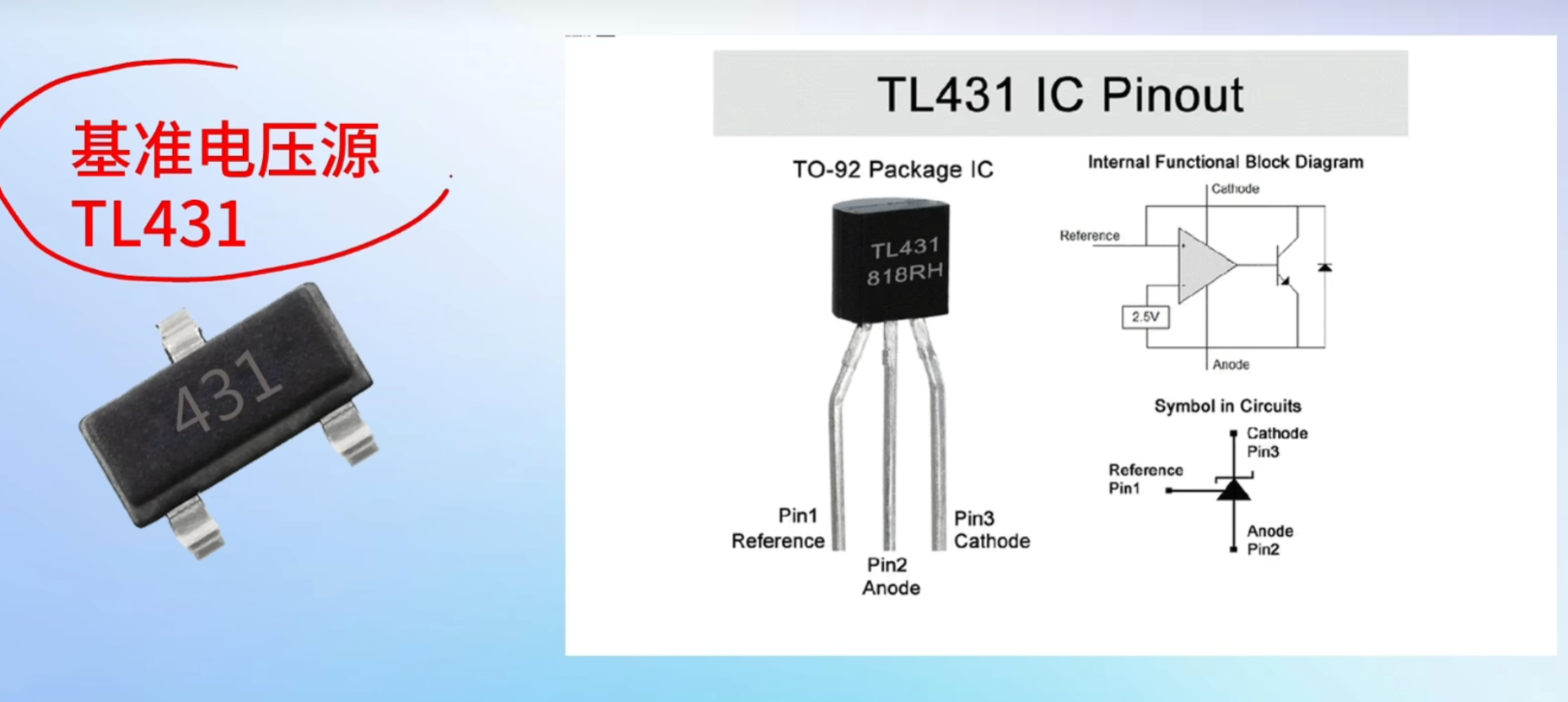
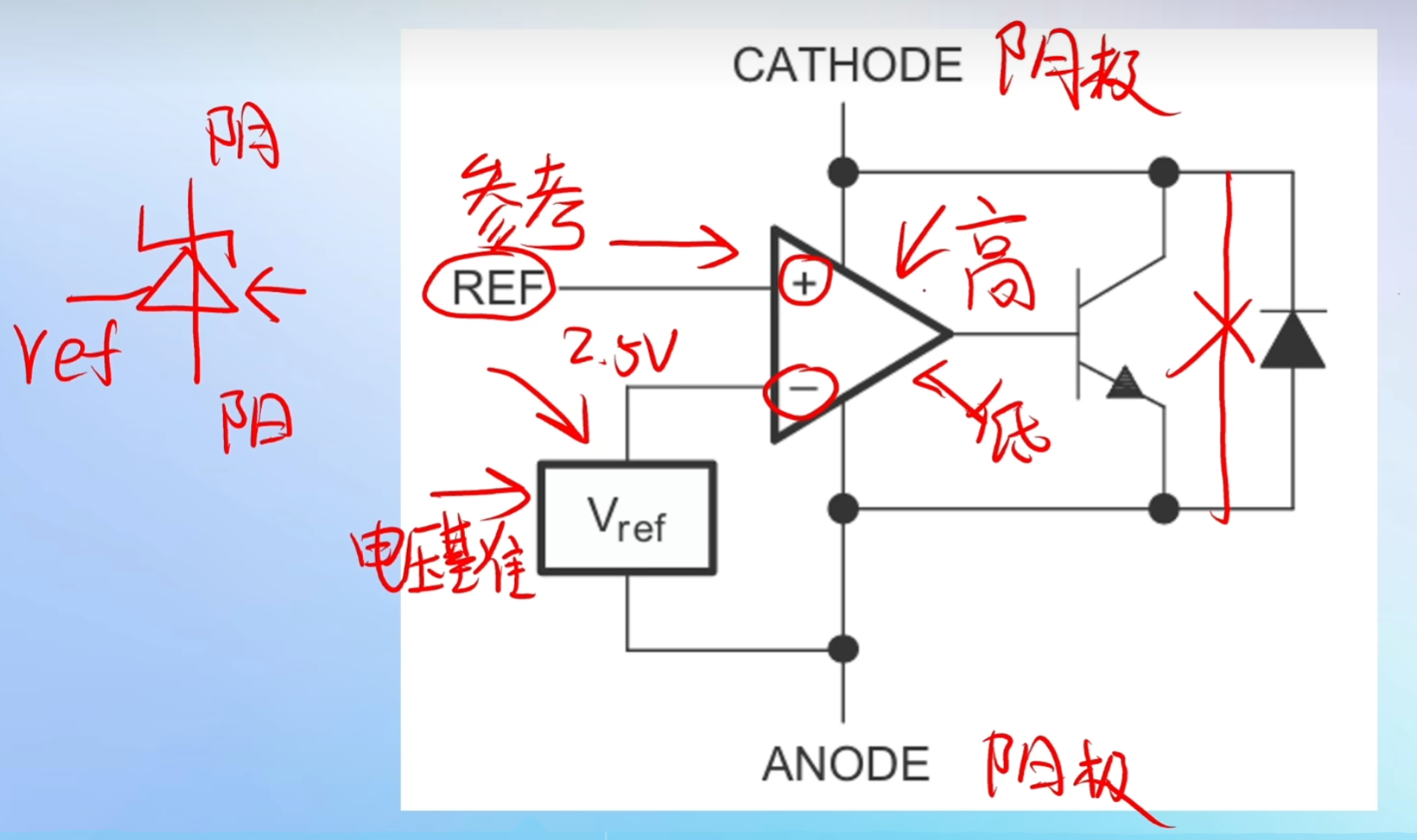
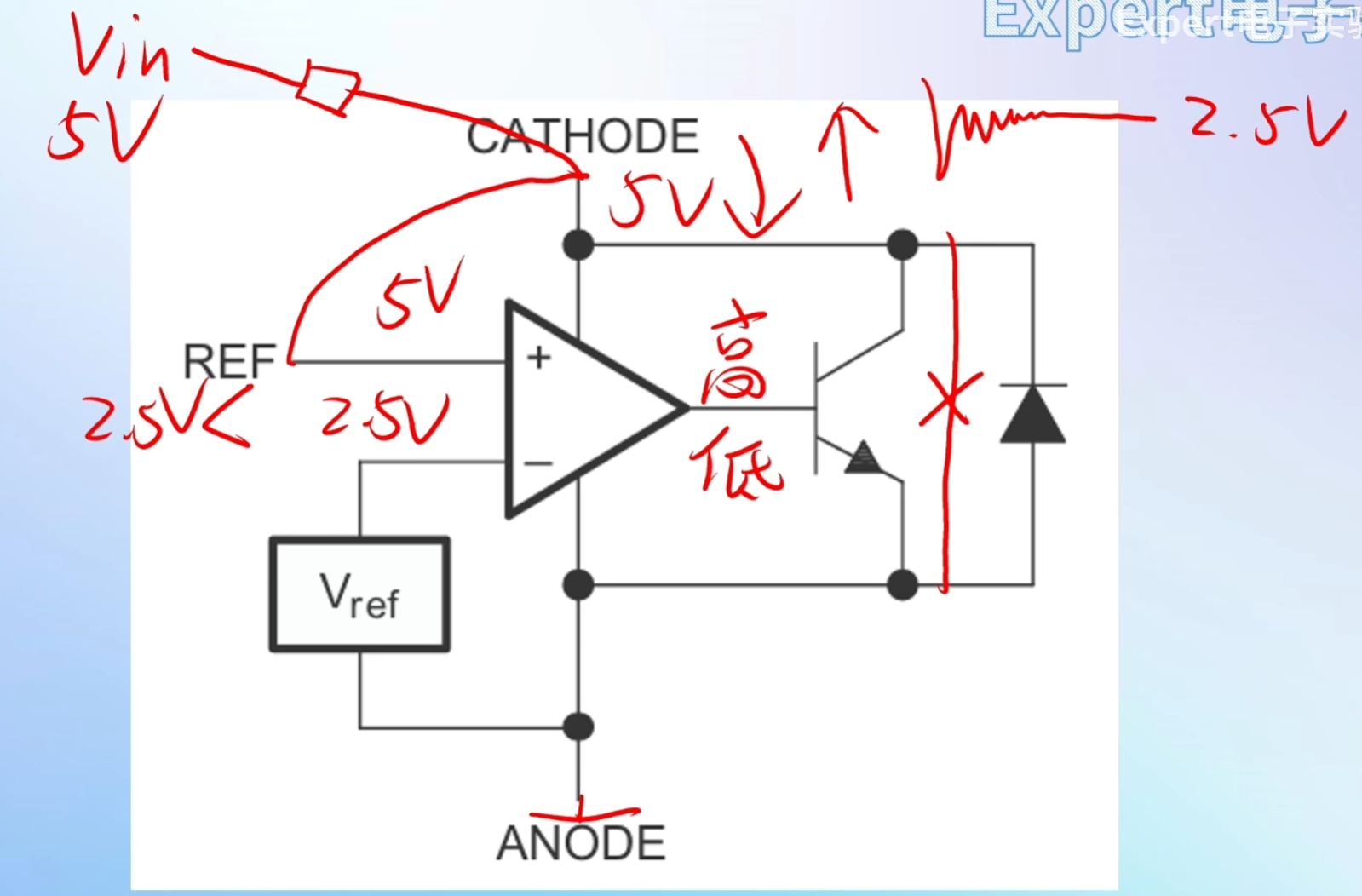
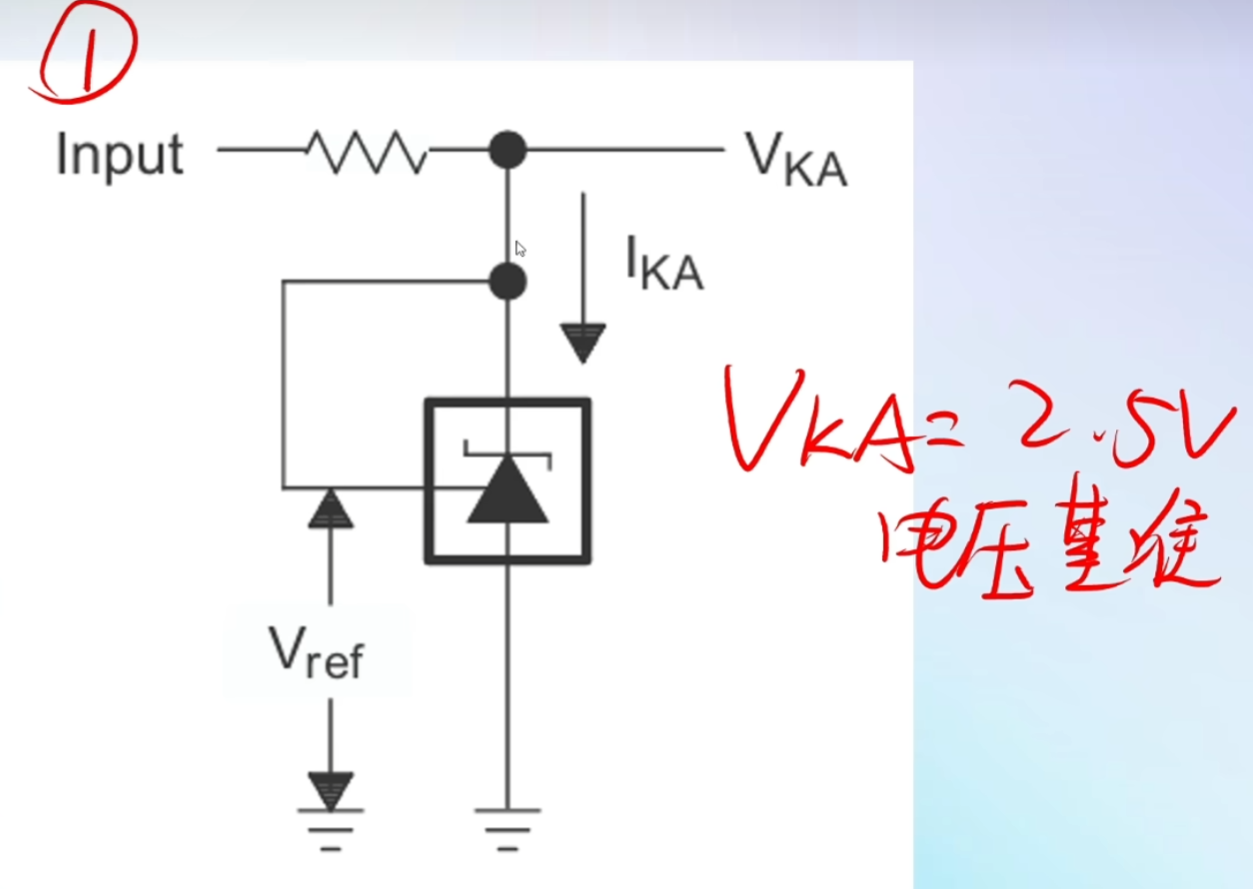
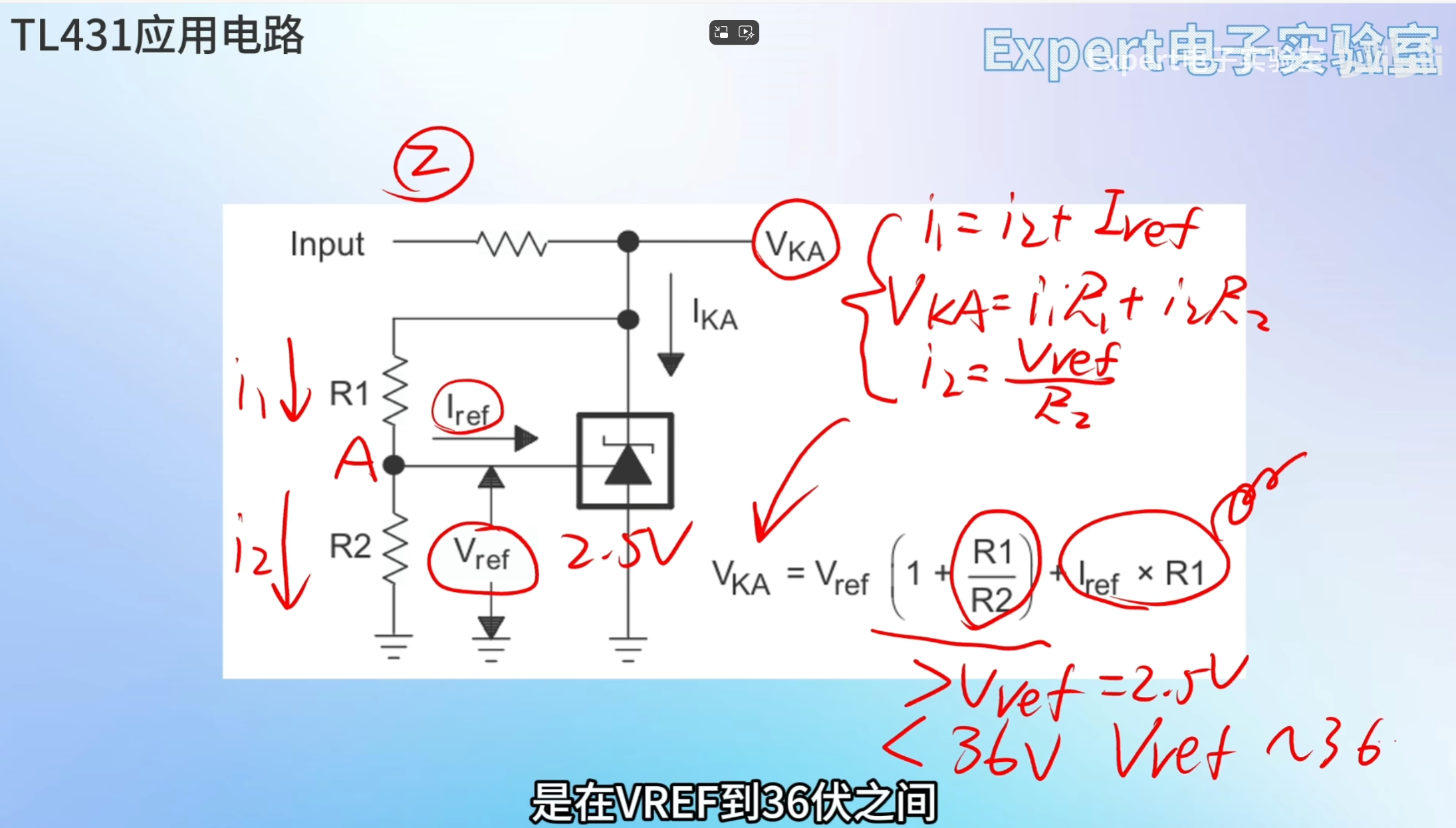
VREF:基准电压源 VDD:数字电源
基准电压源是一种能提供稳定、精确、不随温度、负载、电源电压变化而波动的电压源。它广泛应用于电子电路中,尤其是在需要高精度和稳定性的场合,如模数转换(ADC)、数模转换(DAC)、稳压电路、传感器电路等。
滤波电容:主要作用是去耦和滤波
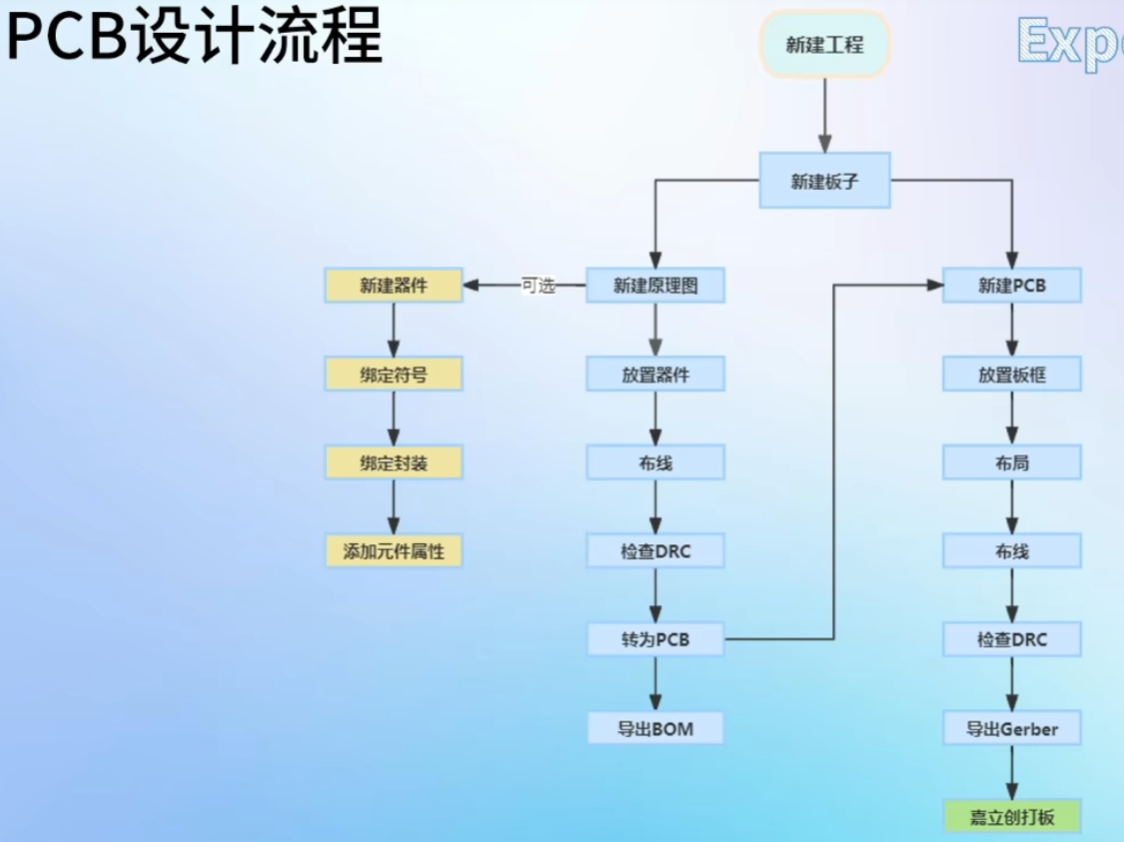
PCB设计流程:
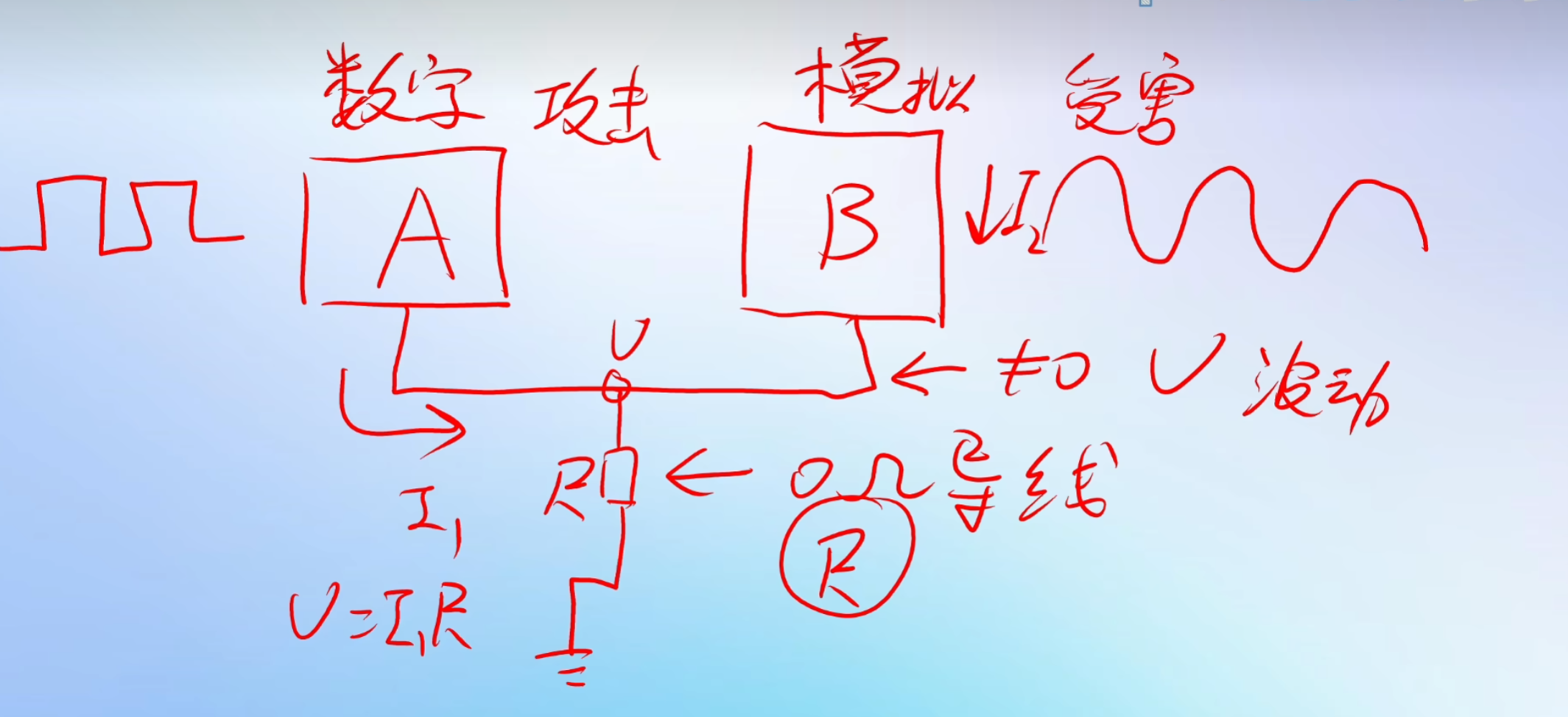
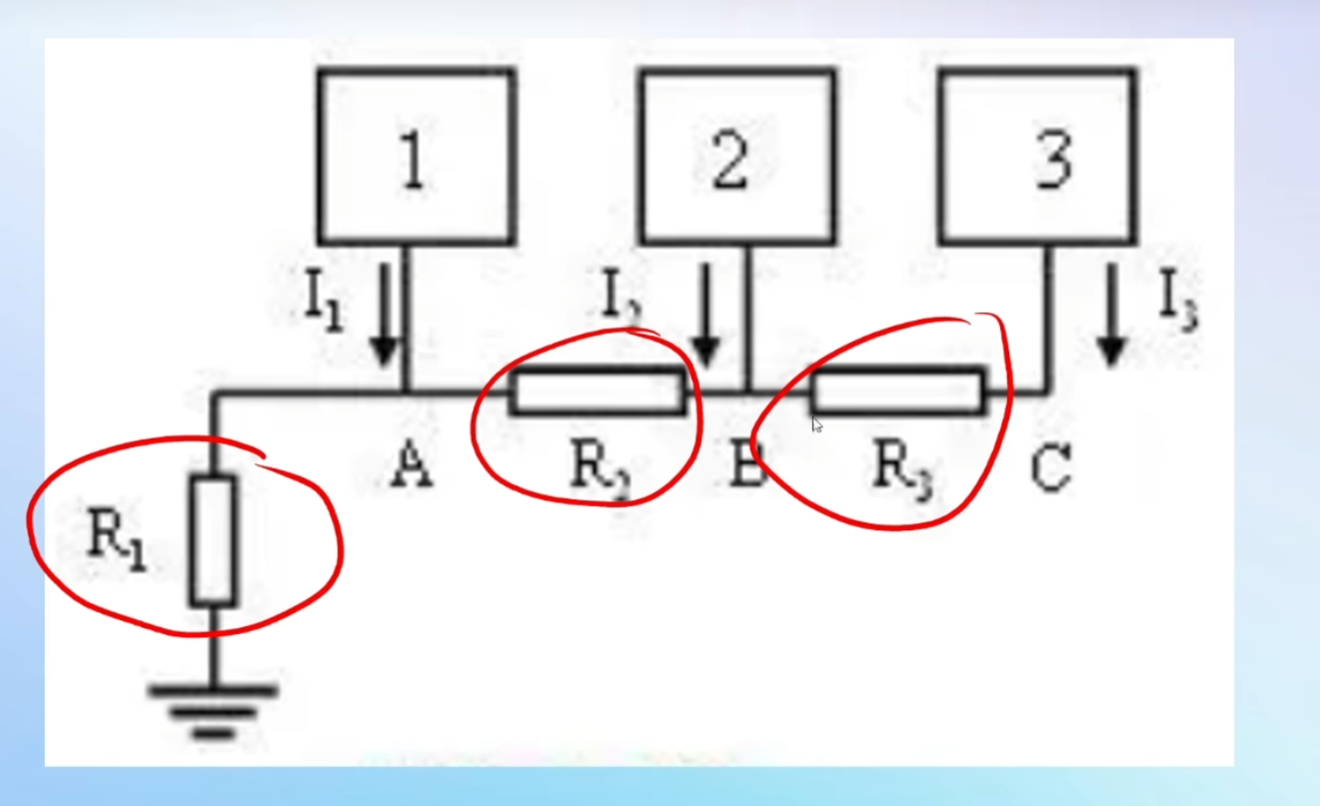
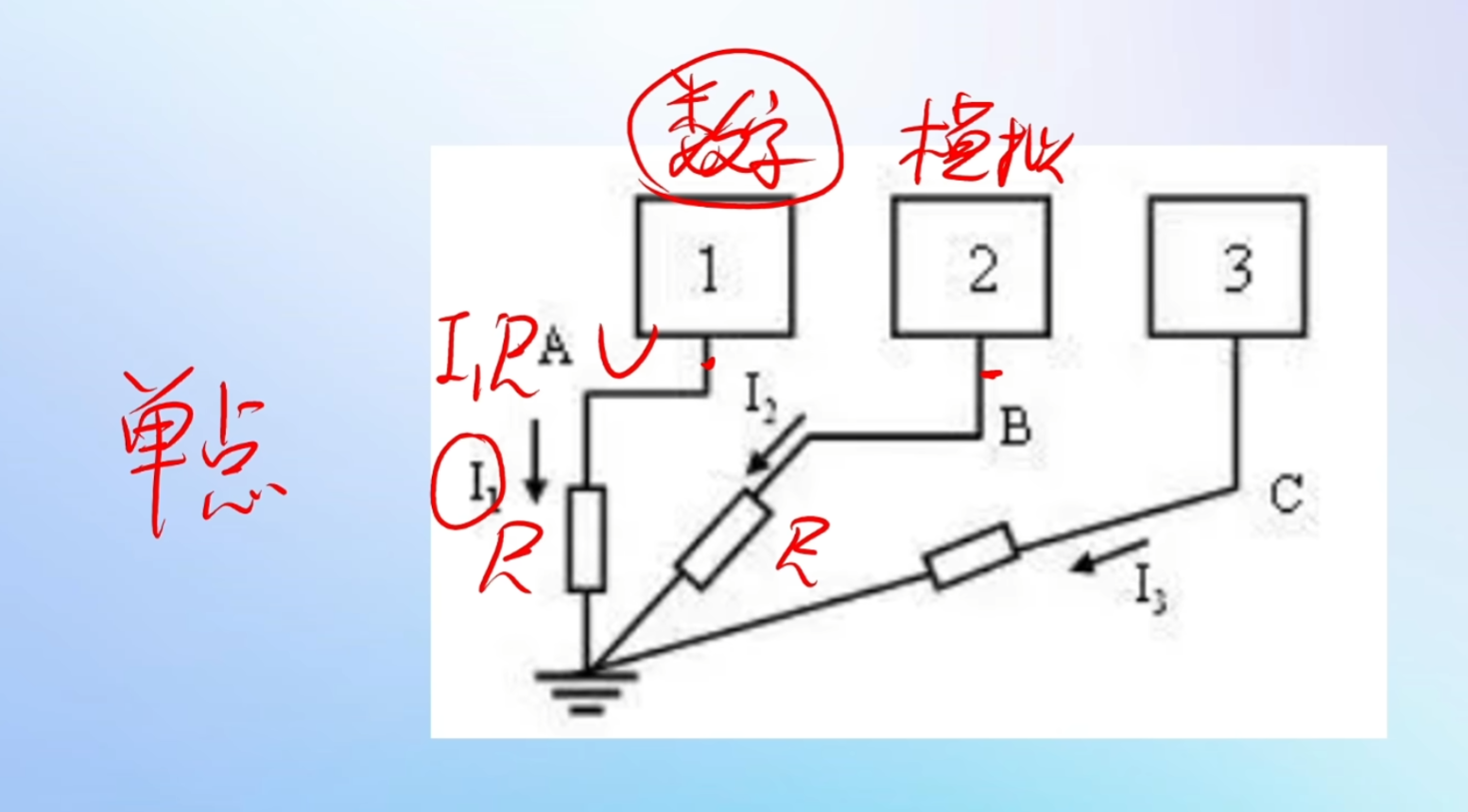
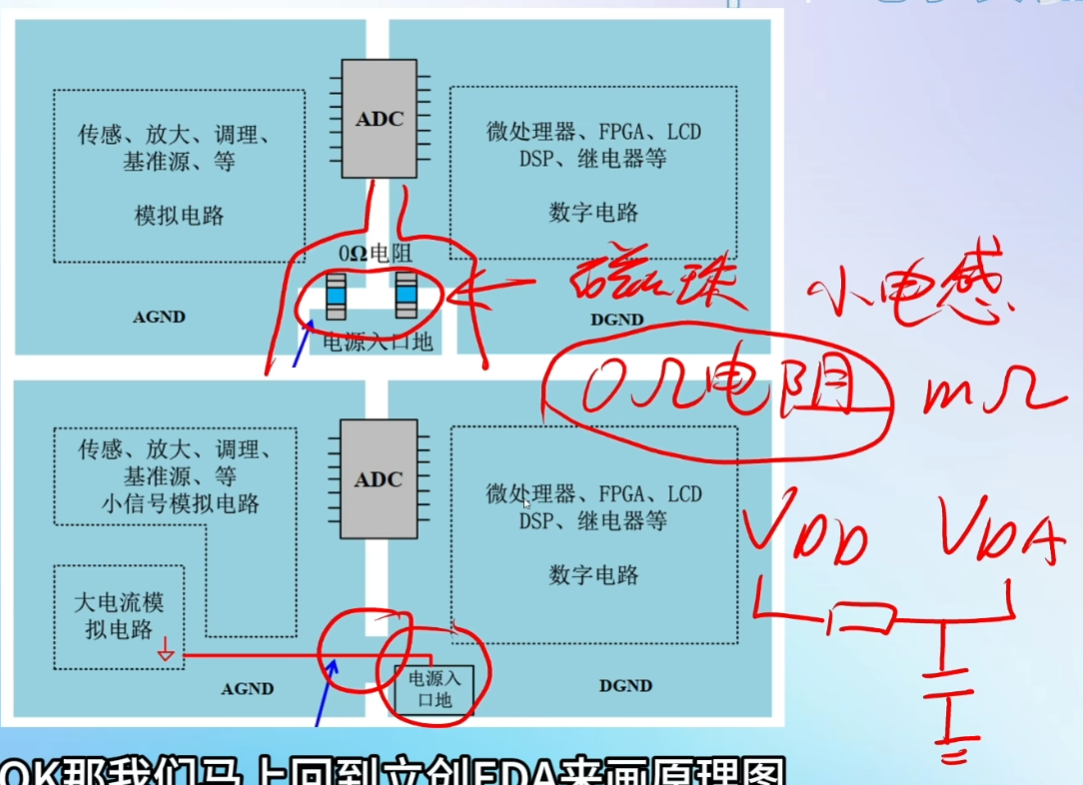
单点接地
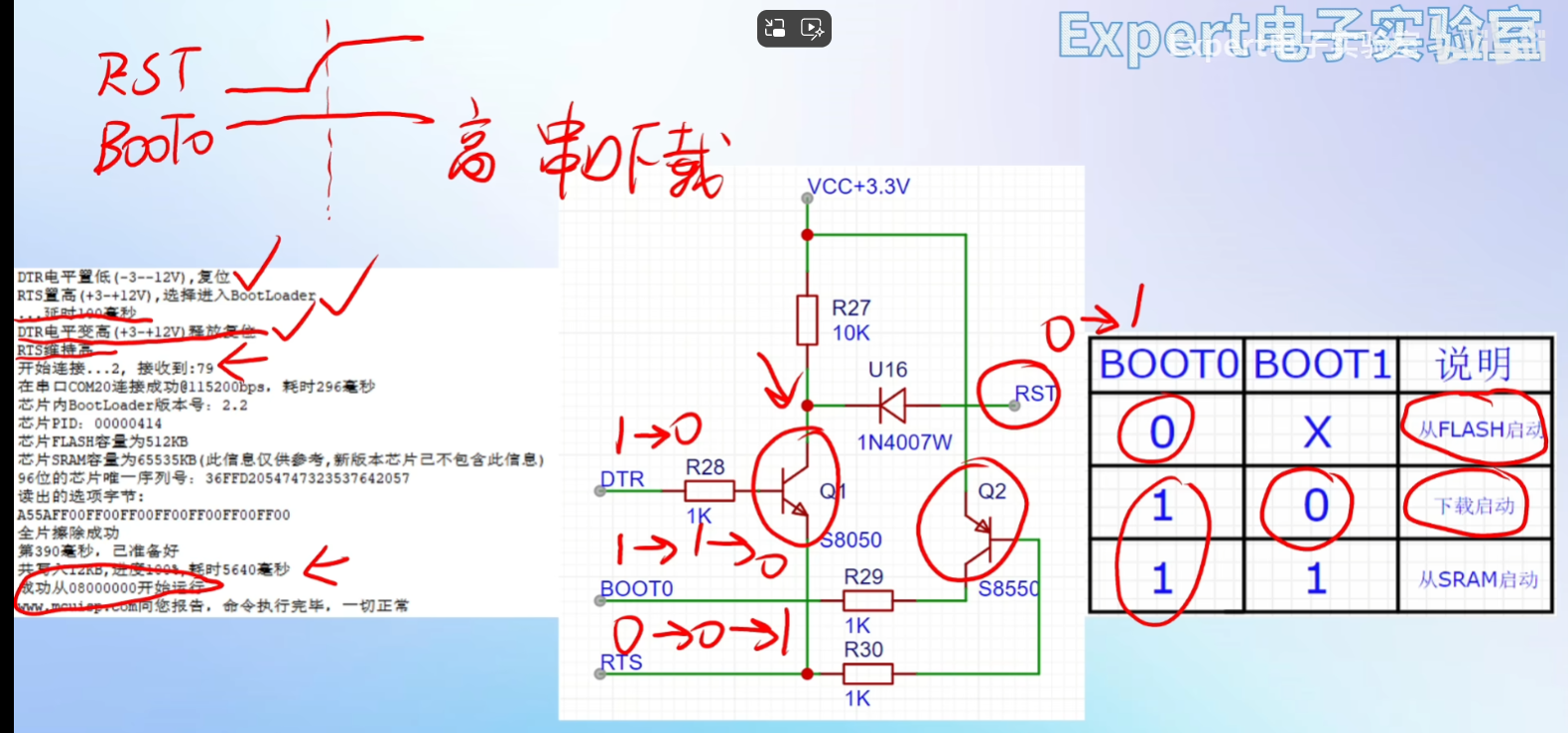
这里调试看调试信息的时候要反着看调试信息
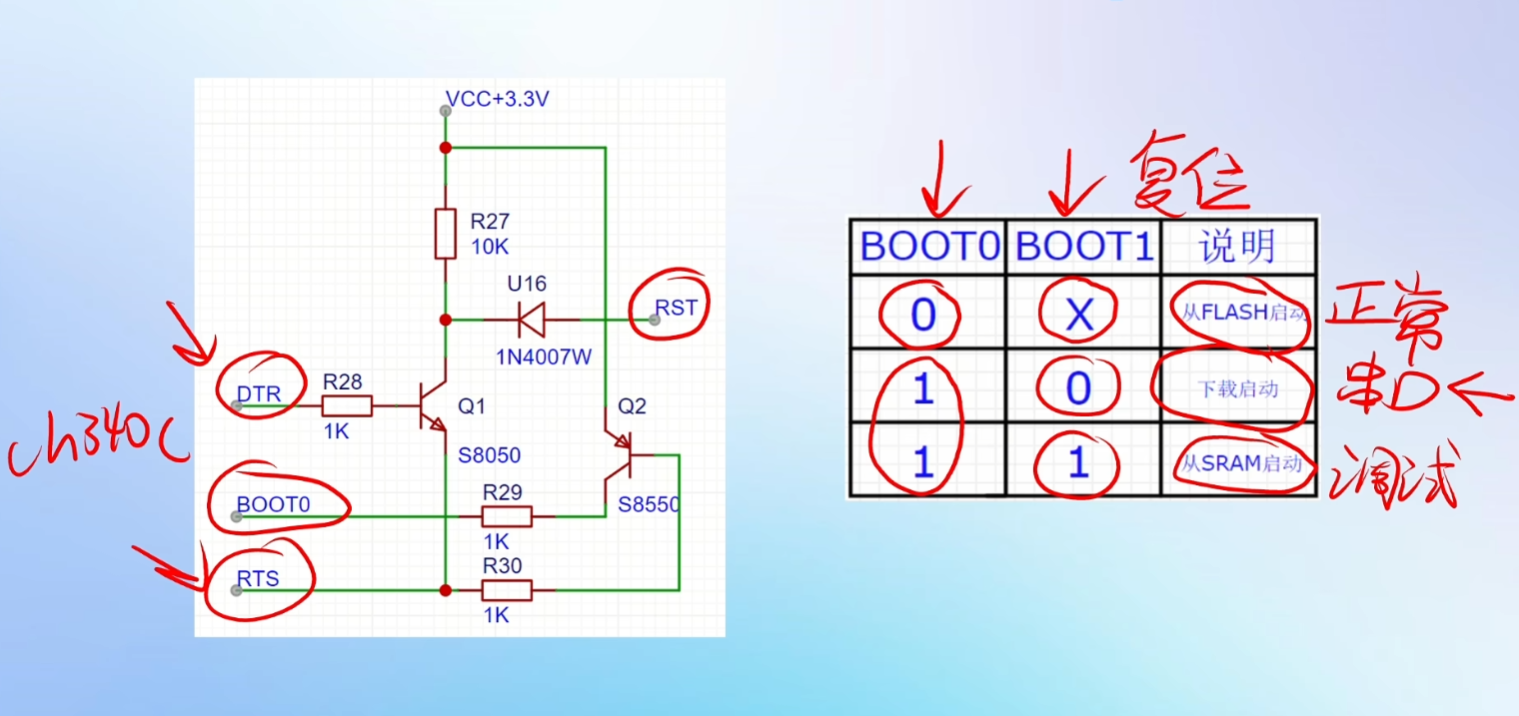
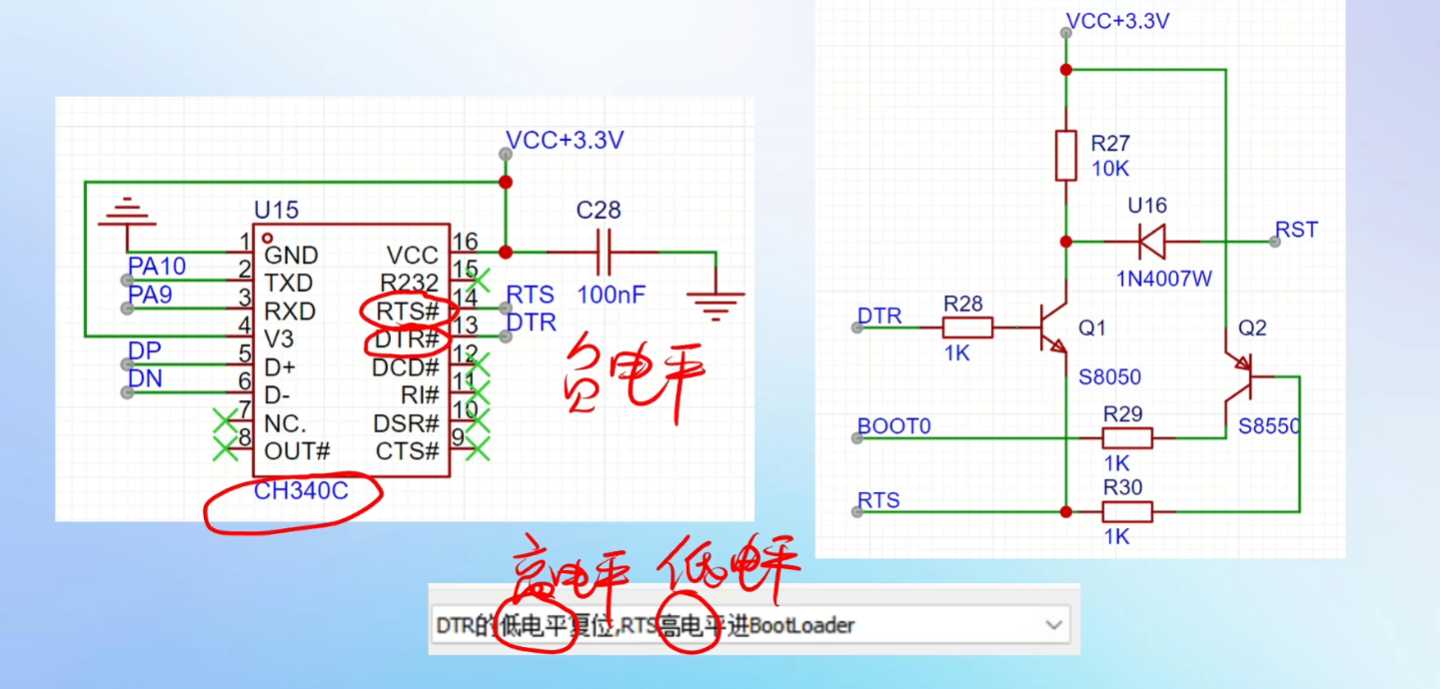
自动下载电路
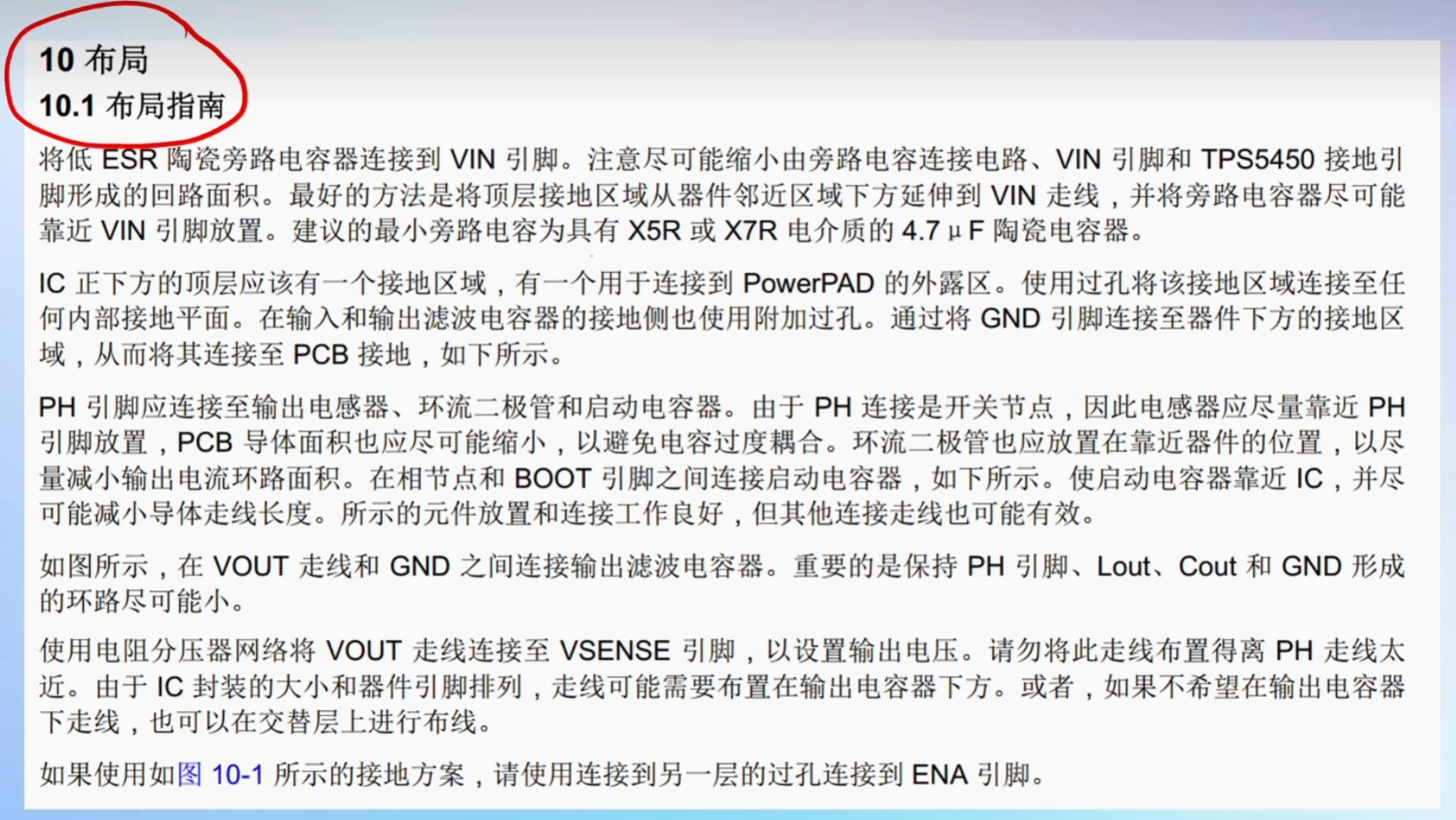
DCDC的布局布线就两点:一是要通顺二是要抗干扰
占空比Duty Cycle):
✅ 概念:
占空比指一个周期中高电平所占的百分比。
举个例子,如果一个周期是10ms,其中高电平持续了2ms,那么占空比就是:
占空比 = (高电平时间 / 周期总时间)× 100% = (2 / 10) × 100% = 20%✅ 实际用途:
在单片机中,占空比常用于控制PWM信号的强弱,从而控制:
电机转速
LED亮度
加热器功率等
比如你用 STM32 控制一个风扇,通过调节PWM的占空比可以实现转速的调节。
二、PWM(脉宽调制 Pulse Width Modulation)✅ 概念:
PWM是一种用**“占空比不同的方波”**来模拟连续电压的方法。
它的本质是数字信号控制模拟设备,将高频数字开关信号进行平滑处理,输出“近似模拟电压”。
✅ 实际用途:
控制LED亮度(0%占空比=灭,100%=最亮)
控制直流电机速度(调节功率)
控制舵机角度(定频+可调脉宽)
控制开关电源/变频器等
⚙️ 例如:STM32 的
TIM1、TIM2定时器就可以生成 PWM 输出,配置相关寄存器如CCR1实现占空比调节。三、PID 控制算法(Proportional-Integral-Derivative)
✅ 概念:
PID是一个闭环控制算法,常用于让系统的实际输出值逐步逼近目标值,具有自动调整的能力。
PID 的三个组成部分:
P(比例): 当前误差响应
I(积分): 累积误差响应
D(微分): 误差变化率响应
输出 = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt✅ 实际用途:
在单片机中,PID 控制常用于:
电机转速稳定控制(比如让风扇保持 1500RPM)
平衡车姿态控制(如MPU6050 + PID 控制电机输出)
温度控制(加热器温控)
PID本身是一种算法,和数学计算有关;
实现时可能会:
用结构体存储PID参数(Kp, Ki, Kd,历史误差值等)
用变量缓存上一时刻误差值、积分累计值等
在复杂系统中(如多轴控制),可能用数组或队列来管理多个PID通道