openmv特征点检测
AGAST 角点检测器和 FAST 角点检测器:
两者都是计算机视觉中快速检测图像角点的算法,核心目的是高效找到图像中 "有辨识度的点",但细节略有不同:
(1)FAST 角点检测器
• 特点:速度极快,专门为实时场景设计(比如摄像头实时跟踪)。
• 原理:判断一个点是否为角点时,只看它周围 16 个像素(形成一个圆)。如果其中连续 12 个以上的像素,要么都比它亮很多,要么都比它暗很多,就判定为角点。
• 优势:计算简单,速度快,适合嵌入式设备(如 OpenMV 摄像头)。
• 缺点:对噪声较敏感(可能误判一些不是角点的点)。
(2)AGAST 角点检测器(
• 特点:FAST 算法的改进版,更灵活,适应性更强。
• 原理:在 FAST 基础上优化了判断逻辑,不需要固定检查 16 个像素,而是根据图像局部特征动态调整检查的像素数量和位置。
• 优势:在保持速度的同时,减少了误判,对不同类型的图像(比如明暗差异大或小的场景)适应性更好。
core_detector用来控制使用的角点检测的算法,默认是AGAST角点检测
normalized是布尔值。若为True,在多分辨率下关闭提取键点。
#normalized=True 表示 “归一化提取”,即只从图像的原始尺度(不进行多尺度缩放)中提取关键点。
#这是为了让 kpts2 的提取方式与 kpts1 中的某一尺度保持一致,确保两者能正确匹配(避免因缩放差异导致特征点无法对应)
image.match_descriptor(kpts1, kpts2, threshold=85)
LBP描述符,这个函数返回的是一个体现两个描述符之间区别的整数
如果返回值越小,证明两者越匹配
对于ORB描述符来说,这个函数返回的是一个kptmatch对象,
kptmatch.rect()返回矩形元组(匹配到的物体特征的外界矩形的框框)
import sensor
import time
import image
# Reset sensor
sensor.reset()
# Sensor settings
sensor.set_contrast(3)
sensor.set_gainceiling(16)
sensor.set_framesize(sensor.VGA)#640*480
sensor.set_windowing((320, 240))
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.skip_frames(time=2000)
sensor.set_auto_gain(False, gain_db=100)
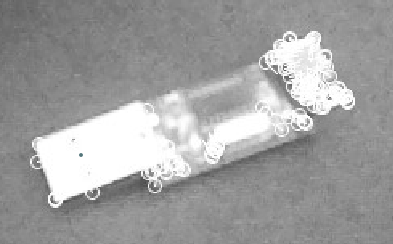
def draw_keypoints(img, kpts):
if kpts:
print(kpts) # 在控制台打印这些特征点的具体数据
# (比如每个点的坐标是多少,长什么样,计算机能看懂的信息)
img.draw_keypoints(kpts)# 在画面上把这些特征点画出来
# (会在每个特征点的位置画个小圆圈或十字,我们肉眼就能看到了)
img = sensor.snapshot()
time.sleep_ms(1000)
kpts1 = None
#因为程序刚启动时还没看到任何物体,所以先设为空,等摄像头捕捉到第一帧图像后,再从中提取特征点存入kpts1
#不建议从文件中导入特征
#因为每次运行的时候,环境不一样,背景不一样,光线不一样
clock = time.clock()
while True:
clock.tick()
img = sensor.snapshot()
if kpts1 is None:
# 判断:是不是第一次运行?(kpts1还是空的)
# 如果是第一次,就从当前画面中"提取物体的特征点"
kpts1 = img.find_keypoints(max_keypoints=150, threshold=10, scale_factor=1.2)
draw_keypoints(img, kpts1)
else:
kpts2 = img.find_keypoints(max_keypoints=150, threshold=10, normalized=True)
# 变量 kpts2 用来存储当前帧图像中提取的关键点,和初始帧的 kpts1 对应。
if kpts2:
match = image.match_descriptor(kpts1, kpts2, threshold=85)
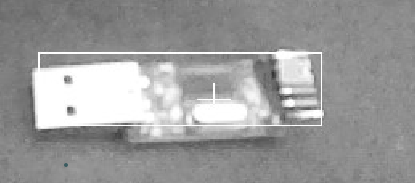
if match.count() > 10:
# If we have at least n "good matches"
# Draw bounding rectangle and cross.
img.draw_rectangle(match.rect())
img.draw_cross(match.cx(), match.cy(), size=10)
print(kpts2, "matched:%d dt:%d" % (match.count(), match.theta()))
# Draw FPS
img.draw_string(0, 0, "FPS:%.2f" % (clock.fps()))