语言特性适用的场景:卫星、火箭控制系统用什么开发语言?
核心飞行控制系统开发语言
卫星、火箭及相关航天系统的软件开发对可靠性、实时性、安全性有极高要求,因此语言选择需严格匹配这些需求。以下是航天领域常用的编程语言及其应用场景分析:
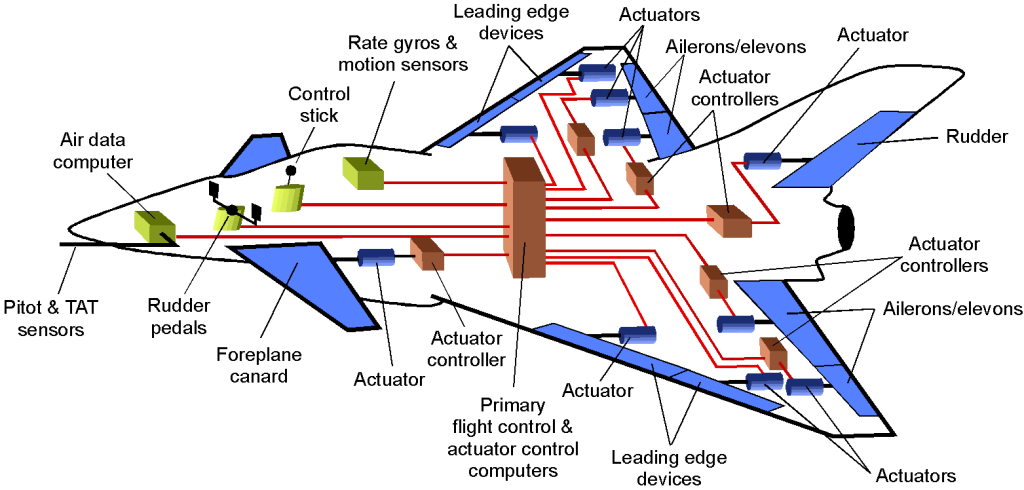
一、核心飞行控制与嵌入式系统:C、C++、Ada
航天器的核心控制系统(如飞控软件、推进系统、导航制导系统)通常运行在资源受限的嵌入式硬件上(如星载计算机、火箭控制系统),需要直接操作硬件、处理实时传感器数据并执行关键决策。这类场景对语言的要求是高效、可控、低开销,因此:
1. C语言
- 地位:航天领域最主流的语言之一,尤其在嵌入式实时系统中占据主导。
- 原因:C语言语法简洁、接近底层硬件(支持指针操作),编译后生成的目标代码效率高(内存占用小、执行速度快),非常适合资源有限的嵌入式环境。
- 应用案例:NASA的火星探测器(如“好奇号”“毅力号”)、欧空局的卫星(如伽利略导航卫星)、火箭的飞行控制软件(如SpaceX的猎鹰9号部分子系统)均大量使用C语言。
2. C++
- 地位:在需要面向对象设计(OOP)或模块化复用的复杂系统中逐渐普及。
- 原因:C++在保持C语言高效性的同时,支持类、继承、模板等特性,更适合大型系统的架构设计(如多传感器融合、分布式系统通信)。
- 限制:需严格控制内存管理(避免碎片化、泄漏),因此通常仅在性能敏感且安全性要求稍低的子系统中使用(如地面站数据处理的部分模块)。
3. Ada语言
- 地位:历史上因“安全关键系统(Safety-Critical Systems)”的特性被广泛采用,尤其在航空航天领域的早期项目中(如美国军用/航天标准MIL-STD-1815)。
- 原因:Ada语言天生为高可靠性设计,具备强类型检查、异常处理、并发模型(任务调度)等特性,能有效减少人为编码错误,符合DO-178C(航空软件)和ECSS(欧洲空间标准化合作组织)等严格标准。
- 现状:尽管近年被C/C++部分替代,但仍用于部分高安全需求场景(如欧洲阿丽亚娜系列火箭的部分控制系统、核安全相关的航天任务)。
二、地面测试与仿真:Python、MATLAB/Simulink
航天任务的研发周期中,地面测试、算法验证、系统仿真是关键环节,这类场景更注重开发效率和灵活性,因此:
1. Python
- 地位:地面测试与脚本自动化的首选语言。
- 原因:语法简洁、库生态丰富(如NumPy、SciPy用于数值计算,PyTest用于测试框架),适合快速编写测试脚本、数据处理工具或模拟卫星与地面站的通信协议。
- 应用案例:NASA的JPL(喷气推进实验室)常用Python编写火星车的地面测试脚本;欧洲空间局(ESA)的地面站系统也依赖Python进行数据解析和任务调度。
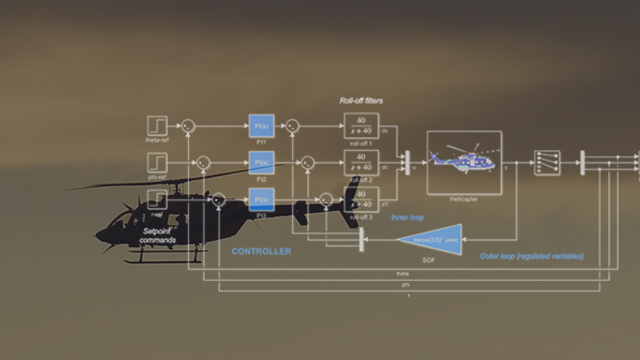
2. MATLAB/Simulink
- 地位:控制算法设计与仿真的事实标准。
- 原因:提供可视化的建模工具(Simulink),支持快速搭建动态系统模型(如火箭推进模型、卫星姿态控制算法),并通过代码生成工具(如Embedded Coder)将模型转换为C/C++代码,直接集成到嵌入式系统中。
- 应用案例:几乎所有航天器的控制算法(如PID控制、自适应控制)均通过Simulink设计并验证,最终生成可部署的代码。
三、专用场景:汇编、实时操作系统(RTOS)与领域特定语言
1. 汇编语言
- 应用:仅在极致性能优化或硬件交互的极小部分使用(如引导程序、中断处理)。由于可读性和维护性差,现代航天任务已很少直接编写汇编,仅在必要时(如修复硬件兼容性问题)局部使用。
2. 实时操作系统(RTOS)支持的语言
- 航天嵌入式系统通常运行RTOS(如VxWorks、FreeRTOS),这些系统本身用C开发,但上层应用需遵循RTOS的API规范(如任务调度、内存管理),因此C/C++是最适配的语言。
3. 领域特定语言(DSL)
- 部分场景会使用定制化DSL(如用于卫星轨道计算的数学建模语言),但最终通常会转换为C/C++或Ada代码执行。
四、标准与认证:语言选择的约束
航天软件需通过严格的国际标准认证(如:
- 航空领域:DO-178C(机载系统软件);
- 欧洲航天:ECSS-Q-ST-80(软件工程);
- 美国国防:MIL-STD-882(安全性)。
这些标准对语言的选择有明确要求:
- C:需严格遵循MISRA C(汽车/航空编码规范)以减少缺陷;
- Ada:天然符合ECSS和DO-178C的高安全等级要求;
- C++:需通过扩展规范(如JSF++)限制高风险特性(如动态内存分配)。
总结:主流语言的分工
| 场景 | 常用语言 | 核心原因 |
|---|---|---|
| 核心飞控/嵌入式系统 | C、Ada | 高效、低开销、符合安全标准 |
| 复杂系统架构设计 | C++ | 面向对象复用、模块化 |
| 地面测试/脚本自动化 | Python | 开发效率高、库生态丰富 |
| 控制算法设计与仿真 | MATLAB/Simulink | 可视化建模、代码生成 |
| 极致性能优化/硬件交互 | 汇编(少量) | 直接控制硬件,仅用于关键路径 |
典型案例:
- 阿波罗登月计划的制导计算机(AGC)使用汇编语言;
- 现代火星车(如毅力号)的飞控软件以C为主,部分模块用C++;
- 欧洲阿丽亚娜5号火箭的控制系统曾大量使用Ada语言;
- SpaceX的星链卫星地面站管理系统广泛使用Python进行自动化测试。
在航天器的核心控制系统(如飞控软件、导航制导、推进系统控制等)开发中,C#和Java并非主流选择,但在某些特定场景下可能有限使用。这主要取决于航天任务对实时性、可靠性、资源约束的要求,以及语言特性与系统需求的匹配度。以下从技术特性、标准限制和实际应用三个维度展开分析:
C#与Java可以用作航天核心控制系统开发?
一、C#与Java的核心特性与航天需求的冲突
航天核心控制系统对软件的核心要求是:
- 确定性:执行时间、响应延迟必须严格可控(如实时操作系统RTOS要求的微秒级响应);
- 低资源占用:嵌入式硬件(如星载计算机)通常内存(几十KB到几MB)和算力有限;
- 高可靠性:需通过严格的认证标准(如DO-178C Level A/B,ECSS-Q-ST-80),代码缺陷率需低于10⁻⁹(每千行代码的失效概率);
- 硬件亲和性:需直接操作底层硬件(如寄存器、中断、传感器接口)。
1. C#的限制
C#是微软推出的托管语言,依赖.NET运行时(CLR),其特性与航天核心控制的冲突主要体现在:
- 垃圾回收(GC)的不确定性:CLR的自动内存管理会触发不可预测的GC暂停(即使现代GC优化后,延迟仍可能达毫秒级),而航天实时系统要求延迟可预测(通常需亚毫秒级),GC可能导致任务超时或系统崩溃。
- 运行时依赖与环境限制:.NET Framework/.NET Core虽支持跨平台,但嵌入式场景(如星载计算机)通常采用实时操作系统(如VxWorks、FreeRTOS),而主流RTOS对.NET的支持有限(需定制移植,增加开发复杂度)。
- 生态与标准适配:C#的生态主要集中在企业级应用(如Web、桌面软件),缺乏航天领域专用的实时库、硬件驱动支持或符合DO-178C的工具链(如静态分析、形式化验证工具)。
2. Java的限制
Java的“一次编写,到处运行”特性依赖JVM(Java虚拟机),同样面临与航天核心控制的兼容性问题:
- JVM的内存管理与性能开销:JVM需要预留堆内存(通常数MB到数十MB),而星载计算机的可用内存可能仅几十KB到几MB;此外,垃圾回收(即使使用G1、ZGC等低延迟GC)仍可能导致不可预测的延迟(毫秒级),无法满足实时性要求。
- 运行时环境的资源消耗:JVM的启动时间、线程调度开销(如上下文切换)在嵌入式场景中可能成为瓶颈,而航天任务要求软件启动快速、资源占用极低。
- 标准认证的挑战:Java缺乏针对DO-178C Level A/B(最高安全等级)的认证工具链(如静态分析工具、形式化验证支持),难以满足航天软件的严格认证要求。
二、是否有例外?C#与Java在航天领域的实际应用
尽管C#和Java在核心控制系统中极少使用,但在非核心、非实时子系统中可能有有限应用,具体取决于任务需求和技术演进:
1. 地面测试与仿真系统
航天任务的地面测试(如火箭发射前的全系统联调、卫星在轨测试验证)需要开发大量自动化测试工具、数据监控平台或模拟器。这类场景对实时性要求较低(允许秒级延迟),更注重开发效率和跨平台兼容性,因此:
- C#:可用于编写Windows/Linux环境下的测试脚本、数据可视化工具(如利用WPF/WinForms做界面)或与硬件通信的中间件(如通过串口/网络协议与卫星模拟器交互)。
- Java:可用于构建跨平台的地面站管理系统(如任务调度、遥测数据处理),利用其生态中的Spring框架、Hibernate等简化开发。
2. 新兴技术探索:容器化与云原生
随着航天任务向“软件定义航天”演进(如星载计算机性能提升、边缘计算应用),部分新兴场景可能尝试使用托管语言:
- 低轨卫星星座的星载软件:部分新型卫星(如星链)的星载计算机算力较强(可能搭载ARM Cortex-A系列芯片),可能运行轻量级Linux系统。此时,Java(通过Trimmed JVM或GraalVM编译为本地代码)或C#(通过.NET for Linux)可能用于非实时子系统(如载荷管理、通信协议栈的上层逻辑)。
- 地面云控中心:航天任务的大数据分析、AI模型推理(如卫星图像识别)可能基于Java(Hadoop/Spark生态)或C#(.NET Machine Learning)开发,但这些属于地面后端,与核心控制无关。
3. 特殊场景的定制化移植
理论上,若通过深度裁剪JVM/CLR并针对嵌入式硬件优化(如移除不必要的功能、实现确定性GC),Java/C#可能勉强满足部分实时性要求,但需付出巨大成本:
- Java:需开发定制JVM(如Eclipse Kura项目尝试过为物联网设备优化Java运行时),但仅适用于资源相对充足的场景(如立方星的低功耗计算机,内存可能达数百MB)。
- C#:微软推出的.NET IoT(.NET for IoT)支持在树莓派等嵌入式设备上运行,但需手动管理内存(禁用GC或使用 unsafe 代码),本质上退化为类C的开发模式,失去了C#的优势。
三、航天核心控制系统的主流选择对比
与C#/Java相比,C、Ada、Rust等语言更符合核心控制需求:
| 语言 | 实时性 | 资源占用 | 可靠性 | 认证支持 | 典型场景 |
|---|---|---|---|---|---|
| C | 确定性高(无GC) | 极低(手动管理内存) | 高(需严格遵循MISRA C) | 完整支持DO-178C/ECSS | 核心飞控、嵌入式控制系统 |
| Ada | 确定性高(任务调度) | 低(静态类型检查) | 极高(强类型、异常安全) | 原生支持ECSS/DO-178C | 高安全需求子系统(如核安全) |
| Rust | 确定性高(无GC) | 低(零成本抽象) | 高(内存安全+所有权模型) | 正在探索(部分标准扩展) | 新兴嵌入式系统(如自动驾驶) |
| C#/Java | 不确定性(GC) | 高(运行时依赖) | 较低(依赖运行时正确性) | 缺乏DO-178C Level A认证 | 地面测试、非实时子系统 |
结论:C#与Java在航天核心控制中的定位
- 核心控制系统(如飞控、导航制导):C#和Java因垃圾回收的不确定性、运行时资源消耗高、缺乏高安全认证支持,几乎不会作为核心控制代码的开发语言。
- 非核心子系统或地面测试:在资源充足的场景(如新型卫星的载荷管理、地面站管理系统)中,C#和Java可能作为辅助语言使用,但需与其他语言(如C/C++)配合,核心逻辑仍由C/C++或Ada实现。
未来随着航天技术发展(如星载算力提升、新兴语言生态完善),Java/C#可能在特定边缘场景(如低轨卫星的星载应用层)中有限渗透,但短期内无法替代C/Ada等传统语言在核心控制领域的地位。