【MATLAB例程】追踪法制导的程序,适用于三维平面,目标是运动的,带绘图和捕获时间|附下载链接
追踪法(追踪导引法)是一种常见的导弹导引方式,其基本原理是保持导弹的速度矢量始终指向目标。在追踪法中,导弹的加速度可以表示为指向目标的加速度。
文章目录
- 功能概述
- 关键参数设置
- 代码结构
- 相关公式
- 2. **目标追踪公式**
- 运行结果
- MATLAB源代码
功能概述
本代码模拟导弹以追踪法(Pursuit Guidance)在三维空间内攻击匀速运动目标的过程。核心逻辑为:
- 制导策略:导弹速度方向始终指向目标当前位置(前置角为0),通过实时更新视线方向调整航向。
- 动态更新:目标和导弹的位置随时间步进更新,目标匀速运动,导弹速度固定但方向动态调整。
- 命中判定:当导弹与目标距离小于1米时判定为击中。
关键参数设置
- 时间参数
- 时间步长
dt = 0.1秒,总时长T_total = 1000秒
- 时间步长
- 目标初始状态
- 初始位置
[500, 500, 500]米,速度[10, -5, 2]米/秒
- 初始位置
- 导弹初始状态
- 初始位置
[10, 10, 10]米,固定速度30米/秒
- 初始位置
代码结构
- 初始化:设定参数、随机种子,预分配存储数组。
- 仿真循环:
- 计算导弹与目标的相对位置及距离。
- 更新导弹速度方向(沿视线单位矢量)。
- 动态推进目标与导弹位置。
- 结果可视化:
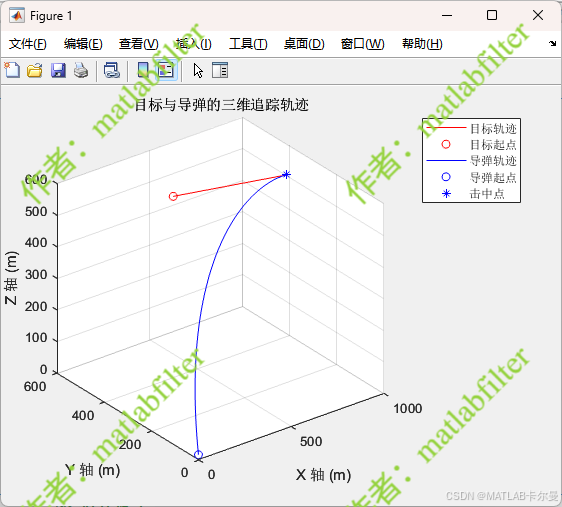
- 三维轨迹图:展示目标与导弹的空间运动路径。
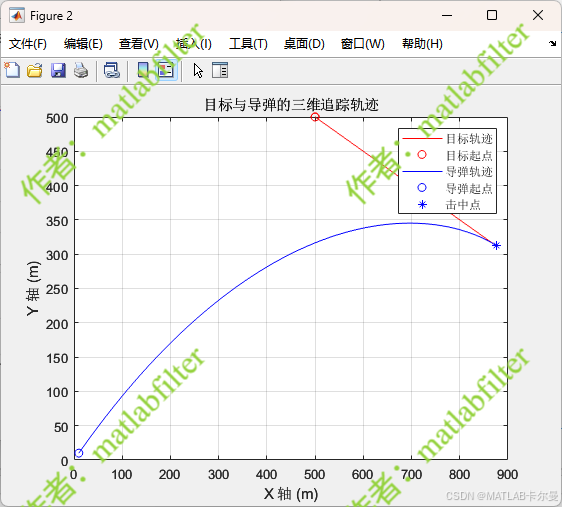
- 二维投影图(XoY平面):辅助分析水平面运动关系。
相关公式
-
位置更新公式:
p t + 1 = p t + v t ⋅ Δ t \mathbf{p}_{t+1} = \mathbf{p}_t + \mathbf{v}_t \cdot \Delta t pt+1=pt+vt⋅Δt
其中, p \mathbf{p} p是位置, v \mathbf{v} v是速度, Δ t \Delta t Δt是时间间隔。 -
速度更新公式:
v t + 1 = v t + a t ⋅ Δ t \mathbf{v}_{t+1} = \mathbf{v}_t + \mathbf{a}_t \cdot \Delta t vt+1=vt+at⋅Δt
其中, a \mathbf{a} a是加速度。
2. 目标追踪公式
- 追踪误差:
e = p t a r g e t − p c u r r e n t \mathbf{e} = \mathbf{p}_{target} - \mathbf{p}_{current} e=ptarget−pcurrent
该公式用于计算当前对象与目标之间的误差。
运行结果
三维追踪图示:
二维图示:
结果输出:
MATLAB源代码
程序结构:
部分代码:
% 追踪法制导(前置角为0)MATLAB代码实现导弹以追踪法制导攻击移动目标,三维
% 2025-06-09/Ver1
%% 初始化
clc; clear; close all;
rng(0);
% 时间步长和总时间
dt = 0.1; % 时间步长 (秒)
T_total = 1000; % 模拟总时间 (秒)
N = T_total / dt; % 总时间步数% 目标初始位置和速度
target_pos = [500, 500, 500]; % 目标初始位置 (x, y, z)
target_vel = [10, -5, 2]; % 目标速度向量 (vx, vy, vz)% 导弹初始位置和速度
missile_pos = [10, 10, 10]; % 导弹初始位置 (x, y, z)
missile_speed = 30; % 导弹固定速度 (m/s)% 数据存储
target_trajectory = zeros(N, 3); % 存储目标轨迹
missile_trajectory = zeros(N, 3); % 存储导弹轨迹
distance_to_target = zeros(N, 1); % 存储导弹与目标的距离
完整代码下载链接:https://download.csdn.net/download/callmeup/90969473
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者