优傲机器人推出全新关节扭矩直接控制技术,助力科研与AI应用创新
Universal Robots(优傲机器人,UR)近日提前推出了关节扭矩直接控制技术。该技术通过全新的低层控制接口,使研究人员和开发者能够以高达500Hz的频率实时控制所有关节的目标扭矩,显著提升了协作机器人在高精度任务中的表现。
这项功能无需用户自行开发底层软件堆栈,即可直接集成于UR的PolyScope 5和 PolyScope X 软件平台中,大大降低了使用门槛,让开发者更专注于算法验证、AI训练及实际应用开发。
优傲机器人技术副总裁 Anders Billesø Beck 表示:“我们在研究和教育领域,尤其是人工智能方向,观察到对直接扭矩控制的需求快速增长。新接口使研究人员可以更便捷地获取这一能力,而无需花费大量时间构建替代方案。”
直接扭矩控制在对力度要求较高的任务中表现出良好的适应性,例如装配、螺丝拧紧等精密操作场景。稳定的力量控制和细致的反馈能力是完成这类任务的重要因素,而新接口能够很好地满足这一需求。
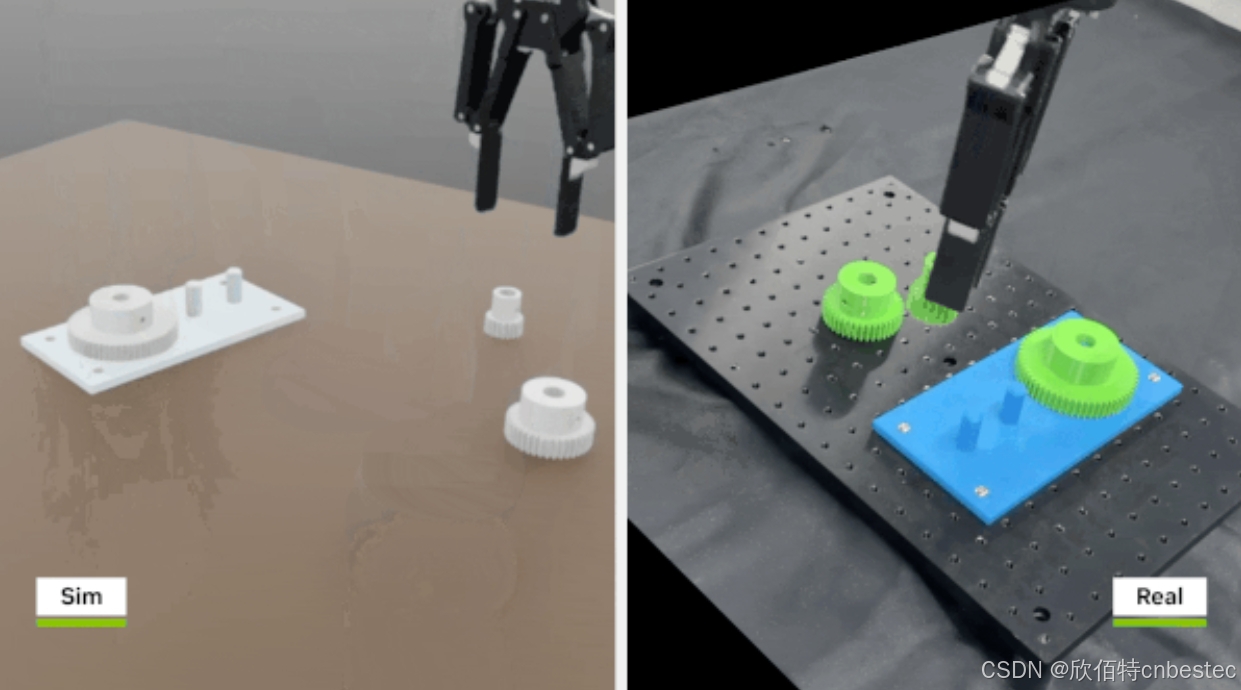
测试案例显示,NVIDIA Robotics 团队已参与该接口的早期验证,并成功应用于齿轮装配任务中,体现了其在仿真到现实(Sim2Real)迁移方面的实际效果。
该接口全面兼容UR全系列产品线,包括e系列和UR系列协作机器人,确保了良好的系统兼容性和易用性。


对于希望探索柔性制造、AI控制策略验证以及科研创新的研究机构和企业而言,优傲机器人的直接扭矩控制接口无疑提供了一个强大且实用的新工具,助力协作机器人迈向更高阶的智能应用。
FAQ
Universal Robots直接力矩控制接口支持哪些机器人型号?
Universal Robots全系列协作机器人均支持该接口。用户可在UR3e、UR5e、UR10e等主流型号上实现高频力矩控制。
开发者能否用主流编程语言调用该接口?
开发者可使用Python、C++等主流编程语言调用接口。官方文档提供丰富示例,便于快速集成与开发。
该接口适用于哪些典型应用场景?
精密装配
AI算法验证
教育科研
柔性制造