随记:sw2urdf插件导出urdf模型在ROS2-rviz2显示
sw2urdf插件,目前官方最新版本是21年更新的1.6.1版本https://github.com/ros/solidworks_urdf_exporter/releases,其导出的urdf package是基于ros1使用的,所以在当下普遍使用的ROS2的环境下并不能直接使用,需要做相应修改。
参考文章:https://zhuanlan.zhihu.com/p/465398486
0. 前置准备
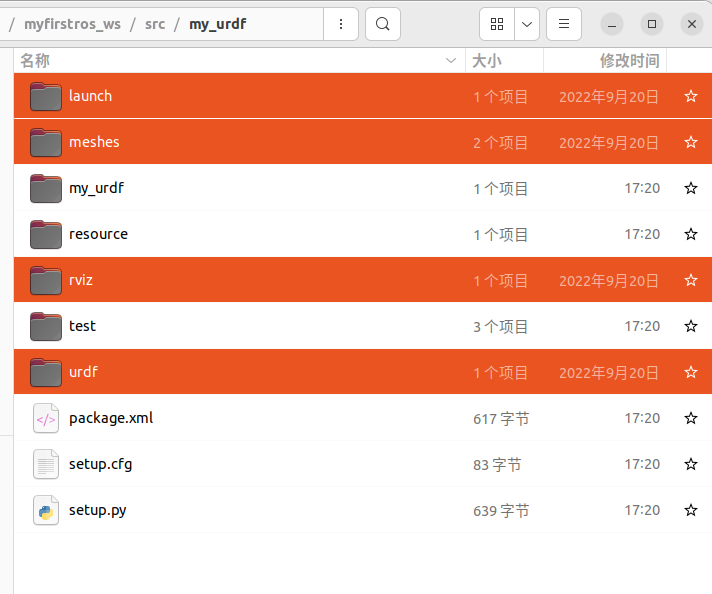
首先,准备好使用sw2urdf插件生成的urdf package,目录结构如下
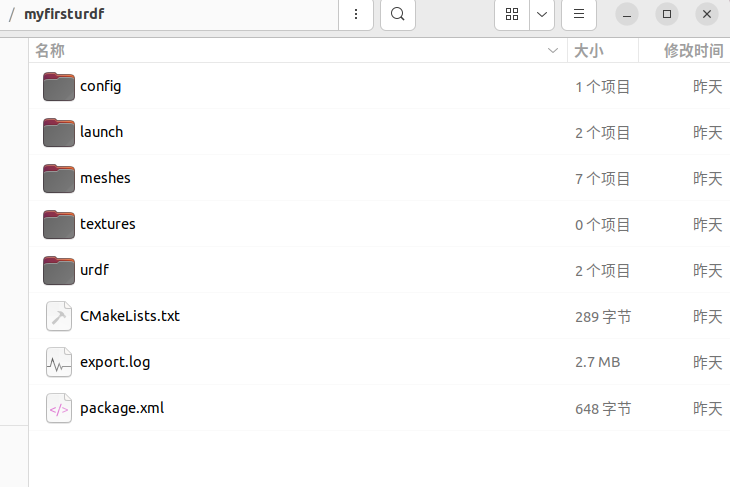
并确保自己的ros2环境配置成功、rviz2已经安装等...
找一个别人改好的包,比如:GitHub - olmerg/lesson_urdf: This is a ros2 package to create an arm robot in rviz using robot_state_publisher and joint_state_publisher gui
内容包括:
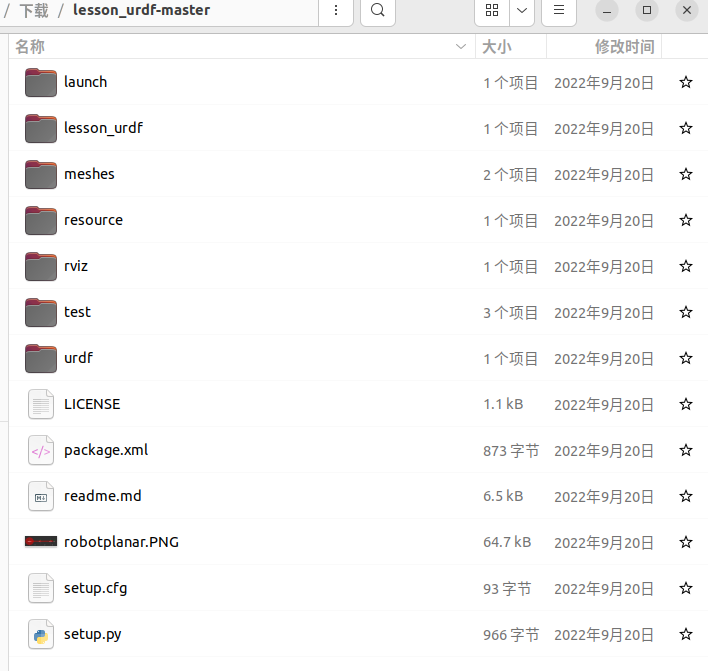
能用到这个功能的基本上也都学了怎么建ros2 workspace了,下载完《lesson_urdf-master》这个包以后,可以把整个包先放到自己的workspace/src下跑一下验证下环境是否OK:
colcon build
source install/setup.bash
ros2 launch lesson_urdf view_robot_launch.py打开后,把fixed frame改成base link正常显示
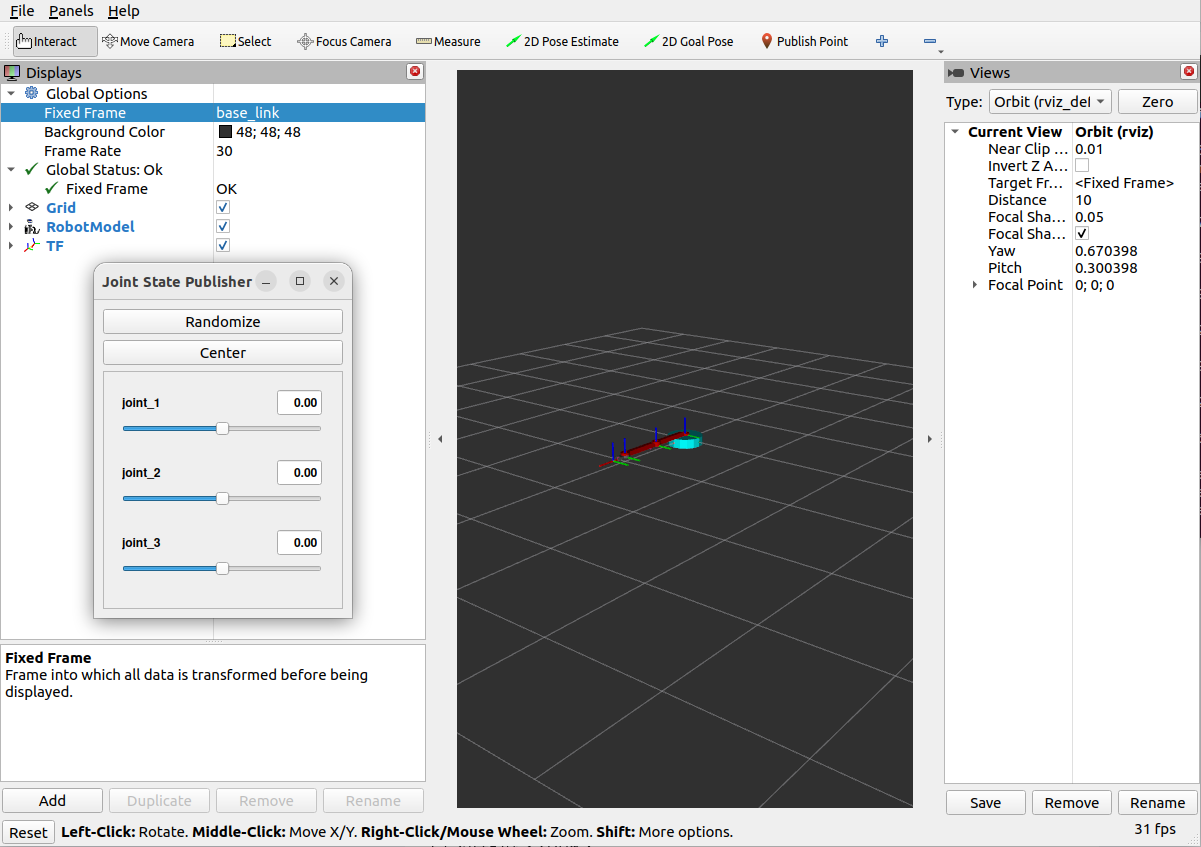
验证好之后先删掉colcon build出来的文件夹,把《lesson_urdf-master》也从自己的workspace删掉,就好像它从没来过
1. URDF package构建
现在,由于插件生成的ros1的urdf pkg不能直接使用,github clone的包也不是我们的目标模型,我们基于这两个包直接从0攒一个新包:
step1:在workspace里创建一个新包
cd src/
ros2 pkg create my_urdf --build-type ament_pythonstep2: 把 《lesson_urdf-master》里的launch、meshes、rviz、urdf四个文件夹copy到my_urdf下:
step3:第二步是利用现有“轮子”的配置方式,对应地,我们要把配置内容改成自己的模型,
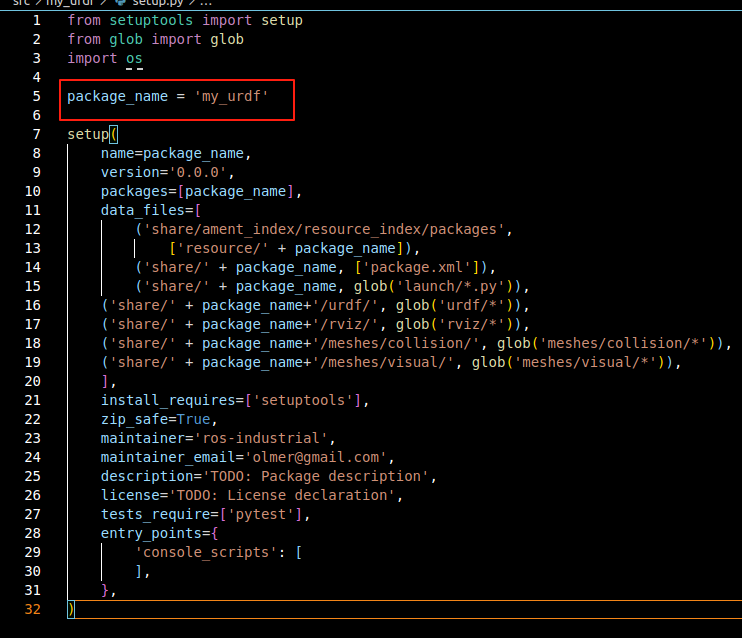
1)修改setup.py,把《lesson_urdf-master》的setup.py文件的所有内容直接复制到自己包的setup,py里,再把包名改成自己的包名
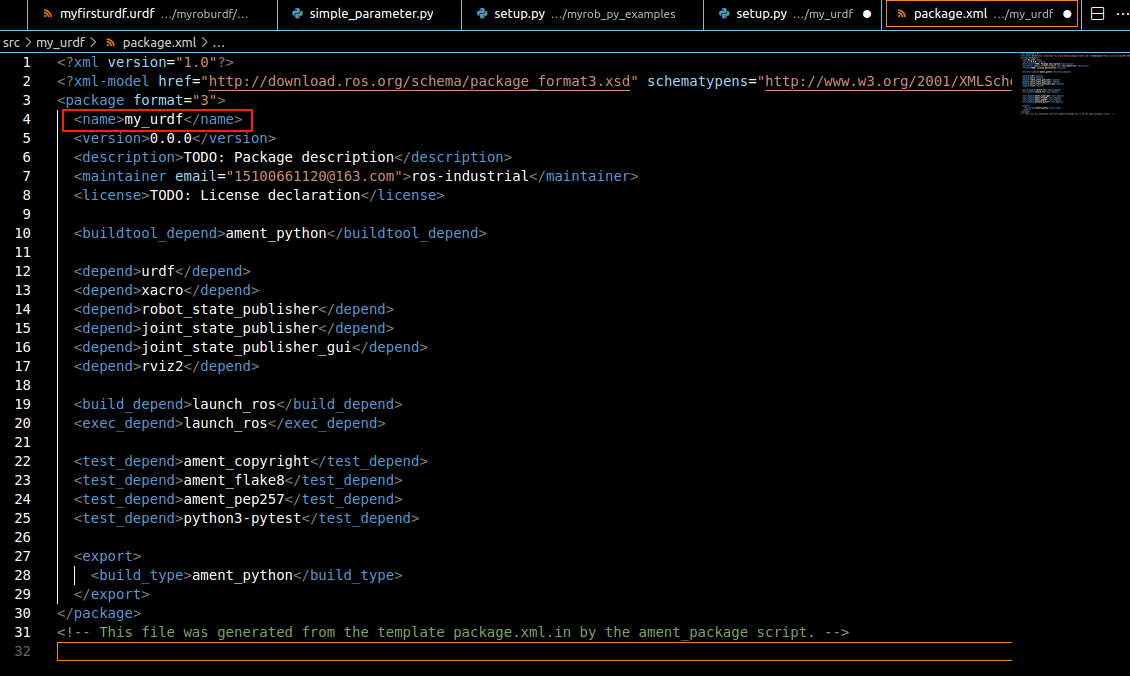
2)修改package.xml文件,把《lesson_urdf-master》的package.xml文件的所有内容直接复制到自己包的package.xml里,再把包名改成自己的包名
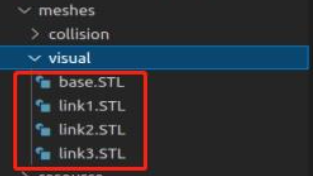
3)修改meshes文件夹,这里有两个文件夹,meshes/collision和meshes/visual,分别把两个包里原带的.STL文件删除,再从自己使用插件生成的pkg里的meshes文件夹下,找到自己的STL文件,分别全部复制到两个文件夹下
 原文件夹
原文件夹
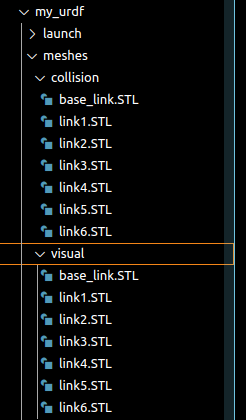 导入自己的STL文件后
导入自己的STL文件后
4)修改urdf文件,首先把从sw_urdf插件导出的urdf文件夹中后缀为urdf的文件拷贝到自己的my_urdf的urdf文件夹下面
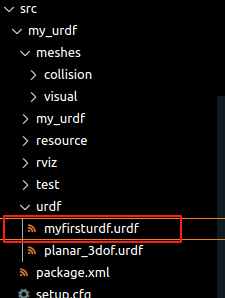
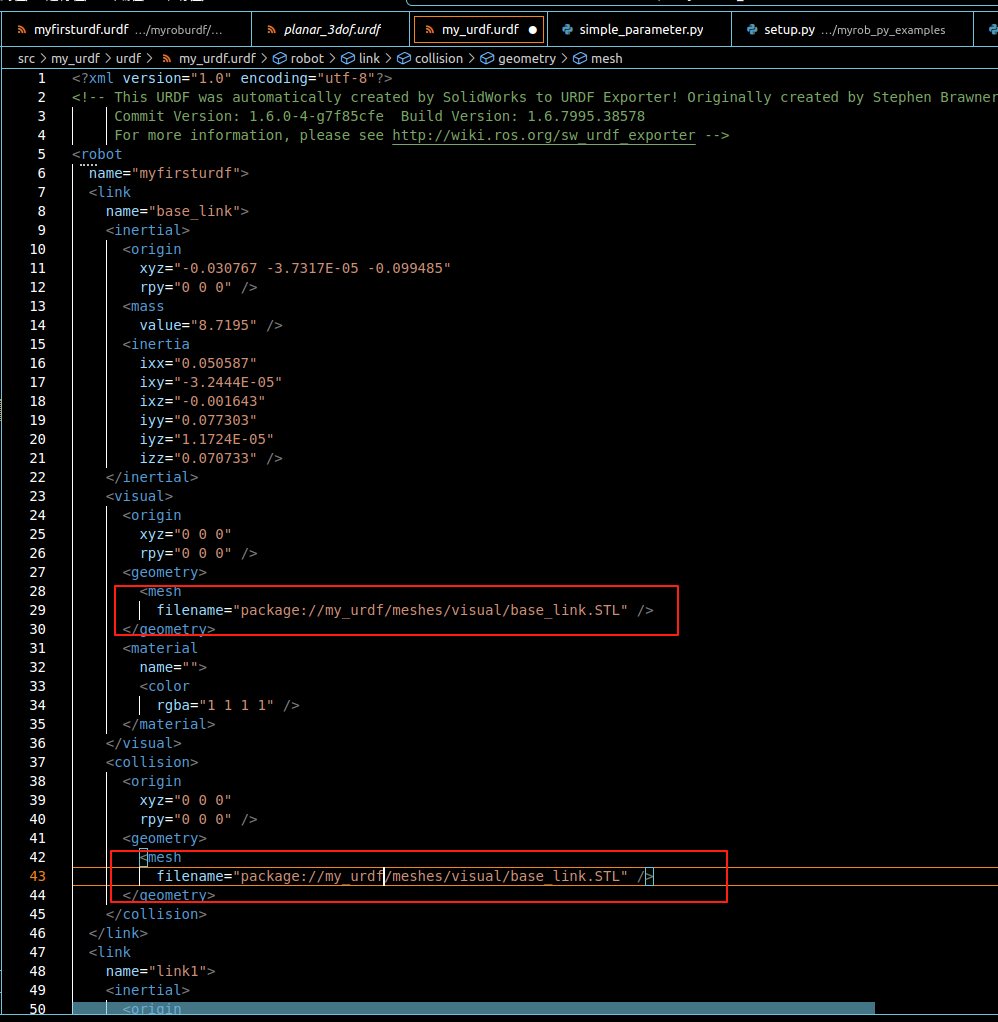
接下来打开,之后把urdf文件中的所有包路径改成现在的包的路径,相当多...
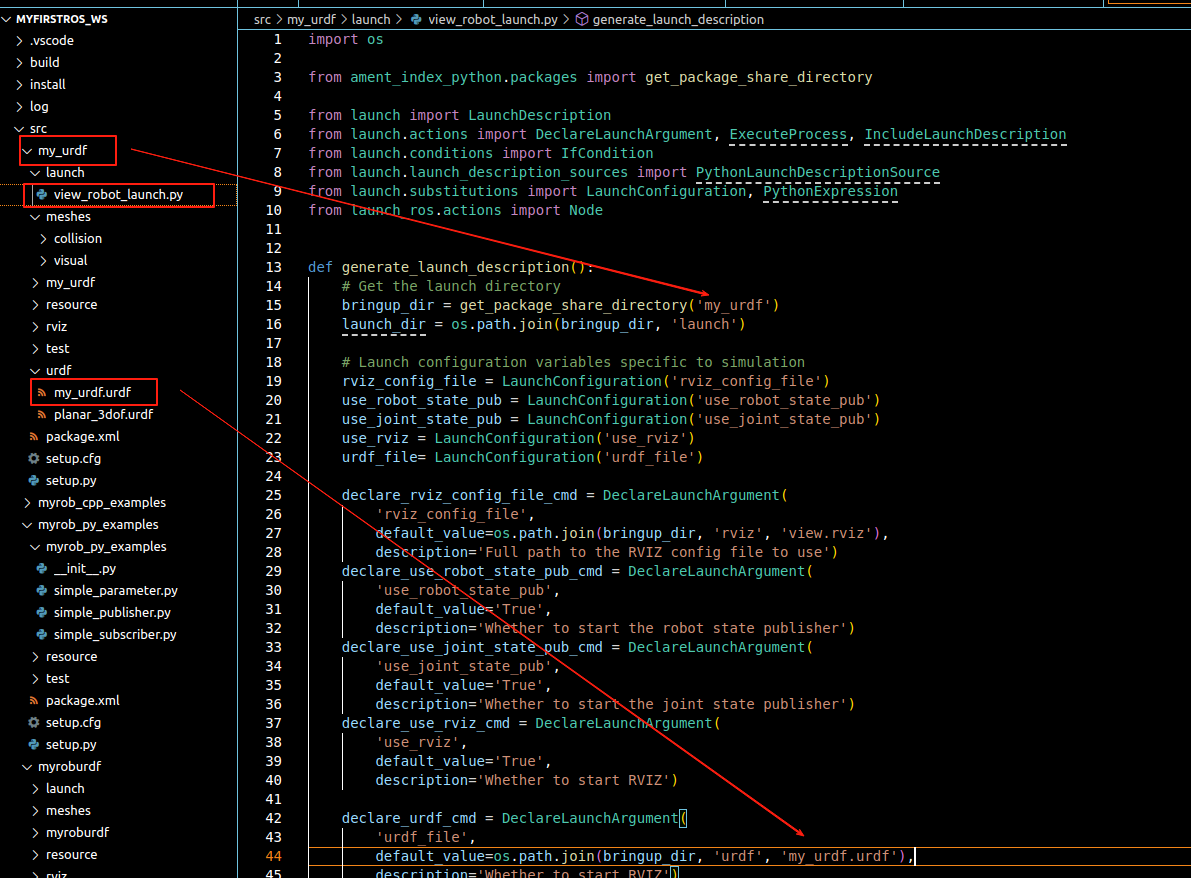
5)修改launch文件, 分别修改包和urdf文件的索引路径,可以顺手改一下launch文件的名字,便于区分使用
2. RVIZ2显示
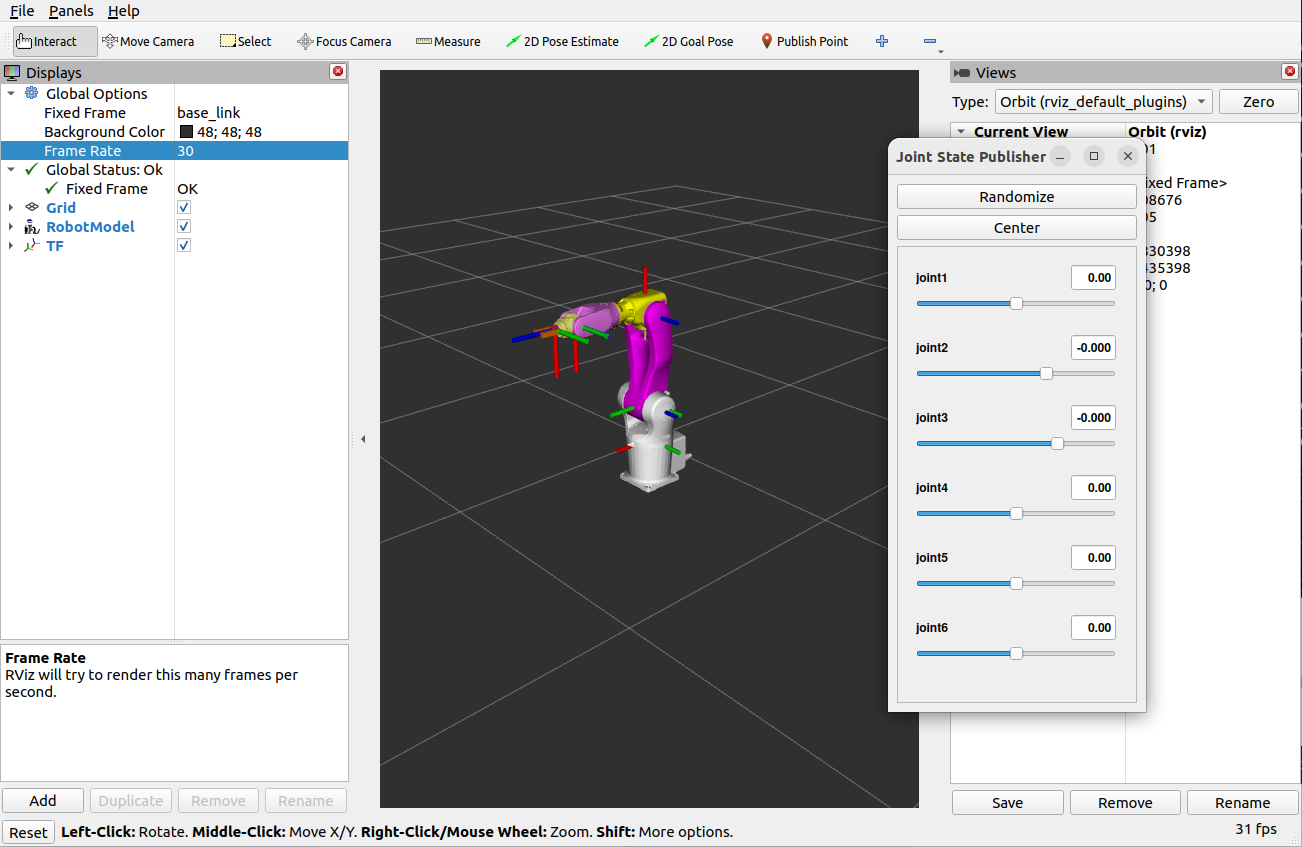
以上修改都做完之后,回到工作空间colcon build编译一下,之后source install/setup.bash一下环境,接着启动launch文件
ros2 launch my_urdf view2_robot_launch.py活了