51单片机基础day3
1.UART
通用异步收发器,2个串口(1个串口被用于ISP下载程序,1个串口被用于和主机之间的通信),RXD(接收信号线)TXD(发送信号线)
1.1 硬件通信形式
单工:
- 发送方和接收方是固定的
- 通过一根信号线进行数据传输
- 数据传输的方向呈现单一性
半双工(I2C)
- 通信的双方既可以作为发送方又可以作为接收方
- 通过一根信号线进行数据传输
- 数据传输的方向可以是双向,但同一时刻数据传输方向呈现单一性
全双工(UART)
- 通信的双方既可以作为发送方又可以作为接收方
- 通过两根信号线进行数据传输
- 数据传输的方向任意时刻都是双向
1.2 数据传输的顺序
Uart在传输数据时,遵循LSB优先原则(低位先行),先发低位数据
1.3 数据传输的形式
串行:通过一根信号线传输数据,按照先后次序逐个bit逐个bit去发送数据
特点:
- 硬件成本低,实现简单
- 传输速率慢
- 传输距离远,抗干扰性好(RS485)
并行:同时多根信号线同时去传输数据
特点:
- 传输速度快
- 硬件成本高,实现复杂
- 传输距离近,抗干扰弱
- 30米以内(并行线路间信号偏移)
- 电磁波干扰
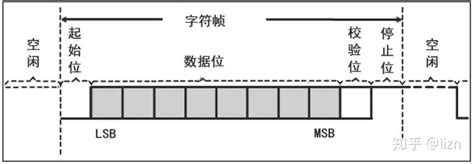
1.4 串口通信时序
- 串口通信时,空闲状态为高电平
- 当由高电平变为低电平(发送一个低电平信号),代表发送了一个起始位,准备开始通信
- 发送数据(通常是8bit,遵循先发数据低位LSB原则)
- 再发送一个bit的校验位(奇偶校验)
- 再发送一个bit的停止位
数据位:
- 8,串口传输通常8bit数据位传输
停止位:
- 1,1bit停止位
校验位:
- None,N,无校验
- Even,E,偶校验
- Odd,O,奇校验
1.5 奇偶校验
- 问题:无法检测偶数个bit出错
- 奇校验:校验位为1,若数据位中1的个数加上校验位中的1,保持"1的个数为奇数个,则代表校验通过
- 偶校验:校验位为0,若数据位中1的个数加上校验位中的0,保持1的个数为偶数个,则代表校验通过
1.6 波特率
bps(bit per second):每秒钟传输bit的数量, 常见的波特率:2400, 4800, 9600
9600, 8, N, 1:9600bps, 8数据位, N校验位, 1停止位
1.7 同步通信、异步通信
I2CUARTSPI同步?异步?(时钟线)
I2C:SCL时钟线
SPI:SCLK时钟线
UART:无时钟线异步
- 同步:通信的双方有一根共享的时钟线来约定通信的频率(同步发送数据/接收数据)
- 异步:通信双方没有时钟线进行同步,如Uart:可以通过设置波特率来实现同步(发:2400bps 收:2400bps)
1.8 串口寄存器配置
串口的波特率发生器依赖于定时器1(Timer1)
SCON/PCON串口控制寄存器:
PCON寄存器中的bit6置0代表通过SCON寄存器中SM0和SM1两位指定串口工作方式:
- 将SCON寄存器中的bit6和bit7清0
- 将SCON寄存器中的SM1bit6置1,SM0bit7清0,代表串口工作8位UART模式
- 将SCON寄存器中REN bit4置1,代表允许串口接收数据
- SCON寄存器中bit1TI位,代表串口8位数据发送完毕硬件自动置1,但需要软件清0(查询)
- SCON寄存器bitORI位,代表串口8位数据接收完毕硬件自动置1,但需要软件清0(查询)
- PCON寄存器SMODbit7位置1,代表波特率加倍
定时器相关寄存器配置
TMOD定时器模式选择寄存器:
- 将TMOD寄存器中的高四位清0(定时器1)
- 将TMOD寄存器中的bit5置1,bit4清0,代表定时器1工作在8位自动重装载模式
- 将定时器初值写入到TL1和TH1
- 将TCON寄存器中的bit6置1,代表允许定时器1开始计数
中断寄存器相关配置
IE中断控制寄存器:
- 将IE寄存器中的bit7 EA位置1,代表CPU能够响应所有中断
- 将IE寄存器中的bit4 ES位置1,代表允许串口产生中断
1.9 主从应答
- 主机:拥有对通信绝对控制权,通信都是由主机发起
- 从机:无法直接发起通信,只能根据主机下发的指令完成对应操作