[yolov11改进系列]基于yolov11引入高效卷积模块SCConv减少冗余计算并提升特征学习的python源码+训练源码
[SCConv介绍]
本文尝试利用特征之间的空间和通道冗余来进行CNN压缩,并提出了一种高效的卷积模块,称为SCConv (spatial and channel reconstruction convolution),以减少冗余计算并促进代表性特征的学习。提出的SCConv由空间重构单元(SRU)和信道重构单元(CRU)两个单元组成。
(1)SRU根据权重分离冗余特征并进行重构,以抑制空间维度上的冗余,增强特征的表征。
(2)CRU采用分裂变换和融合策略来减少信道维度的冗余以及计算成本和存储。
(3)SCConv是一种即插即用的架构单元,可直接用于替代各种卷积神经网络中的标准卷积。实验结果表明,scconvo嵌入模型能够通过减少冗余特征来获得更好的性能,并且显著降低了复杂度和计算成本。
| 方法
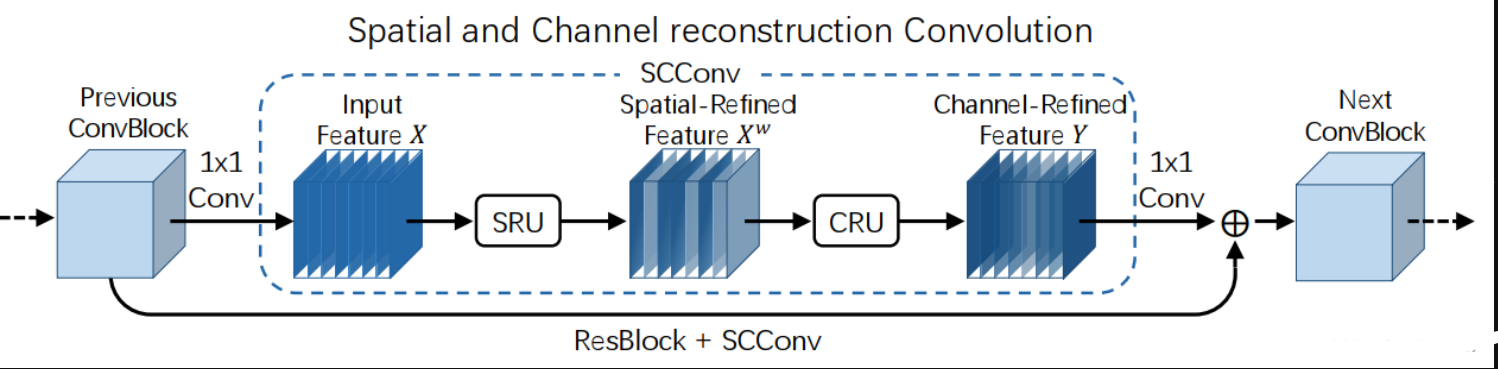
SCConv如图1所示,它由两个单元组成,空间重建单元(SRU)和通道重建单元(CRU),以顺序的方式放置。具体而言,对于瓶颈残差块中的中间输入特征X,首先通过SRU运算获得空间细化特征Xw,然后利用CRU运算获得信道细化特征Y。SCConv模块充分利用了特征之间的空间冗余和通道冗余,可以无缝集成到任何CNN架构中,以减少中间特征映射之间的冗余并增强CNN的特征表示。
1)SRU单元用于空间冗余
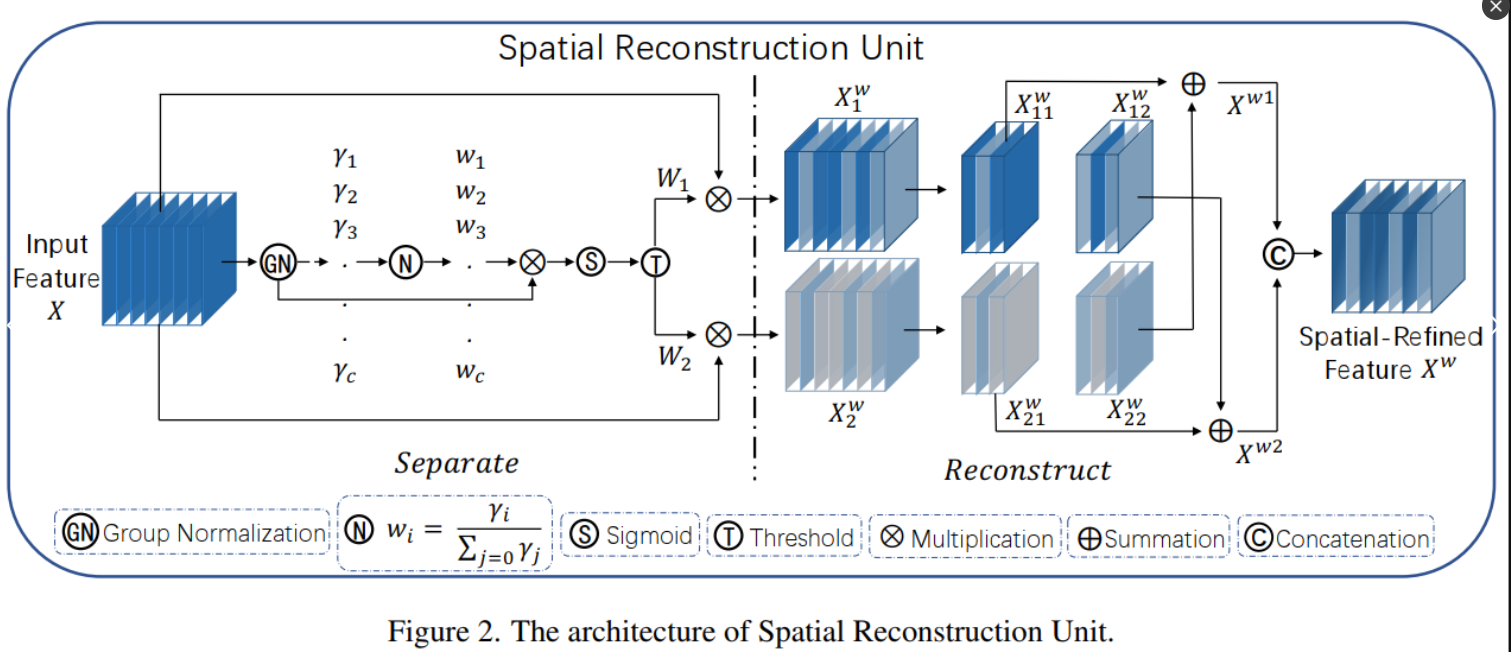
为了利用特征的空间冗余,引入了空间重构单元(SRU),如图2所示,它利用了分离和重构操作。
分离操作 的目的是将信息丰富的特征图与空间内容对应的信息较少的特征图分离开来。我们利用组归一化(GN)层中的比例因子来评估不同特征图的信息内容。具体来说,给定一个中间特征映射X∈R N×C×H×W,首先通过减去平均值µ并除以标准差σ来标准化输入特征X,如下所示:

其中µ和σ是X的均值和标准差,ε是为了除法稳定性而加入的一个小的正常数,γ和β是可训练的仿射变换。
GN层中的可训练参数用于测量每个批次和通道的空间像素方差。更丰富的空间信息反映了空间像素的更多变化,从而导致更大的γ。归一化相关权重
由下面公式2得到,表示不同特征映射的重要性。

然后将经Wγ重新加权的特征映射的权值通过sigmoid函数映射到(0,1)范围,并通过阈值进行门控。我们将阈值以上的权重设置为1,得到信息权重W1,将其设置为0,得到非信息权重W2(实验中阈值设置为0.5)。获取W的整个过程可以用公式3表示。
![]()
最后将输入特征X分别乘以W1和W2,得到两个加权特征:信息量较大的特征和信息量较小的特征
。这样就成功地将输入特征分为两部分:
具有信息量和表达性的空间内容,而
几乎没有信息,被认为是冗余的。
重构操作 将信息丰富的特征与信息较少的特征相加,生成信息更丰富的特征,从而节省空间空间。采用交叉重构运算,将加权后的两个不同的信息特征充分结合起来,加强它们之间的信息流。然后将交叉重构的特征和
进行拼接,得到空间精细特征映射
。从后过程表示如下:

其中⊗是逐元素的乘法,⊕是逐元素的求和,∪是串联。将SRU应用于中间输入特征X后,不仅将信息特征与信息较少的特征分离,而且对其进行重构,增强代表性特征,抑制空间维度上的冗余特征。然而,空间精细特征映射在通道维度上仍然是冗余的。
2)CRU单元用于通道冗余
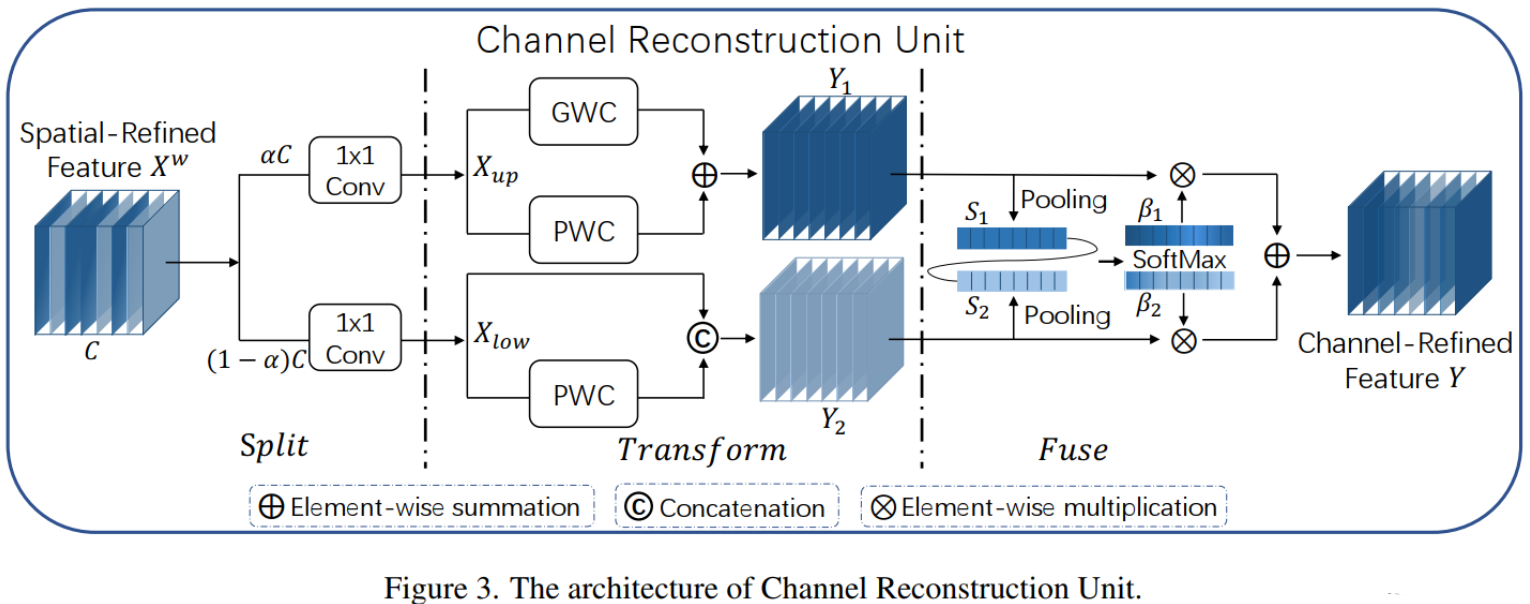
分割 操作将输入的空间细化特征分割成两个部分,一部分通道数是
,另一部分通道数是
,随后对两组特征的通道数使用1 * 1卷积核进行压缩,分别得到
和
。
转换 操作将输入的作为“富特征提取”的输入,分别进行GWC和PWC,然后相加得到输出Y1,将输入
作为“富特征提取”的补充,进行PWC,得到的记过和原来的输入取并集得到Y2。
融合 操作使用简化的SKNet方法来自适应合并Y1和Y2。具体说是首先使用全局平均池化将全局空间信息和通道统计信息结合起来,得到经过池化的S1和S2。然后对S1和S2做Softmax得到特征权重向量和
,最后使用特征权重向量得到输出
,Y即为通道提炼的特征。
【yolov11框架介绍】
2024 年 9 月 30 日,Ultralytics 在其活动 YOLOVision 中正式发布了 YOLOv11。YOLOv11 是 YOLO 的最新版本,由美国和西班牙的 Ultralytics 团队开发。YOLO 是一种用于基于图像的人工智能的计算机模
Ultralytics YOLO11 概述
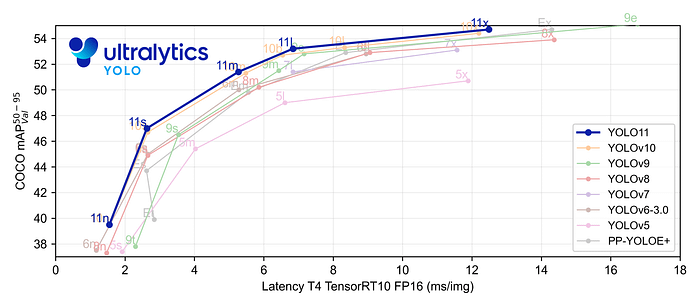
YOLO11 是Ultralytics YOLO 系列实时物体检测器的最新版本,以尖端的精度、速度和效率重新定义了可能性。基于先前 YOLO 版本的令人印象深刻的进步,YOLO11 在架构和训练方法方面引入了重大改进,使其成为各种计算机视觉任务的多功能选择。
Key Features 主要特点
- 增强的特征提取:YOLO11采用改进的主干和颈部架构,增强了特征提取能力,以实现更精确的目标检测和复杂任务性能。
- 针对效率和速度进行优化:YOLO11 引入了精致的架构设计和优化的训练管道,提供更快的处理速度并保持准确性和性能之间的最佳平衡。
- 使用更少的参数获得更高的精度:随着模型设计的进步,YOLO11m 在 COCO 数据集上实现了更高的平均精度(mAP),同时使用的参数比 YOLOv8m 少 22%,从而在不影响精度的情况下提高计算效率。
- 跨环境适应性:YOLO11可以无缝部署在各种环境中,包括边缘设备、云平台以及支持NVIDIA GPU的系统,确保最大的灵活性。
- 支持的任务范围广泛:无论是对象检测、实例分割、图像分类、姿态估计还是定向对象检测 (OBB),YOLO11 旨在应对各种计算机视觉挑战。
与之前的版本相比,Ultralytics YOLO11 有哪些关键改进?
Ultralytics YOLO11 与其前身相比引入了多项重大进步。主要改进包括:
- 增强的特征提取:YOLO11采用改进的主干和颈部架构,增强了特征提取能力,以实现更精确的目标检测。
- 优化的效率和速度:精细的架构设计和优化的训练管道可提供更快的处理速度,同时保持准确性和性能之间的平衡。
- 使用更少的参数获得更高的精度:YOLO11m 在 COCO 数据集上实现了更高的平均精度(mAP),参数比 YOLOv8m 少 22%,从而在不影响精度的情况下提高计算效率。
- 跨环境适应性:YOLO11可以跨各种环境部署,包括边缘设备、云平台和支持NVIDIA GPU的系统。
- 支持的任务范围广泛:YOLO11 支持多种计算机视觉任务,例如对象检测、实例分割、图像分类、姿态估计和定向对象检测 (OBB)
【测试环境】
windows10 x64
ultralytics==8.3.0
torch==2.3.1
【改进流程】
1. 新增SCConv.py和一个conv.py实现模块(代码太多,核心模块源码请参考改进步骤.docx)然后在同级目录下面创建一个__init___.py文件写代码
from .SCConv. import *
2. 文件修改步骤
修改tasks.py文件
创建模型配置文件
yolo11-C3k2-SCConv.yaml内容如下:
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLO11 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolo11n.yaml' will call yolo11.yaml with scale 'n'# [depth, width, max_channels]n: [0.50, 0.25, 1024] # summary: 319 layers, 2624080 parameters, 2624064 gradients, 6.6 GFLOPss: [0.50, 0.50, 1024] # summary: 319 layers, 9458752 parameters, 9458736 gradients, 21.7 GFLOPsm: [0.50, 1.00, 512] # summary: 409 layers, 20114688 parameters, 20114672 gradients, 68.5 GFLOPsl: [1.00, 1.00, 512] # summary: 631 layers, 25372160 parameters, 25372144 gradients, 87.6 GFLOPsx: [1.00, 1.50, 512] # summary: 631 layers, 56966176 parameters, 56966160 gradients, 196.0 GFLOPs# YOLO11n backbone
backbone:# [from, repeats, module, args]- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4- [-1, 2, C3k2, [256, False, 0.25]]- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8- [-1, 2, C3k2, [512, False, 0.25]]- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16- [-1, 2, C3k2, [512, True]]- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32- [-1, 2, C3k2_SCConv, [1024, True]]- [-1, 1, SPPF, [1024, 5]] # 9- [-1, 2, C2PSA, [1024]] # 10# YOLO11n head
head:- [-1, 1, nn.Upsample, [None, 2, "nearest"]]- [[-1, 6], 1, Concat, [1]] # cat backbone P4- [-1, 2, C3k2, [512, False]] # 13- [-1, 1, nn.Upsample, [None, 2, "nearest"]]- [[-1, 4], 1, Concat, [1]] # cat backbone P3- [-1, 2, C3k2, [256, False]] # 16 (P3/8-small)- [-1, 1, Conv, [256, 3, 2]]- [[-1, 13], 1, Concat, [1]] # cat head P4- [-1, 2, C3k2, [512, False]] # 19 (P4/16-medium)- [-1, 1, Conv, [512, 3, 2]]- [[-1, 10], 1, Concat, [1]] # cat head P5- [-1, 2, C3k2_SCConv, [1024, True]] # 22 (P5/32-large)- [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)3. 验证集成
使用新建的yaml配置文件启动训练任务:
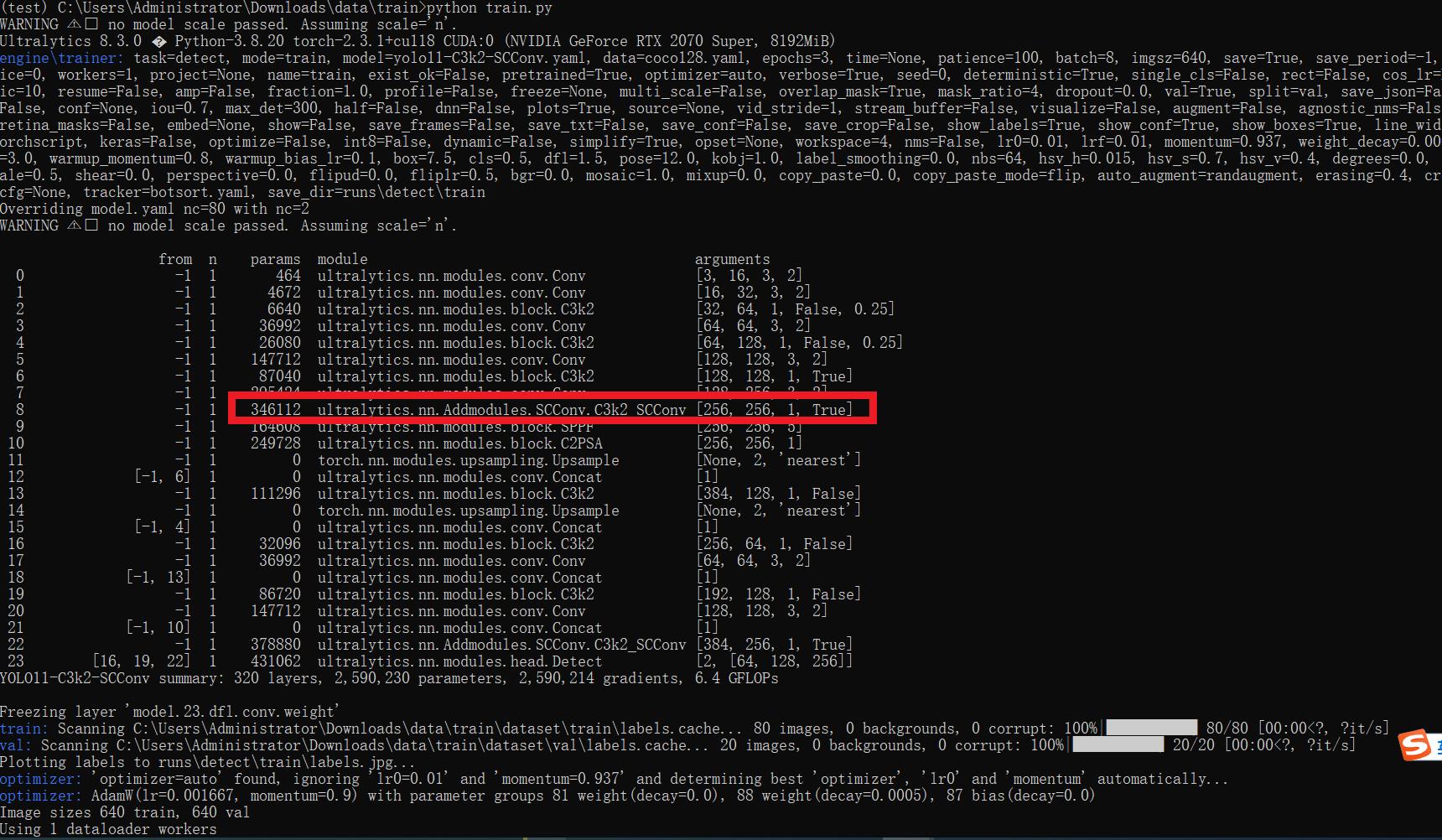
from ultralytics import YOLOif __name__ == '__main__':model = YOLO('yolo11-C3k2-SCConv..yaml') # build from YAML and transfer weights# Train the modelresults = model.train(data='coco128.yaml',epochs=100, imgsz=640, batch=8, device=0, workers=1, save=True,resume=False)成功集成后,训练日志中将显示SCConv.模块的初始化信息,表明已正确加载到模型中。
【训练说明】
第一步:首先安装好yolov11必要模块,可以参考yolov11框架安装流程,然后卸载官方版本pip uninstall ultralytics,最后安装改进的源码pip install .
第二步:将自己数据集按照dataset文件夹摆放,要求文件夹名字都不要改变
第三步:分别打开train.py,coco128.yaml和模型参数yaml文件修改必要的参数,最后执行python train.py即可训练
【提供文件】
├── [官方源码]ultralytics-8.3.0.zip
├── train/
│ ├── coco128.yaml
│ ├── dataset/
│ │ ├── train/
│ │ │ ├── images/
│ │ │ │ ├── firc_pic_1.jpg
│ │ │ │ ├── firc_pic_10.jpg
│ │ │ │ ├── firc_pic_11.jpg
│ │ │ │ ├── firc_pic_12.jpg
│ │ │ │ ├── firc_pic_13.jpg
│ │ │ ├── labels/
│ │ │ │ ├── classes.txt
│ │ │ │ ├── firc_pic_1.txt
│ │ │ │ ├── firc_pic_10.txt
│ │ │ │ ├── firc_pic_11.txt
│ │ │ │ ├── firc_pic_12.txt
│ │ │ │ ├── firc_pic_13.txt
│ │ └── val/
│ │ ├── images/
│ │ │ ├── firc_pic_100.jpg
│ │ │ ├── firc_pic_81.jpg
│ │ │ ├── firc_pic_82.jpg
│ │ │ ├── firc_pic_83.jpg
│ │ │ ├── firc_pic_84.jpg
│ │ ├── labels/
│ │ │ ├── firc_pic_100.txt
│ │ │ ├── firc_pic_81.txt
│ │ │ ├── firc_pic_82.txt
│ │ │ ├── firc_pic_83.txt
│ │ │ ├── firc_pic_84.txt
│ ├── train.py
│ ├── yolo11-C3k2-SCConv.yaml
│ └── 训练说明.txt
├── [改进源码]ultralytics-8.3.0.zip
├── 改进原理.docx
└── 改进流程.docx 【常见问题汇总】
问:为什么我训练的模型epoch显示的map都是0或者map精度很低?
回答:由于源码改进过,因此不能直接从官方模型微调,而是从头训练,这样学习特征能力会很弱,需要训练很多epoch才能出现效果。此外由于改进的源码框架并不一定能够保证会超过官方精度,而且也有可能会存在远远不如官方效果,甚至精度会很低。这说明改进的框架并不能取得很好效果。所以说对于框架改进只是提供一种可行方案,至于改进后能不能取得很好map还需要结合实际训练情况确认,当然也不排除数据集存在问题,比如数据集比较单一,样本分布不均衡,泛化场景少,标注框不太贴合标注质量差,检测目标很小等等原因
【重要说明】
我们只提供改进框架一种方案,并不保证能够取得很好训练精度,甚至超过官方模型精度。因为改进框架,实际是一种比较复杂流程,包括框架原理可行性,训练数据集是否合适,训练需要反正验证以及同类框架训练结果参数比较,这个是十分复杂且漫长的过程。